
高炉探尺控制方法及装置、计算设备、存储介质.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

高炉探尺控制方法及装置、计算设备、存储介质.pdf
本发明实施例提供了一种高炉探尺控制方法及装置、计算设备、存储介质。该方法包括:确定扶尺力矩;获取所述高炉探尺的驱动电机的实时转速;根据所述实时转速确定所述高炉探尺的线速度,并根据所述线速度和预设的动态自适应系数确定第一补偿力矩;根据所述扶尺力矩和所述第一补偿力矩确定给定力矩,并根据所述给定力矩对所述高炉探尺进行控制,以使所述高炉探尺在到达料面后进行至少一次姿态调整,使得所述高炉探尺相对于竖直方向的倾角小于预设角度。本发明可以动态调整探尺在料面上的倾斜角度,进而提高料面的判断准确度。
高炉探尺运行控制方法.pdf
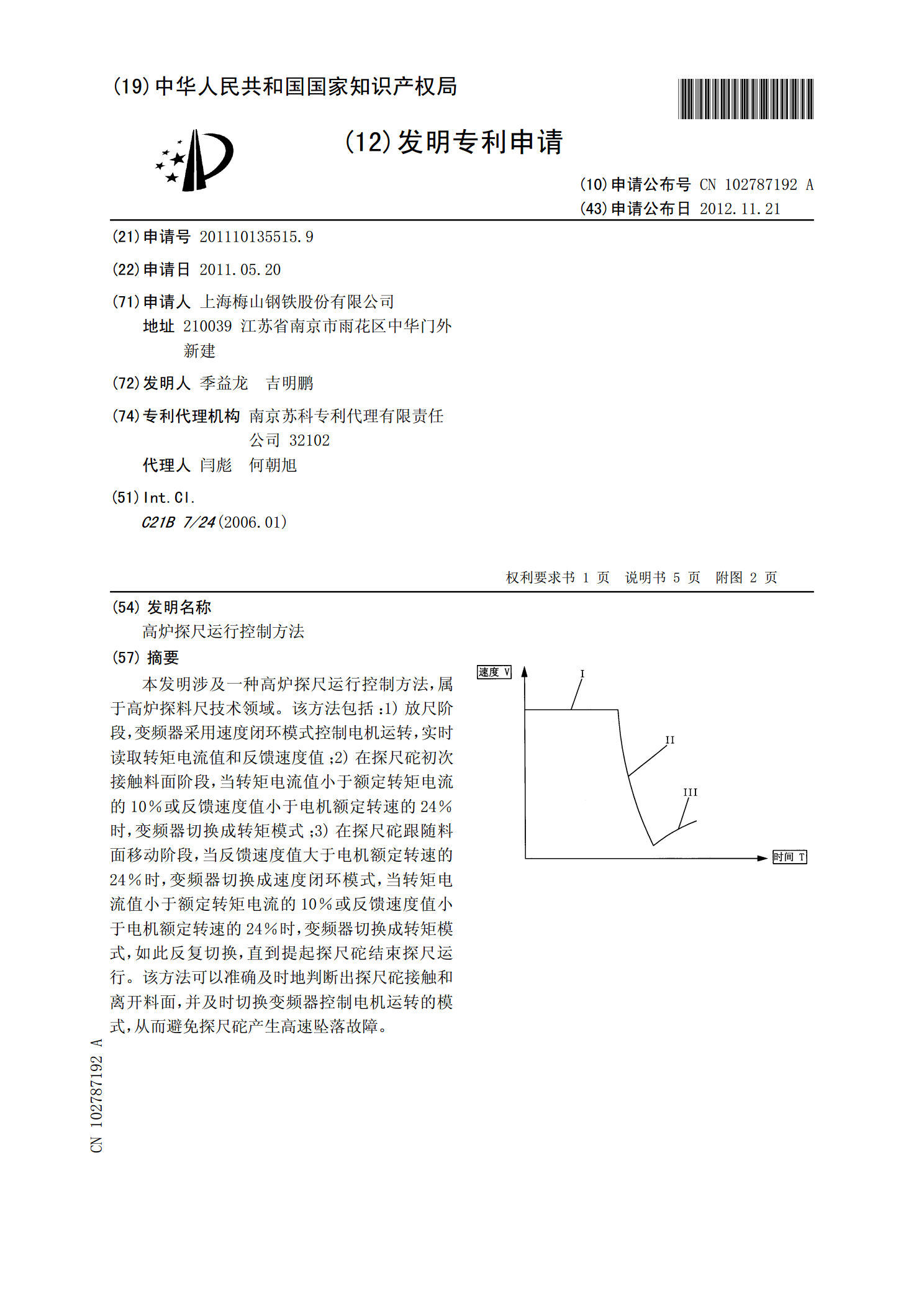
