
基于数据建模和多前馈PID的化学加氨自动控制方法.pdf

戊午****jj


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于数据建模和多前馈PID的化学加氨自动控制方法.pdf
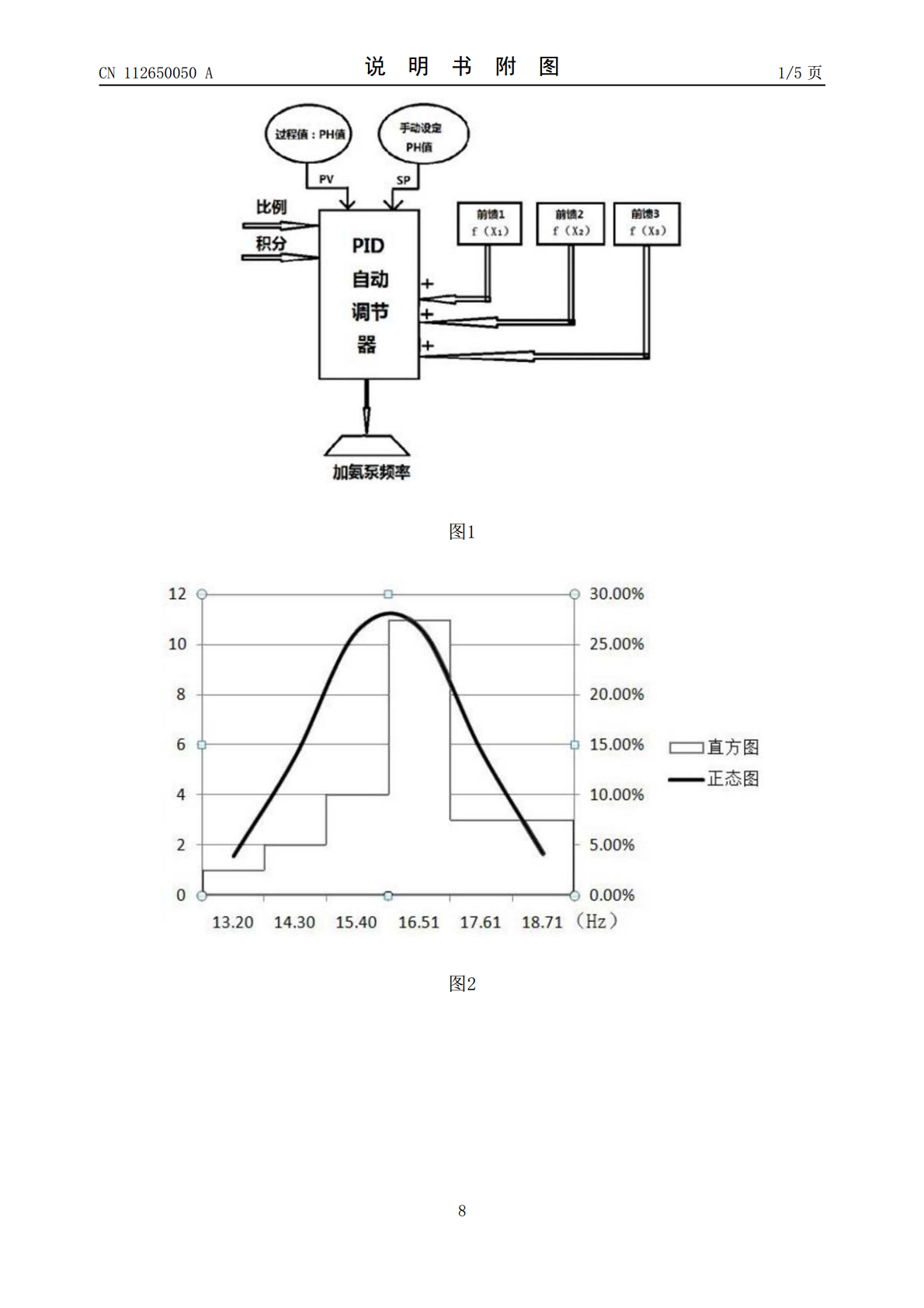
本发明公开了基于数据建模和多前馈PID的化学加氨自动控制方法,采用数学建模加多前馈PID算法解决常规凝结水和给水加氨自动大迟延无法投运的难题,实现火电机组凝结水和给水加氨自动控制,实现化学精处理无人值班,提高自动控制程度,保证化学汽水品质的稳定。同时通过该发明解决了非线性大时滞典型热控控制难题,摸索出一套适用于主机锅炉,脱硝等同样具有控制难题的方法和经验,提高热工人员技能水平和提高整个机组自动化程度。
锅炉给水自动加氨装置及灰色预测前馈PID控制方法.pdf
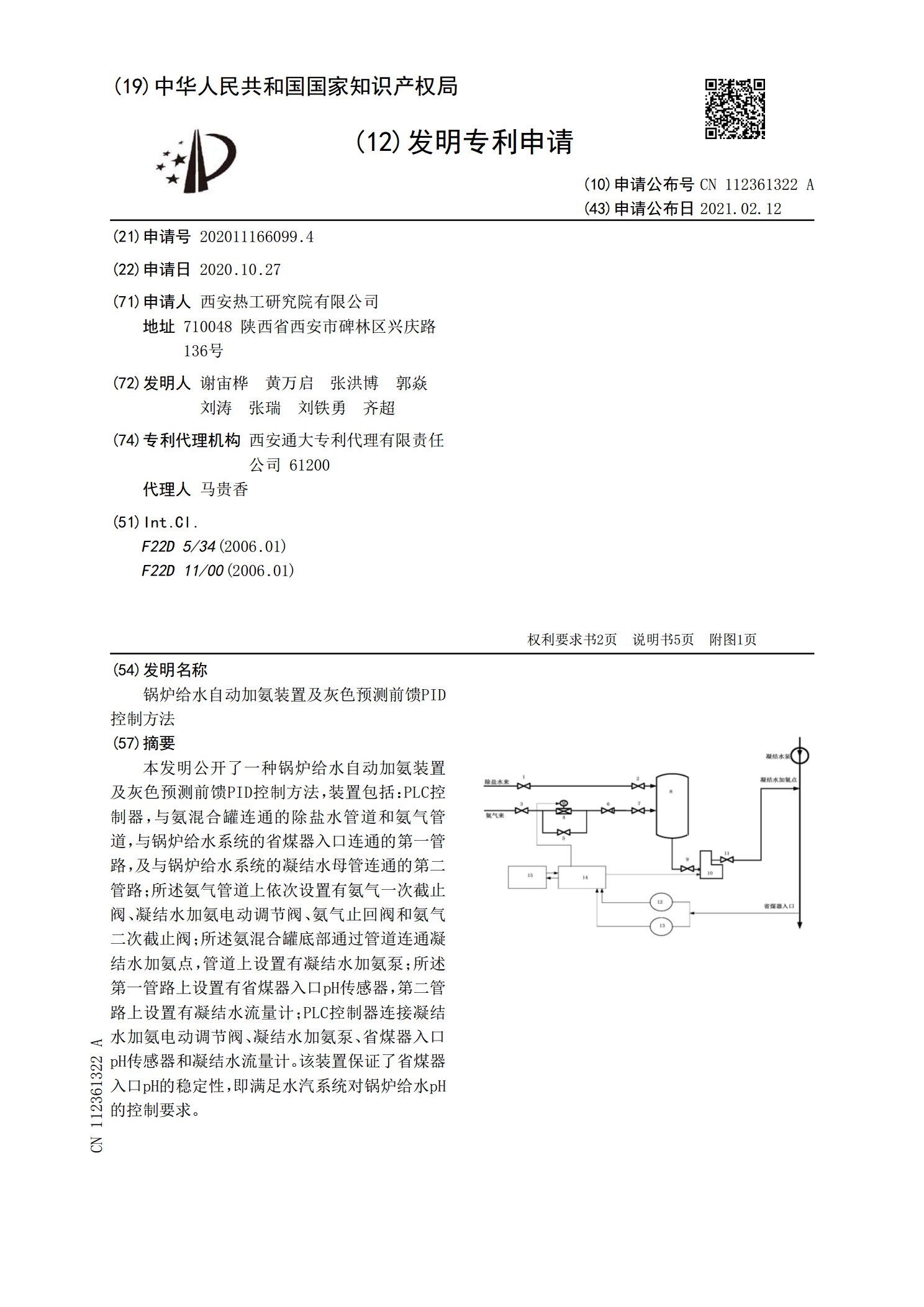
本发明公开了一种锅炉给水自动加氨装置及灰色预测前馈PID控制方法,装置包括:PLC控制器,与氨混合罐连通的除盐水管道和氨气管道,与锅炉给水系统的省煤器入口连通的第一管路,及与锅炉给水系统的凝结水母管连通的第二管路;所述氨气管道上依次设置有氨气一次截止阀、凝结水加氨电动调节阀、氨气止回阀和氨气二次截止阀;所述氨混合罐底部通过管道连通凝结水加氨点,管道上设置有凝结水加氨泵;所述第一管路上设置有省煤器入口pH传感器,第二管路上设置有凝结水流量计;PLC控制器连接凝结水加氨电动调节阀、凝结水加氨泵、省煤器入口pH

