
一种电石炉炉压自适应PID控制方法.pdf

Ke****67

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电石炉炉压自适应PID控制方法.pdf
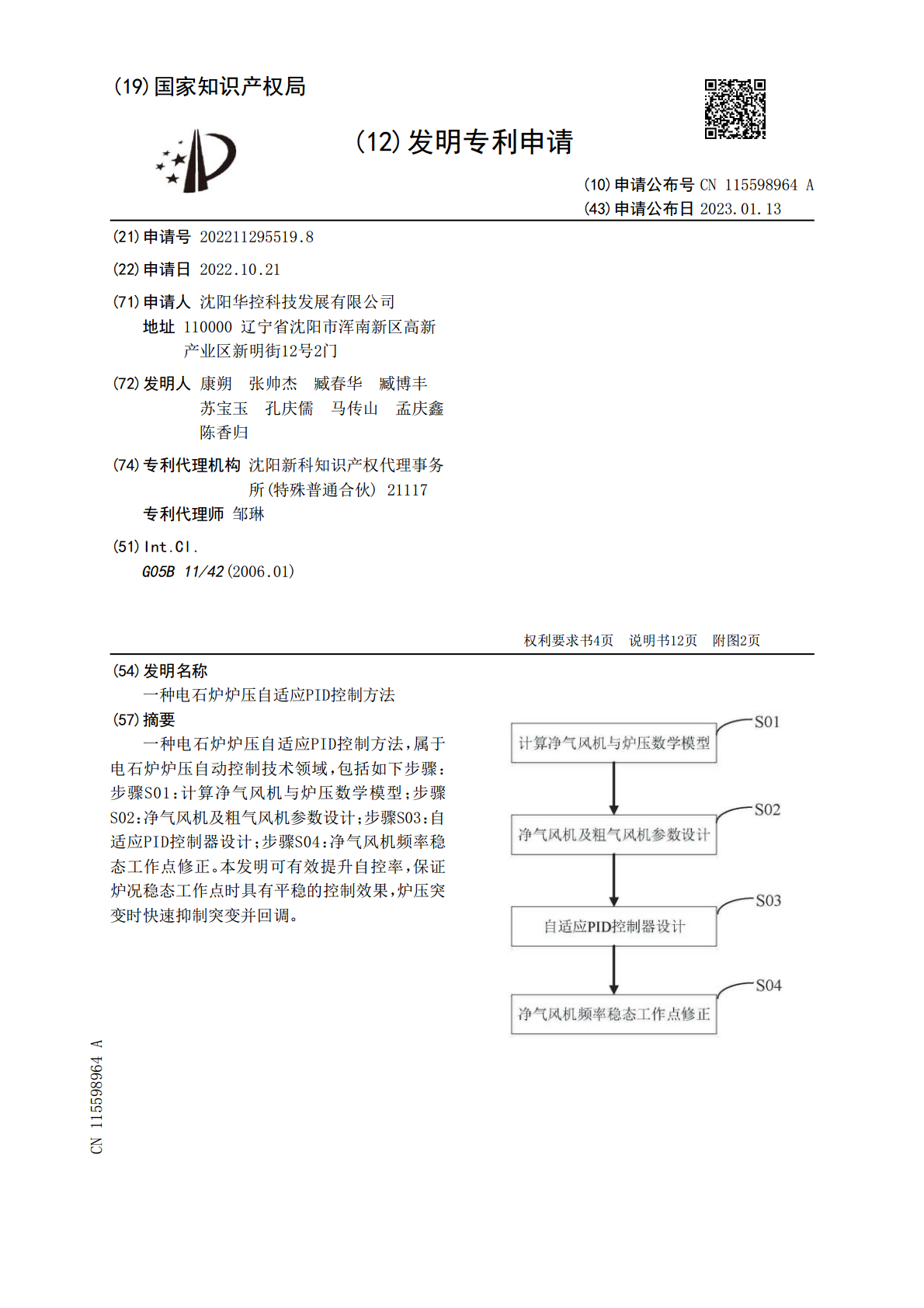
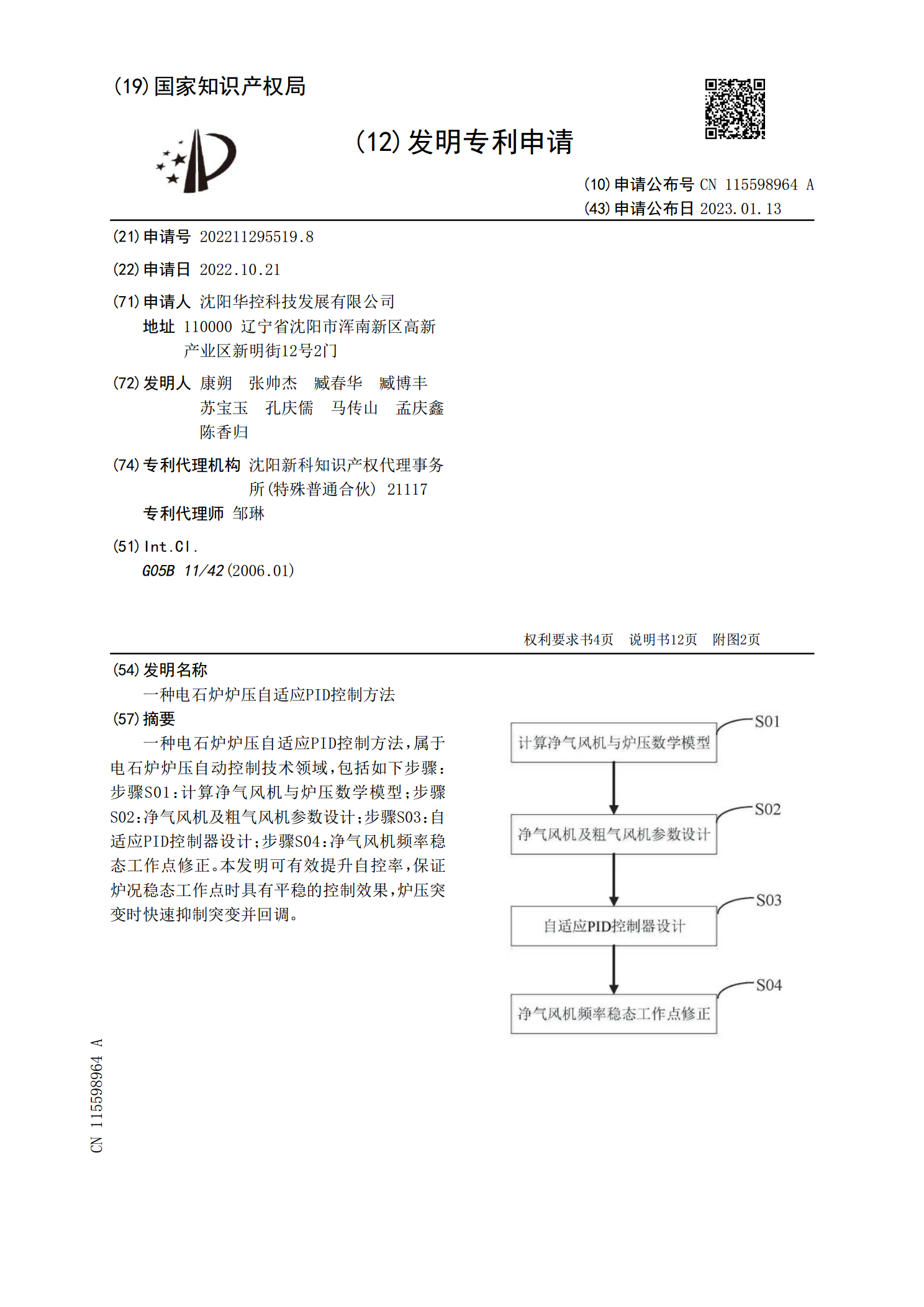
