
一种电站锅炉主蒸汽温度控制方法.pdf

是你****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电站锅炉主蒸汽温度控制方法.pdf
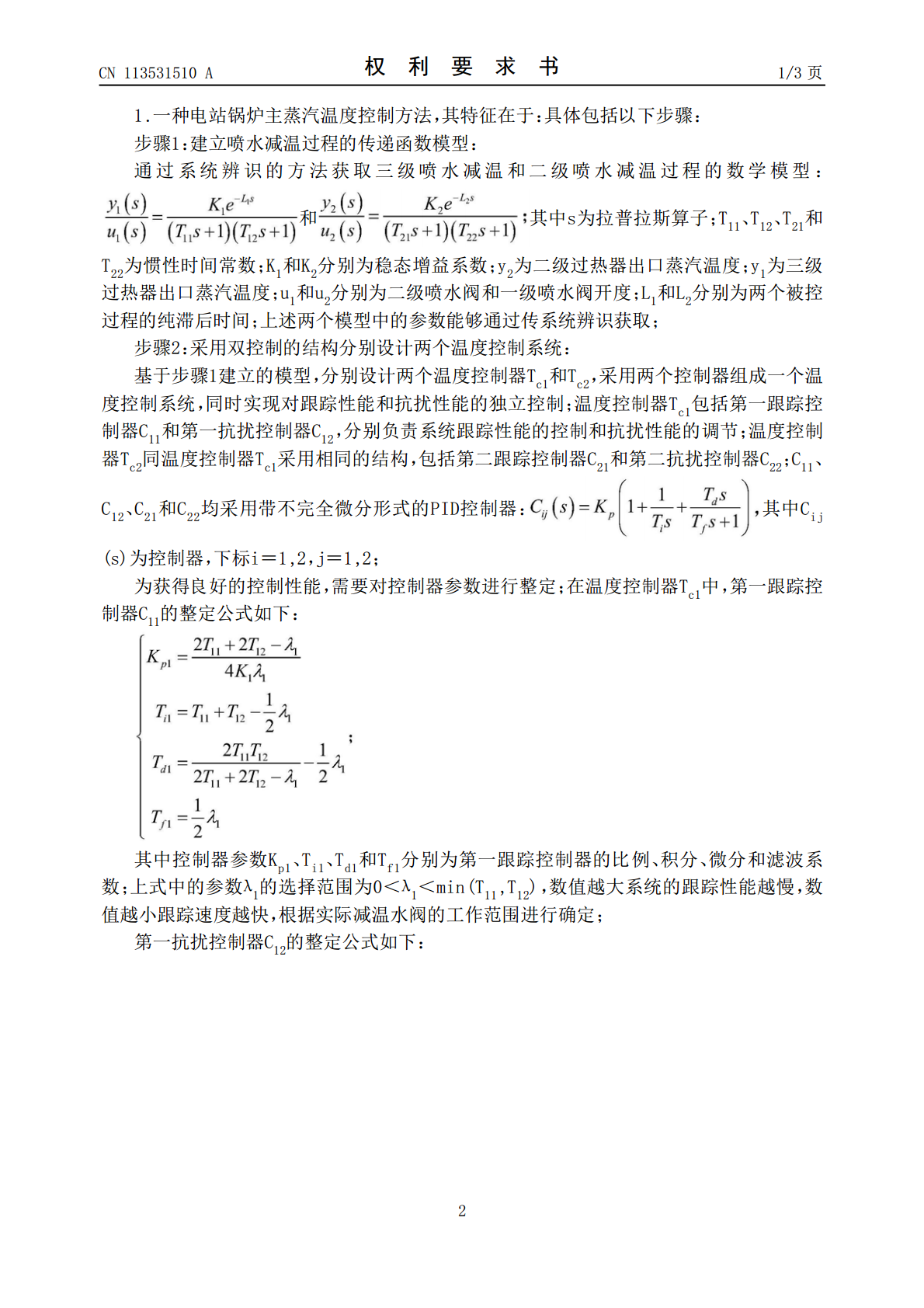
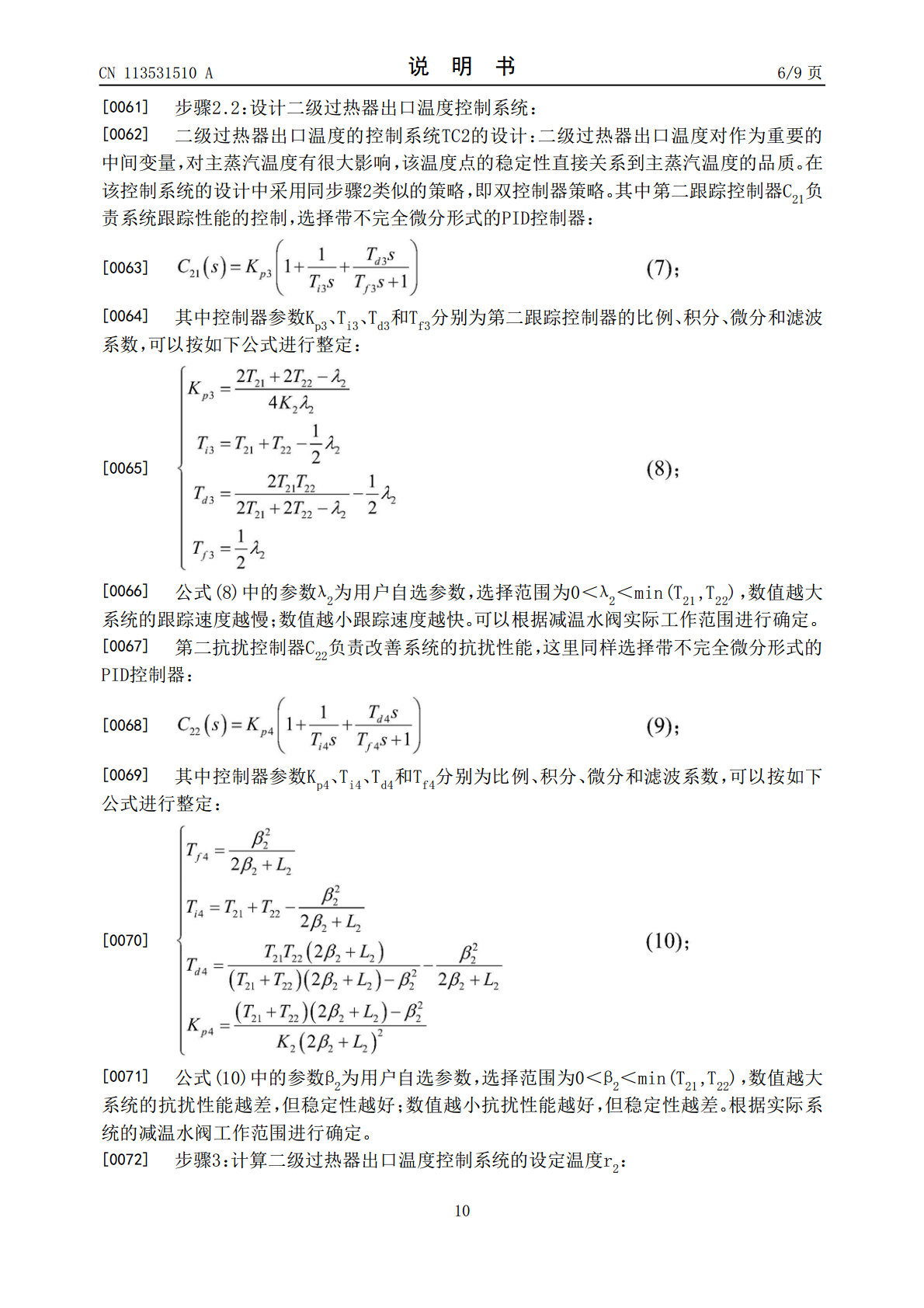
本发明公开了一种电站锅炉主蒸汽温度控制方法。本发明基于获取的模型分别设计二级过热器出口温度和三级过热器出口温度两个独立的温度控制系统,两个温度控制系统的温度设定值的温差同机组运行负荷成正比。