基于氨氮前馈的溶解氧模糊自适应PID控制.docx
基于氨氮前馈的溶解氧模糊自适应PID控制基于氨氮前馈的溶解氧模糊自适应PID控制摘要:溶解氧是水体中重要的水质指标之一,对于水生生物生长和水体健康具有重要影响。因此,实现溶解氧的准确控制成为水环境治理的一项关键技术。本文提出了一种基于氨氮前馈的溶解氧模糊自适应PID控制方法,该方法采用模糊逻辑控制器和PID控制器相结合的方式,通过氨氮浓度作为前馈信号,实现对溶解氧的在线调节。1.引言水体中溶解氧的浓度对于水体的生态环境和水生生物的健康具有重要影响。过高或过低的溶解氧浓度都会对生物生态系统产生不良影响。因此

前馈PID控制.doc
前馈PID控制控制量=前馈+PID,前馈实际上是利用对象特征,属于开环控制。优点是提高系统响应速度,减小反馈控制压力。如果对对象特征不清楚,就无法用前馈.在控制算法调试过程中注意一下事项:控制周期确定控制周期应该与系统的响应匹配,相应传感器采样周期与控制周期大体一致.如果传感器采样周期比控制周期大很多,可能造成系统不稳定。如电机控制中电流变化快,毫秒级变化,相应的电流环周期应该是毫秒级,电流采用也是毫秒级。目前电动自行车控制器电流环控制周期是2ms,速度环相对比较慢,大概100ms。前馈控制量确定1)电机

基于模糊PID前馈控制的VRV空调控制方法研究.docx
基于模糊PID前馈控制的VRV空调控制方法研究基于模糊PID前馈控制的VRV空调控制方法研究摘要:随着VRV(VariableRefrigerantVolume)空调系统的广泛应用,对于其控制方法的研究也变得尤为重要。本文基于模糊PID前馈控制方法,对VRV空调系统进行控制,并模拟了温度调节过程,验证了该方法的有效性和性能。实验结果表明,模糊PID前馈控制方法能够快速、准确地调节环境温度,提高空调系统的控制精度。关键词:VRV空调系统,控制方法,模糊PID前馈控制,温度调节,控制精度1.研究背景与意义随着