一种电石炉炉压自适应PID控制方法,属于电石炉炉压自动控制技术领域,包括如下步骤:步骤S01:计算净气风机与炉压数学模型;步骤S02:净气风机及粗气风机参数设计;步骤S03:自适应PID控制器设计;步骤S04:净气风机频率稳态工作点修正。本发明可有效提升自控率,保证炉况稳态工作点时具有平稳的控制效果,炉压突变时快速抑制突变并回调。
一种电石炉炉压控制方法.pdf
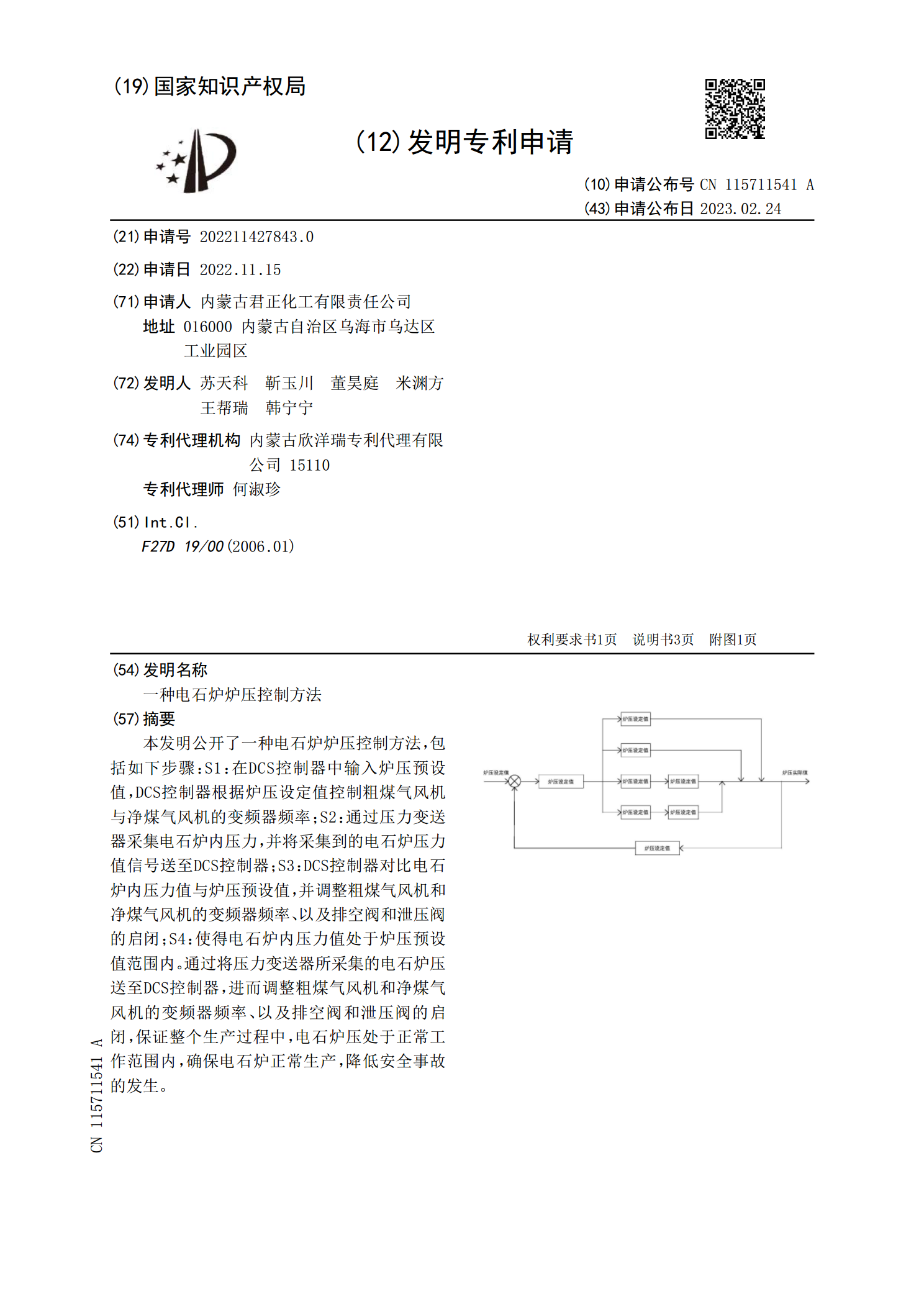