在温度控制器的设计中考虑各自系统的跟踪性能和抗扰性能,分别设计相应的跟踪控制器和抗扰控制器,这样可以保证跟踪性能和抗扰性能能够分别得到独立的调节,避免两种性能相互干扰。本发明比传统的单回路控制和串级控制方法具有更好的跟踪性能和抗扰性能,可以实现在升降负荷过程中对主蒸汽温度需求的快速响应,并能够降低温度的波动,提高汽轮机
一种电站锅炉主蒸汽温度全程控制方法.pdf
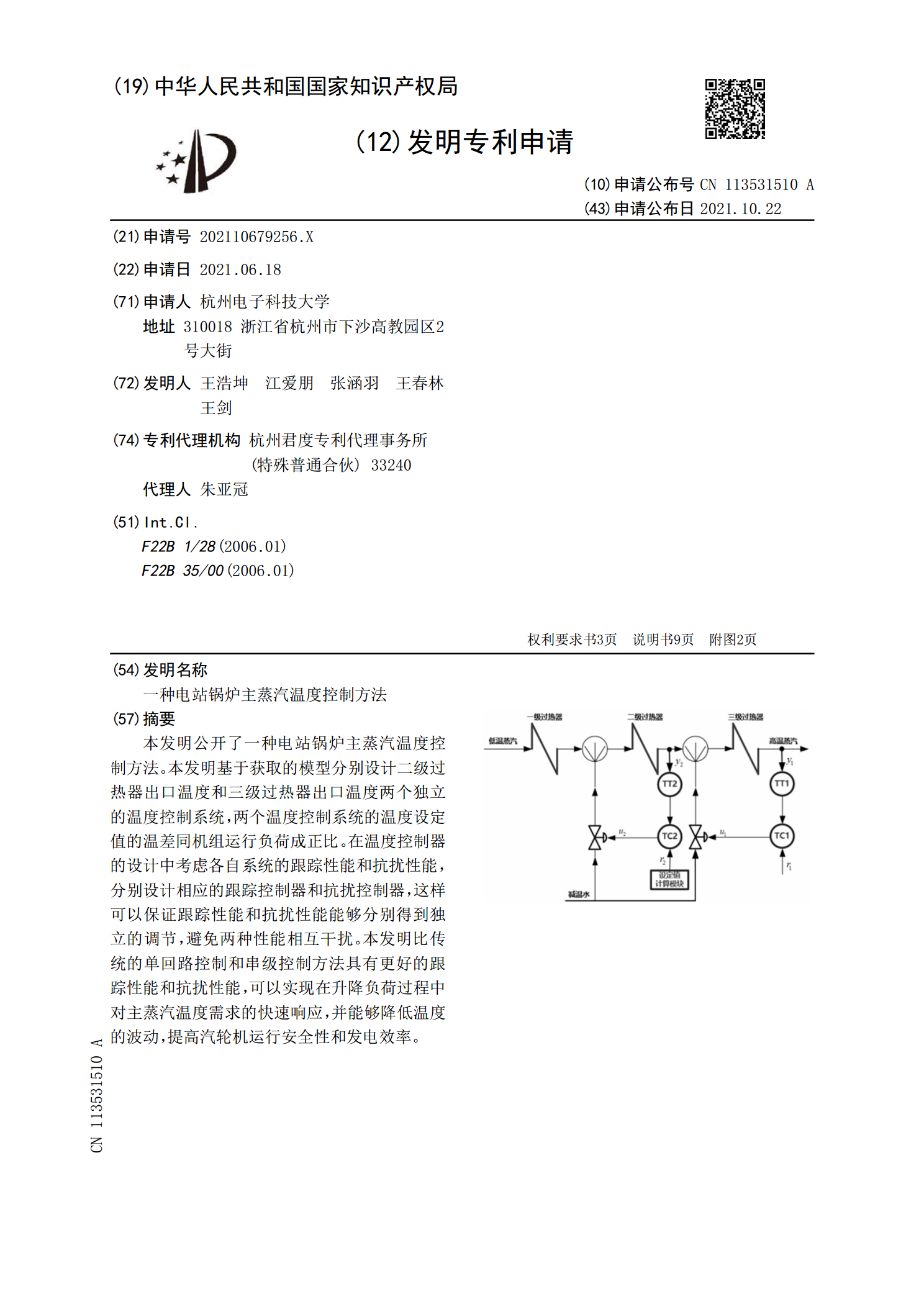
本发明公开了一种电站锅炉主蒸汽温度全程控制方法,其包括如下步骤:步骤一、划分电站锅炉