
一种基于自适应迭代学习的电阻加热炉温度控制方法.pdf

淑然****by

1/6

2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于自适应迭代学习的电阻加热炉温度控制方法.pdf
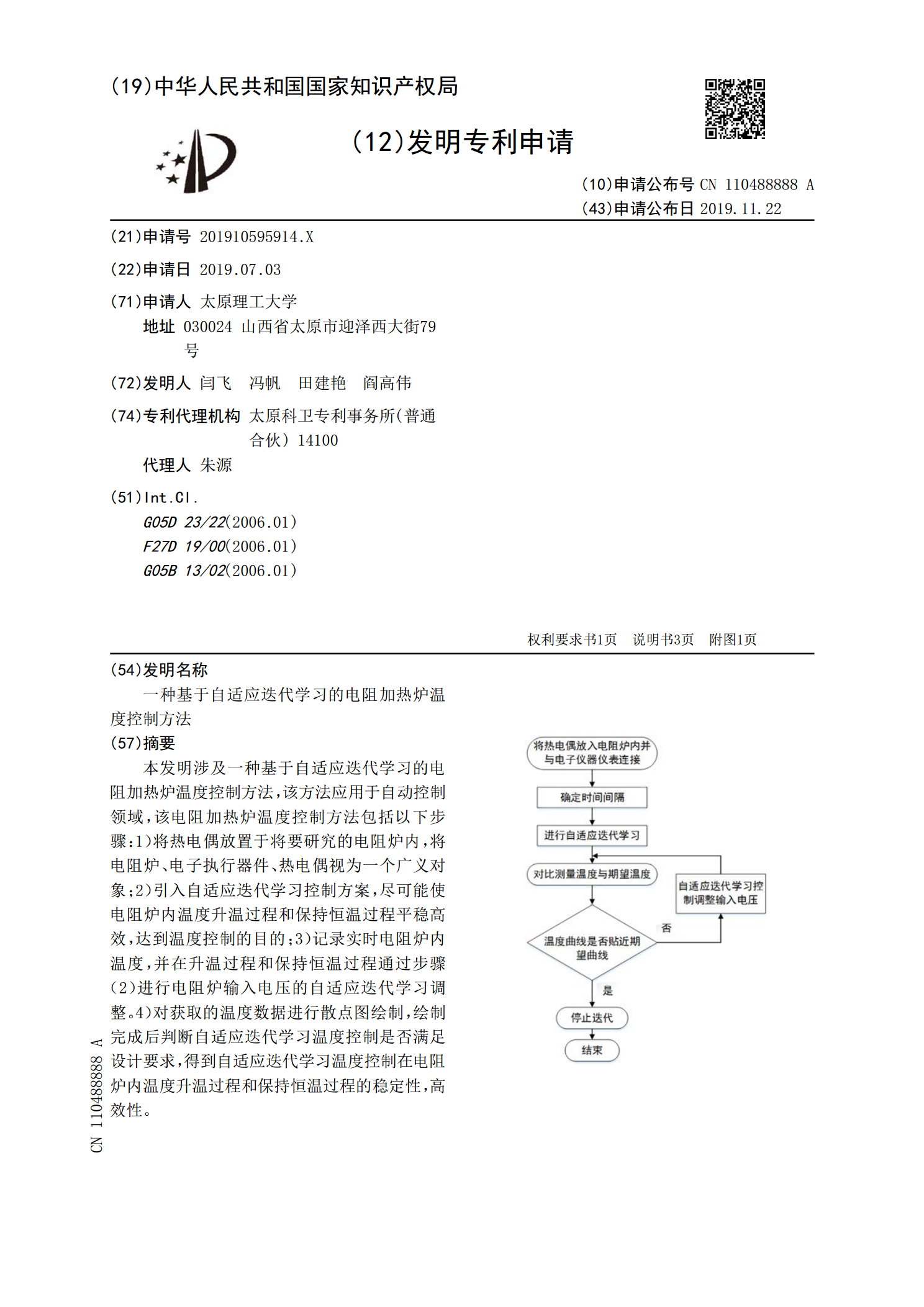
本发明涉及一种基于自适应迭代学习的电阻加热炉温度控制方法,该方法应用于自动控制领域,该电阻加热炉温度控制方法包括以下步骤:1)将热电偶放置于将要研究的电阻炉内,将电阻炉、电子执行器件、热电偶视为一个广义对象;2)引入自适应迭代学习控制方案,尽可能使电阻炉内温度升温过程和保持恒温过程平稳高效,达到温度控制的目的;3)记录实时电阻炉内温度,并在升温过程和保持恒温过程通过步骤(2)进行电阻炉输入电压的自适应迭代学习调整。4)对获取的温度数据进行散点图绘制,绘制完成后判断自适应迭代学习温度控制是否满足设计要求,得