本发明涉及一种高炉探尺运行控制方法,属于高炉探料尺技术领域。该方法包括:1)放尺阶段,变频器采用速度闭环模式控制电机运转,实时读取转矩电流值和反馈速度值;2)在探尺砣初次接触料面阶段,当转矩电流值小于额定转矩电流的10%或反馈速度值小于电机额定转速的24%时,变频器切换成转矩模式;3)在探尺砣跟随料面移动阶段,当反馈速度值大于电机额定转速的24%时,变频器切换成速度闭环模式,当转矩电流值小于额定转矩电流的10%或反馈速度值小于电机额定转速的24%时,变频器切换成转矩模式,如此反复切换,直到提起探尺砣结束探
一种高炉铁口控制方法、装置、设备及存储介质.pdf
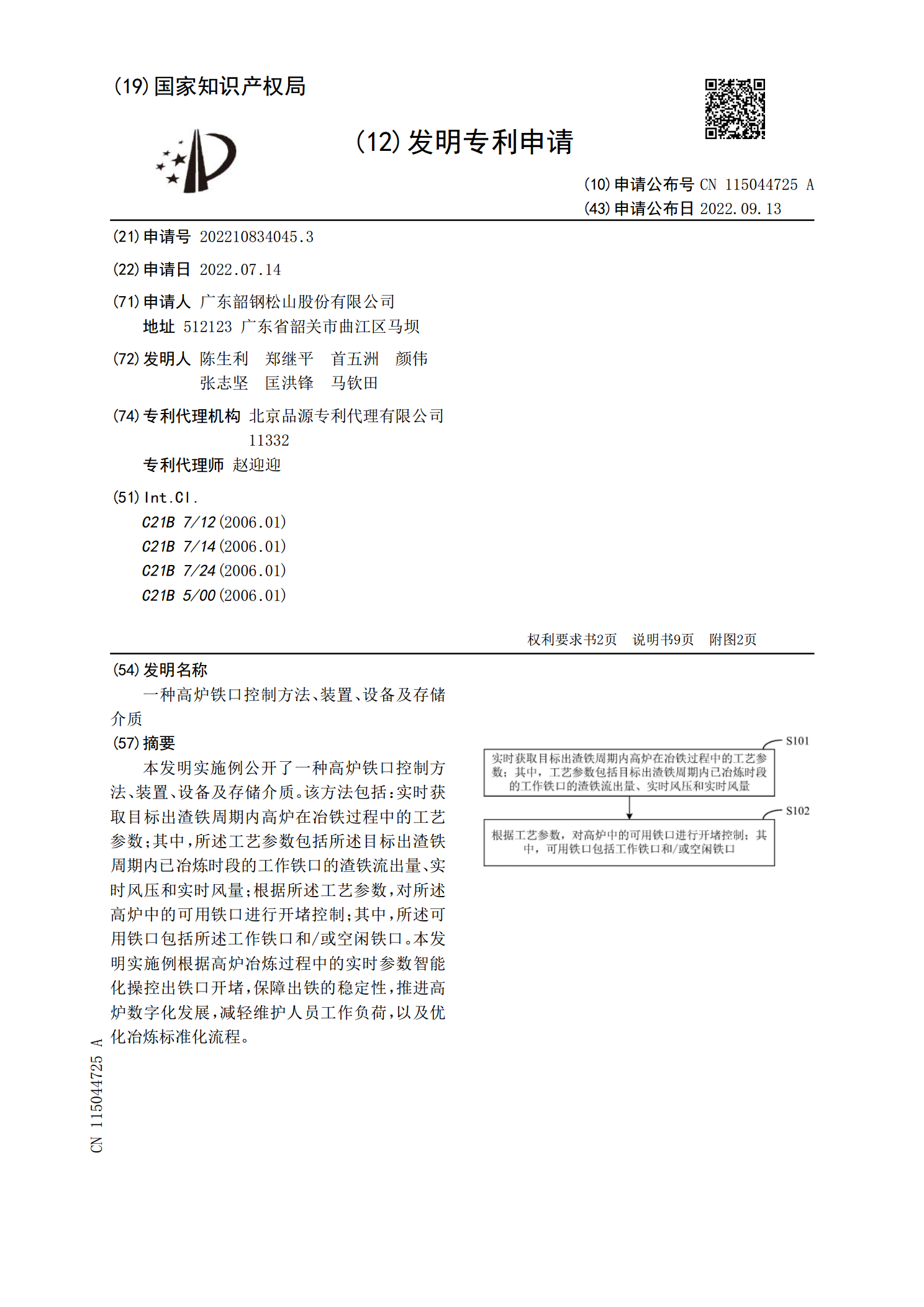