运行的典型工况点;步骤二、测试典型工况点处的主蒸汽温度数学模型;步骤三、计算典型工况点处的PID可调参数的最优值;步骤四、在分散控制系统DCS中利用分段线性函数模块进行控制逻辑组态;步骤五、在分散控制系统DCS中实现主蒸汽温度在任意工况点的近似最优控制;本发明的有益效果是解决了火电机组主蒸汽温度系统在机组运行的全负荷范围内保证内、外回路PID可调参数的最优值的自动调度问题,大幅度地提高主蒸汽温度的调节品质,减少机组在负荷大

一种电站锅炉主蒸汽温度减温喷水控制方法及系统.pdf
本发明提供了一种电站锅炉主蒸汽温度减温喷水控制方法及系统,通过对主蒸汽温度偏差进行预处理得到预处理后的主蒸汽温度偏差,以预处理后的主蒸汽温度偏差为输入变量结合具有快速返回特性的微分算法计算获得主控制输出,将导前温度减去主控制输出的值得到导前温度控制偏差,副调PI控制器根据导前温度控制偏差输出副控制输出送到减温喷水调节阀进行控制,并且监测导前温度控制偏差,若导前温度控制偏差超过预设的阈值并持续预设的时间,则触发跟踪使能信号使得副调PI控制器的输出强制保持不变,并将主调PID控制器输出的主控制输出设置为导前温
锅炉主蒸汽温度控制系统以及方法.pdf
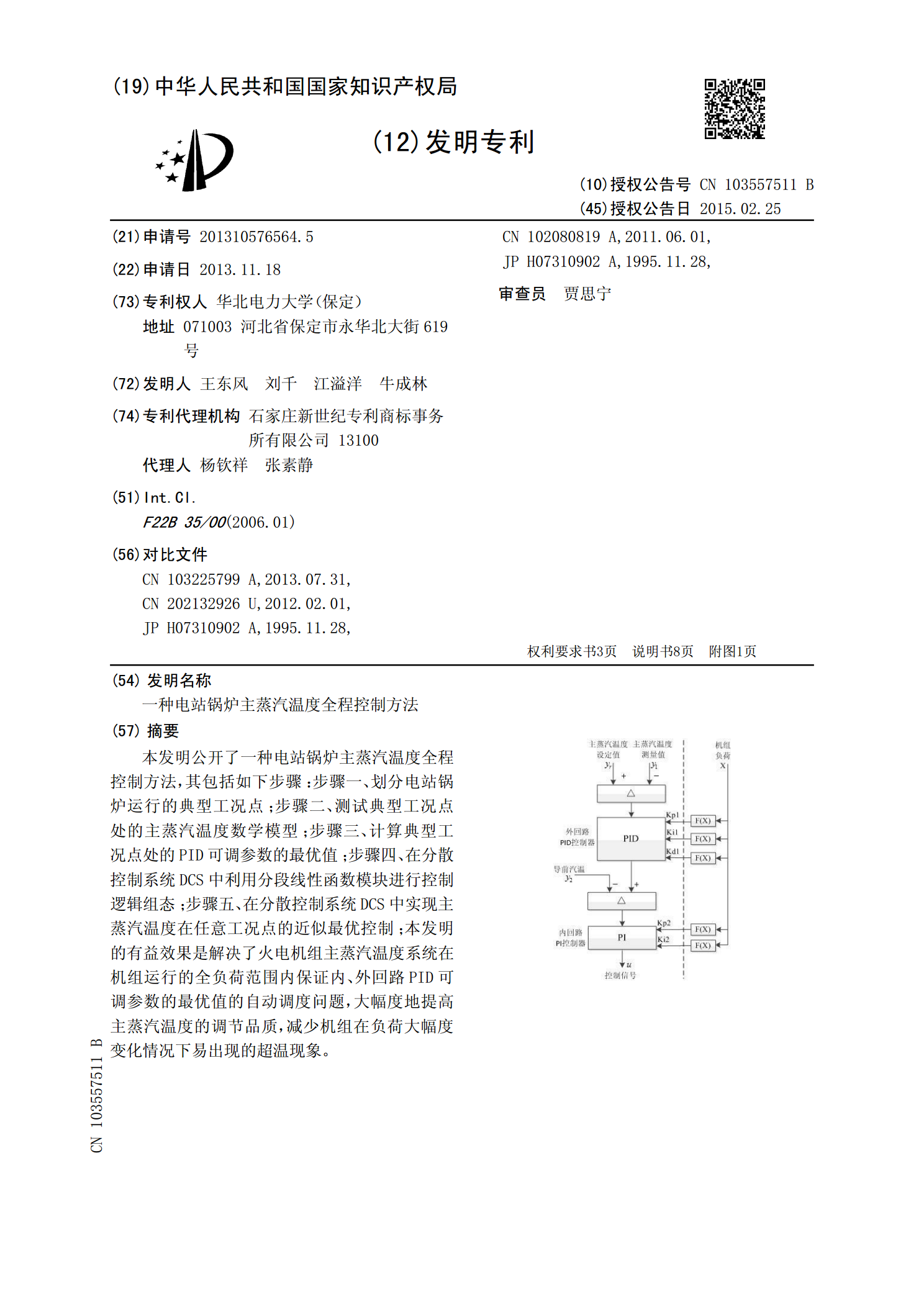