一种基于耦合迭代的加热炉出钢温度预测方法.pdf
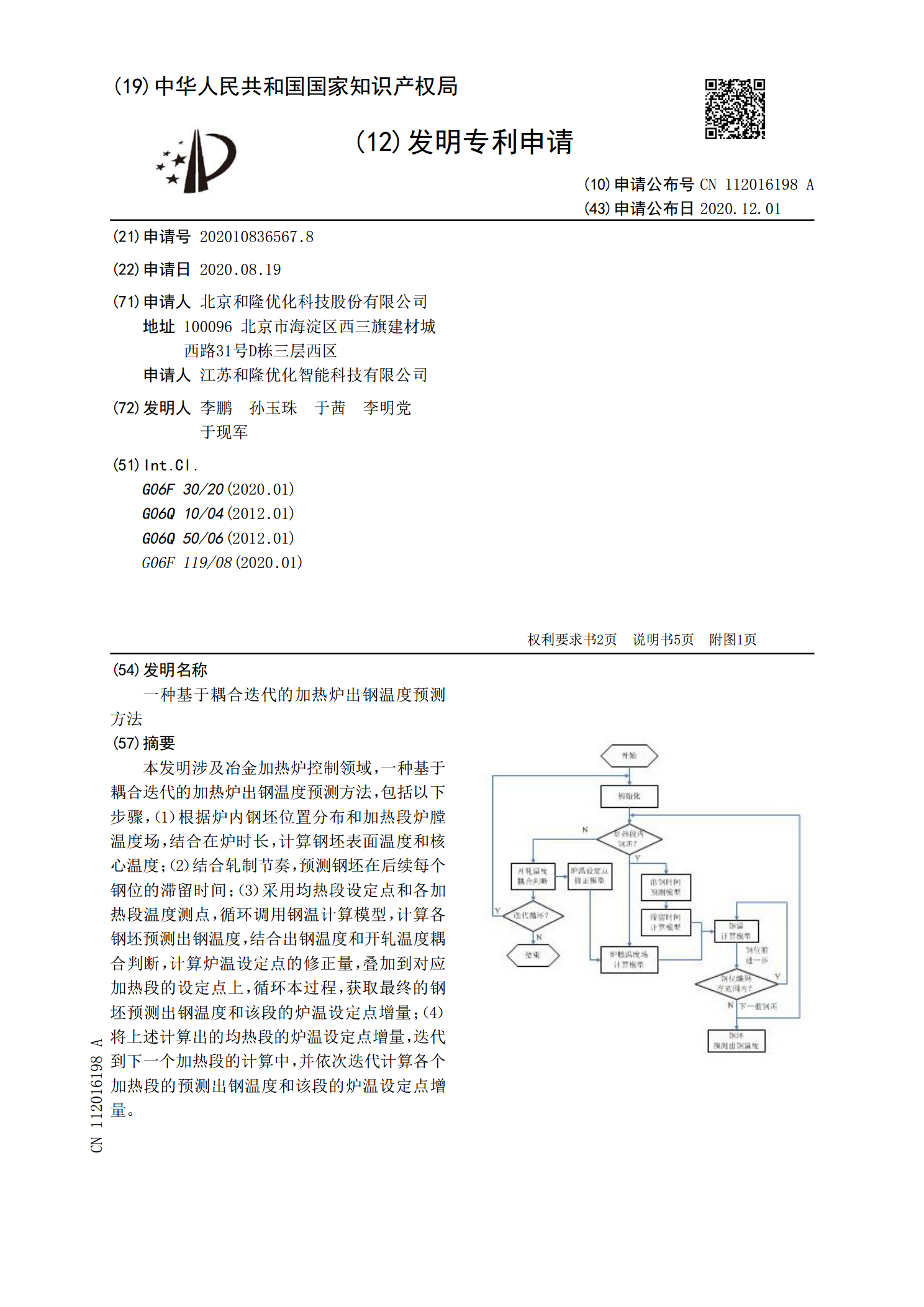
本发明涉及冶金加热炉控制领域,一种基于耦合迭代的加热炉出钢温度预测方法,包括以下步骤,(1)根据炉内钢坯位置分布和加热段炉膛温度场,结合在炉时长,计算钢坯表面温度和核心温度;(2)结合轧制节奏,预测钢坯在后续每个钢位的滞留时间;(3)采用均热段设定点和各加热段温度测点,循环调用钢温计算模型,计算各钢坯预测出钢温度,结合出钢温度和开轧温度耦合判断,计算炉温设定点的修正量,叠加到对应加热段的设定点上,循环本过程,获取最终的钢坯预测出钢温度和该段的炉温设定点增量;(4)将上述计算出的均热段的炉温设定点增量,迭代