本发明实施例公开了一种高炉铁口控制方法、装置、设备及存储介质。该方法包括:实时获取目标出渣铁周期内高炉在冶铁过程中的工艺参数;其中,所述工艺参数包括所述目标出渣铁周期内已冶炼时段的工作铁口的渣铁流出量、实时风压和实时风量;根据所述工艺参数,对所述高炉中的可用铁口进行开堵控制;其中,所述可用铁口包括所述工作铁口和/或空闲铁口。本发明实施例根据高炉冶炼过程中的实时参数智能化操控出铁口开堵,保障出铁的稳定性,推进高炉数字化发展,减轻维护人员工作负荷,以及优化冶炼标准化流程。

高炉变料控制方法、装置及计算机可读存储介质.pdf
本发明公开了一种高炉变料控制方法、装置及计算机可读存储介质。该控制方法包括:获取高炉入炉焦炭负荷目标值、矿石总重量数据;获取高炉生产计划目标数据,根据高炉生产计划目标数据和矿石总重量数据确定入炉原料中的焦炭重量;根据料仓的分布情况和原料的计划使用范围确定矿石的入炉种类和入炉重量;根据炉料成分检测数据和目标二元碱度值,调整各类入炉原料的入炉重量。本发明实施例的技术方案通过确定入炉原料中的焦炭重量、矿石的入炉种类和入炉重量,根据炉料成分检测数据和目标二元碱度值,调整入炉原料的入炉重量,使入炉原料同时满足计划使
高炉探尺控制系统及方法.pdf
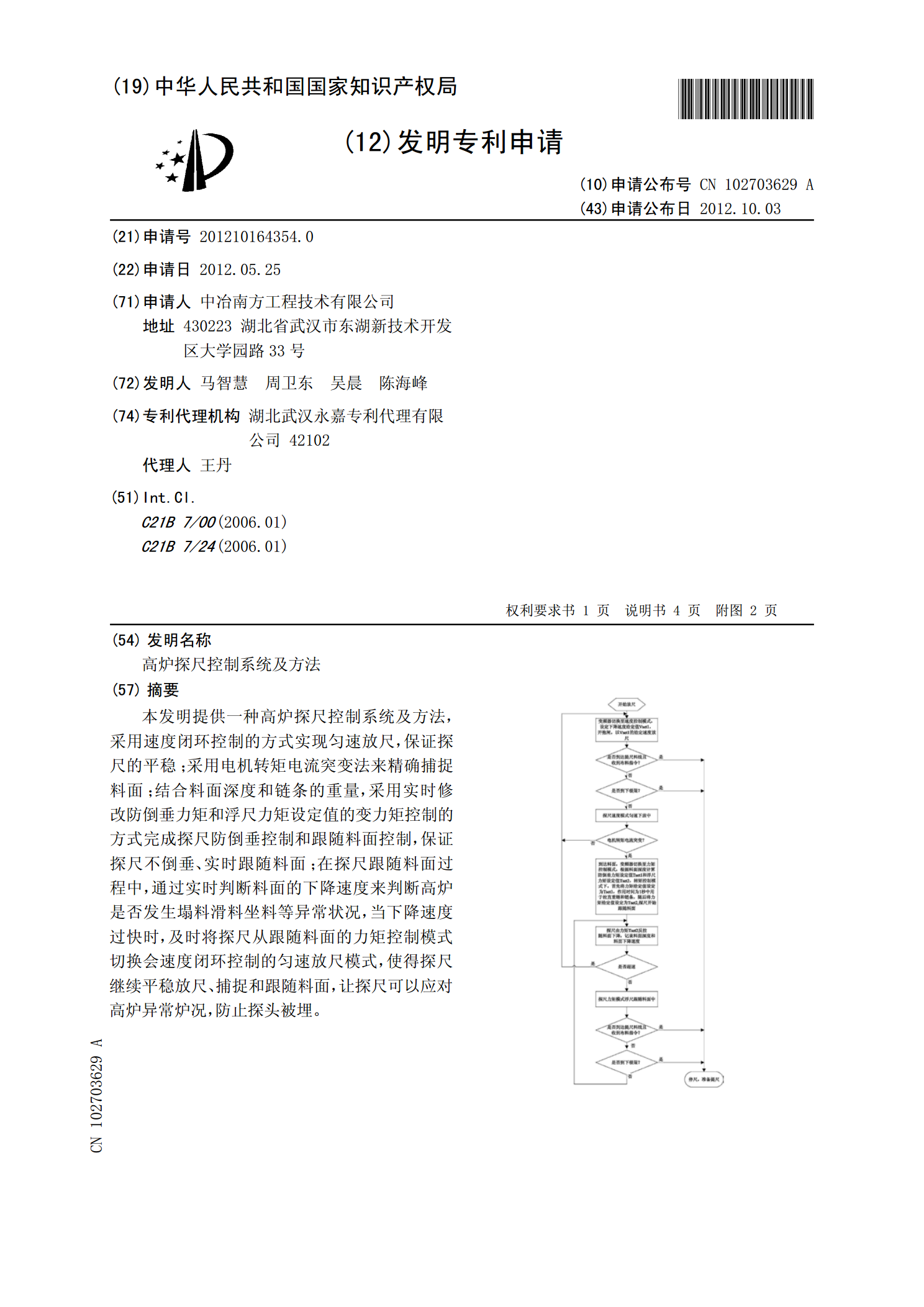
本发明提供一种高炉探尺控制系统及方法,采用速度闭环控制的方式实现匀速放尺,保证探尺的平稳;采用电机转矩电流突变法来精确捕捉料面;结合料面深度和链条的重量,采用实时修改防倒垂力矩和浮尺力矩设定值的变力矩控制的方式完成探尺防倒垂控制和跟随料面控制,保证探尺不倒垂、实时跟随料面;在探尺跟随料面过程中,通过实时判断料面的下降速度来判断高炉是否发生塌料滑料坐料等异常状况,当下降速度过快时,及时将探尺从跟随料面的力矩控制模式切换会速度闭环控制的匀速放尺模式,使得探尺继续平稳放尺、捕捉和跟随料面,让探尺可以应对高炉异常