本发明公开了一种锅炉主蒸汽温度控制系统,包括依次相连的减温器以及过热器,减温器进汽管与锅炉蒸汽出口相连,过热器出汽管上连接有第一温度变送器,第一温度变送器与第一调节器相连,过热器进汽管上连接有第二温度变送器,第二温度变送器与第二调节器相连,第一调节器与第二调节器相连,减温器上连接有减温水管,减温水管上设置有电控阀,电控阀的执行器与第二调节器相连;锅炉主汽温度控制系统为PID串级控制,采用两级调节器,调节阀直接受第二调节器的控制,第二调节器的给定值受到第一调节器的控制,过热器出口蒸汽温度调节器的输出信号用来
锅炉主蒸汽温度控制系统.pdf
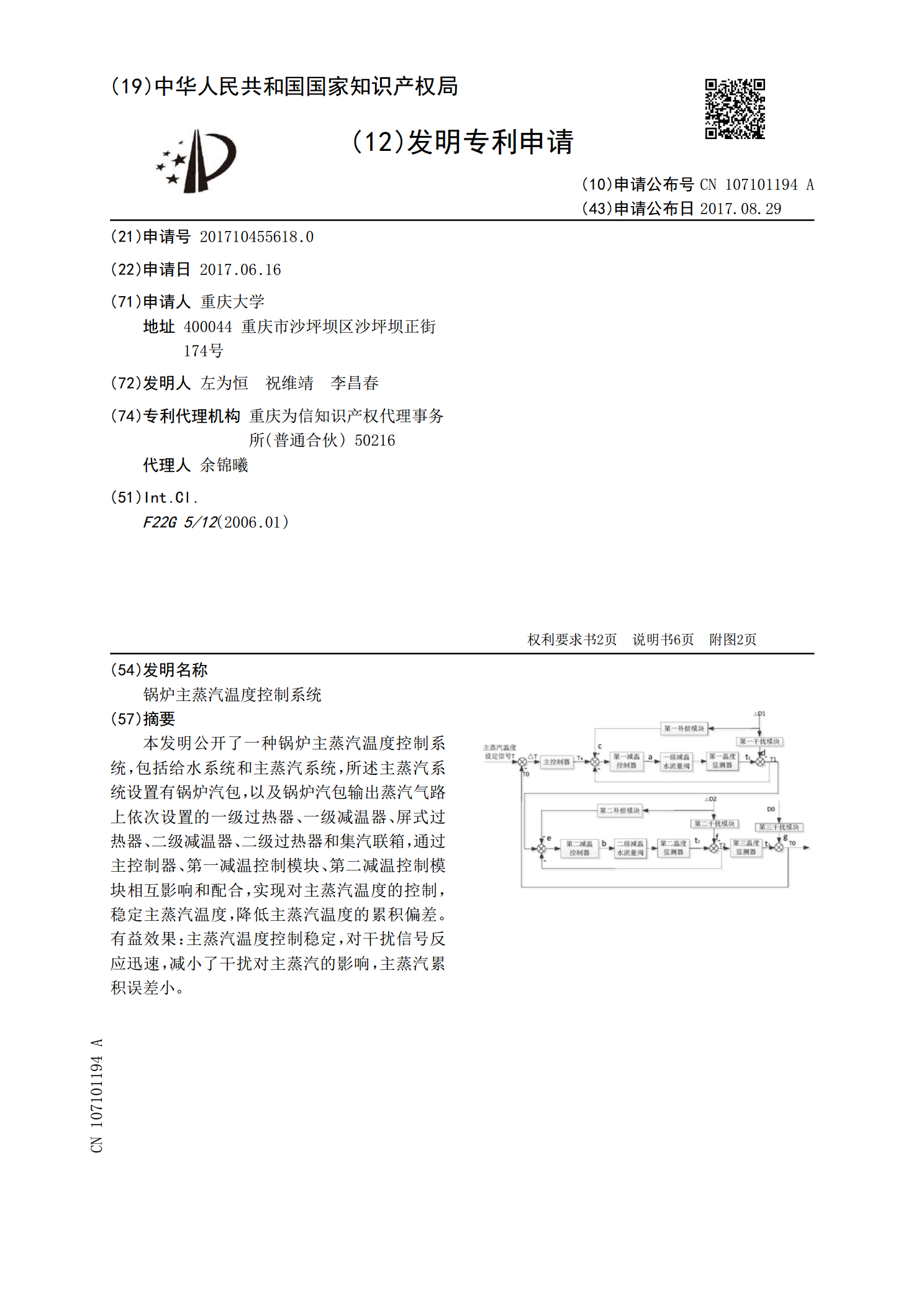
本发明公开了一种锅炉主蒸汽温度控制系统,包括给水系统和主蒸汽系统,所述主蒸汽系统设置有锅炉汽包,以及锅炉汽包输出蒸汽气路上依次设置的一级过热器、一级减温器、屏式过热器、二级减温器、二级过热器和集汽联箱,通过主控制器、第一减温控制模块、第二减温控制模块相互影响和配合,实现对主蒸汽温度的控制,稳定主蒸汽温度,降低主蒸汽温度的累积偏差。有益效果:主蒸汽温度控制稳定,对干扰信号反应迅速,减小了干扰对主蒸汽的影响,主蒸汽累积误差小。