基于自适应迭代学习控制的轨迹跟踪研究.docx
基于自适应迭代学习控制的轨迹跟踪研究基于自适应迭代学习控制的轨迹跟踪研究摘要:近年来,轨迹跟踪在控制系统中得到了广泛的应用和研究,然而现有的控制算法在处理非线性和变参数系统方面存在一定的局限性。为了克服这些问题,本文提出了一种基于自适应迭代学习控制的轨迹跟踪方法。该方法结合自适应控制与迭代学习控制的优势,在实际控制系统中能够实现较好的跟踪效果。本文对该方法的原理和算法进行了详细阐述,并通过仿真实验验证了该方法的性能。结果表明,基于自适应迭代学习控制的轨迹跟踪方法具有良好的鲁棒性和适应性,能够有效地应对非线

电阻加热炉温度控制.docx
电阻加热炉温度控制电阻加热炉温度控制一、摘要温度是工业对象中主要的被控参数之一。特别是在冶金、化工、机械各类工业中,广泛使用各种加热炉、热处理炉、反应炉等。由于炉子的种类不同,所采用的加热方法及燃料也不相同,如煤气、天然气等。但就控制系统本身的动态特性而言,均属于一阶纯滞后环节,在控制算法上基本相同,可采用PID控制或其他纯滞后补偿算法。为了保证生产过程正常安全地进行,提高产品的质量和数量,以及减轻工人的劳动强度,节约能源,对加热用的各种电炉要求在一定条件下保持恒温,不能随电源电压波动或炉内物体而变化,或

电阻加热炉温度控制.doc
一、摘要温度是工业对象中主要的被控参数之一。特别是在冶金、化工、机械各类工业中,广泛使用各种加热炉、热处理炉、反应炉等。由于炉子的种类不同,所采用的加热方法及燃料也不相同,如煤气、天然气等。但就控制系统本身的动态特性而言,均属于一阶纯滞后环节,在控制算法上基本相同,可采用PID控制或其他纯滞后补偿算法。为了保证生产过程正常安全地进行,提高产品的质量和数量,以及减轻工人的劳动强度,节约能源,对加热用的各种电炉要求在一定条件下保持恒温,不能随电源电压波动或炉内物体而变化,或者有