本发明公开了一种电石炉炉压控制方法,包括如下步骤:S1:在DCS控制器中输入炉压预设值,DCS控制器根据炉压设定值控制粗煤气风机与净煤气风机的变频器频率;S2:通过压力变送器采集电石炉内压力,并将采集到的电石炉压力值信号送至DCS控制器;S3:DCS控制器对比电石炉内压力值与炉压预设值,并调整粗煤气风机和净煤气风机的变频器频率、以及排空阀和泄压阀的启闭;S4:使得电石炉内压力值处于炉压预设值范围内。通过将压力变送器所采集的电石炉压送至DCS控制器,进而调整粗煤气风机和净煤气风机的变频器频率、以及排空阀和泄
电石炉炉压智能化运行控制方法.pdf
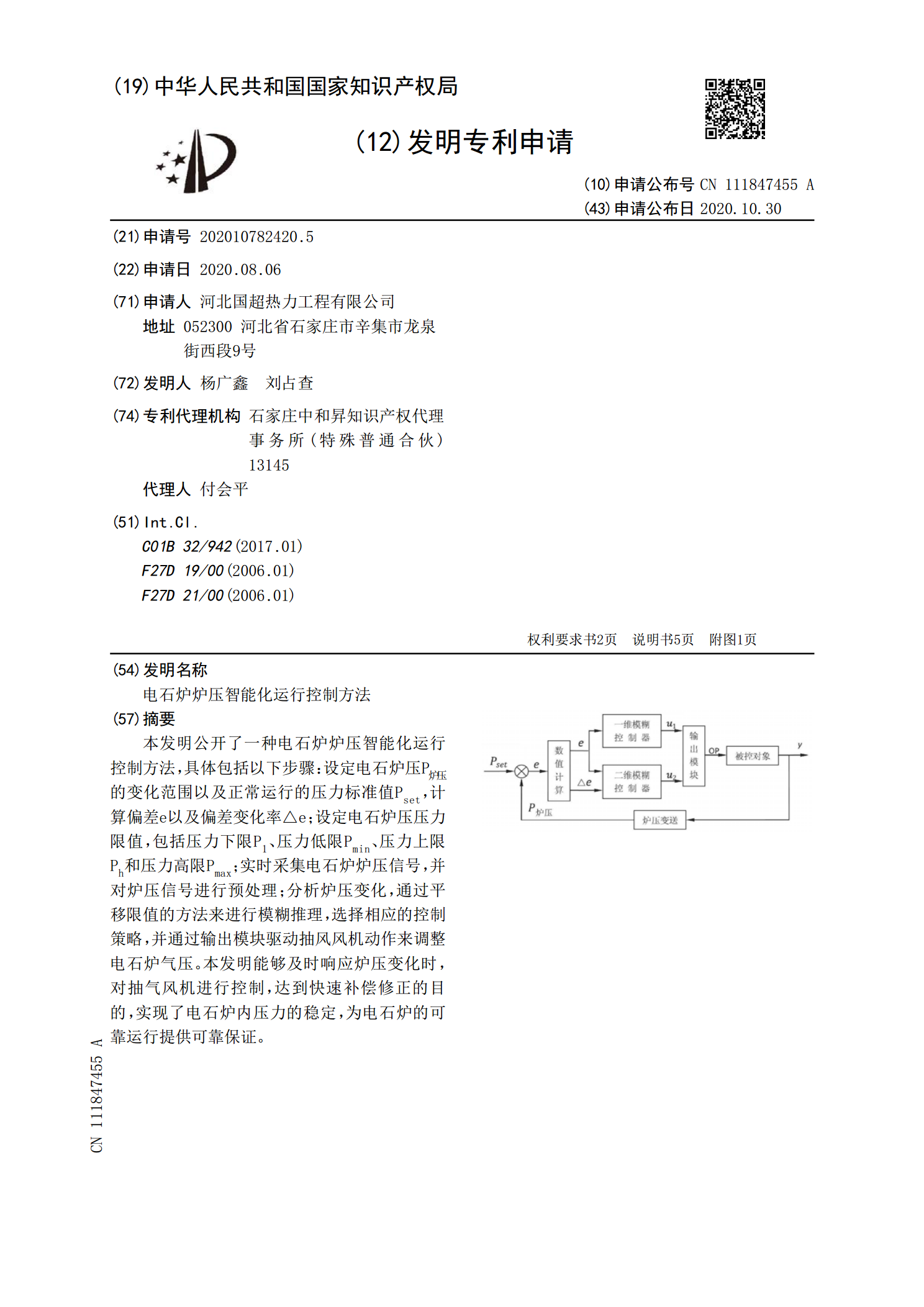
本发明公开了一种电石炉炉压智能化运行控制方法,具体包括以下步骤:设定电石炉压P
电石炉及电石炉的焙烧方法.pdf
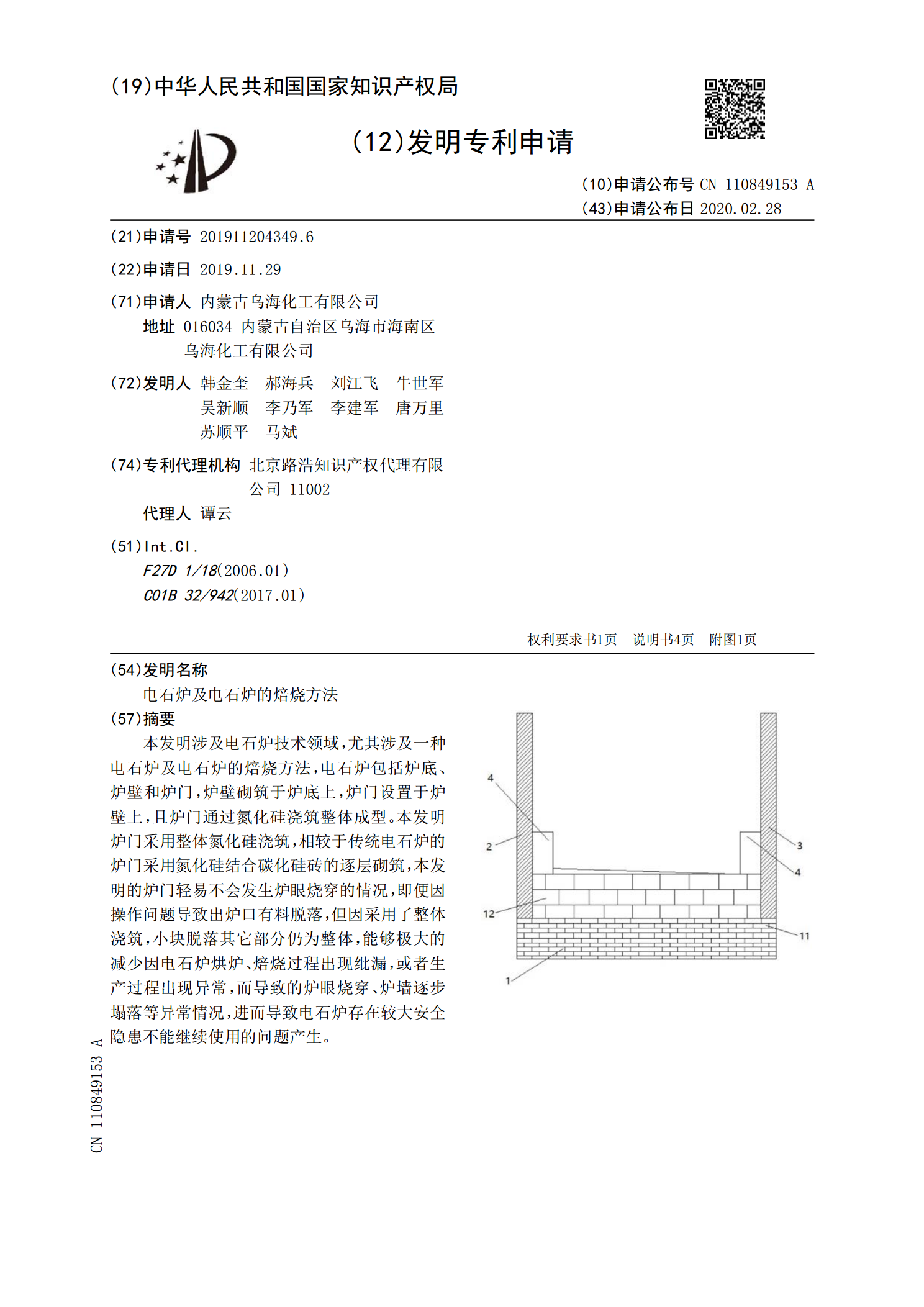
本发明涉及电石炉技术领域,尤其涉及一种电石炉及电石炉的焙烧方法,电石炉包括炉底、炉壁和炉门,炉壁砌筑于炉底上,炉门设置于炉壁上,且炉门通过氮化硅浇筑整体成型。本发明炉门采用整体氮化硅浇筑,相较于传统电石炉的炉门采用氮化硅结合碳化硅砖的逐层砌筑,本发明的炉门轻易不会发生炉眼烧穿的情况,即便因操作问题导致出炉口有料脱落,但因采用了整体浇筑,小块脱落其它部分仍为整体,能够极大的减少因电石炉烘炉、焙烧过程出现纰漏,或者生产过程出现异常,而导致的炉眼烧穿、炉墙逐步塌落等异常情况,进而导致电石炉存在较大安全隐患不能继
一种电石炉炉嘴及电石炉.pdf
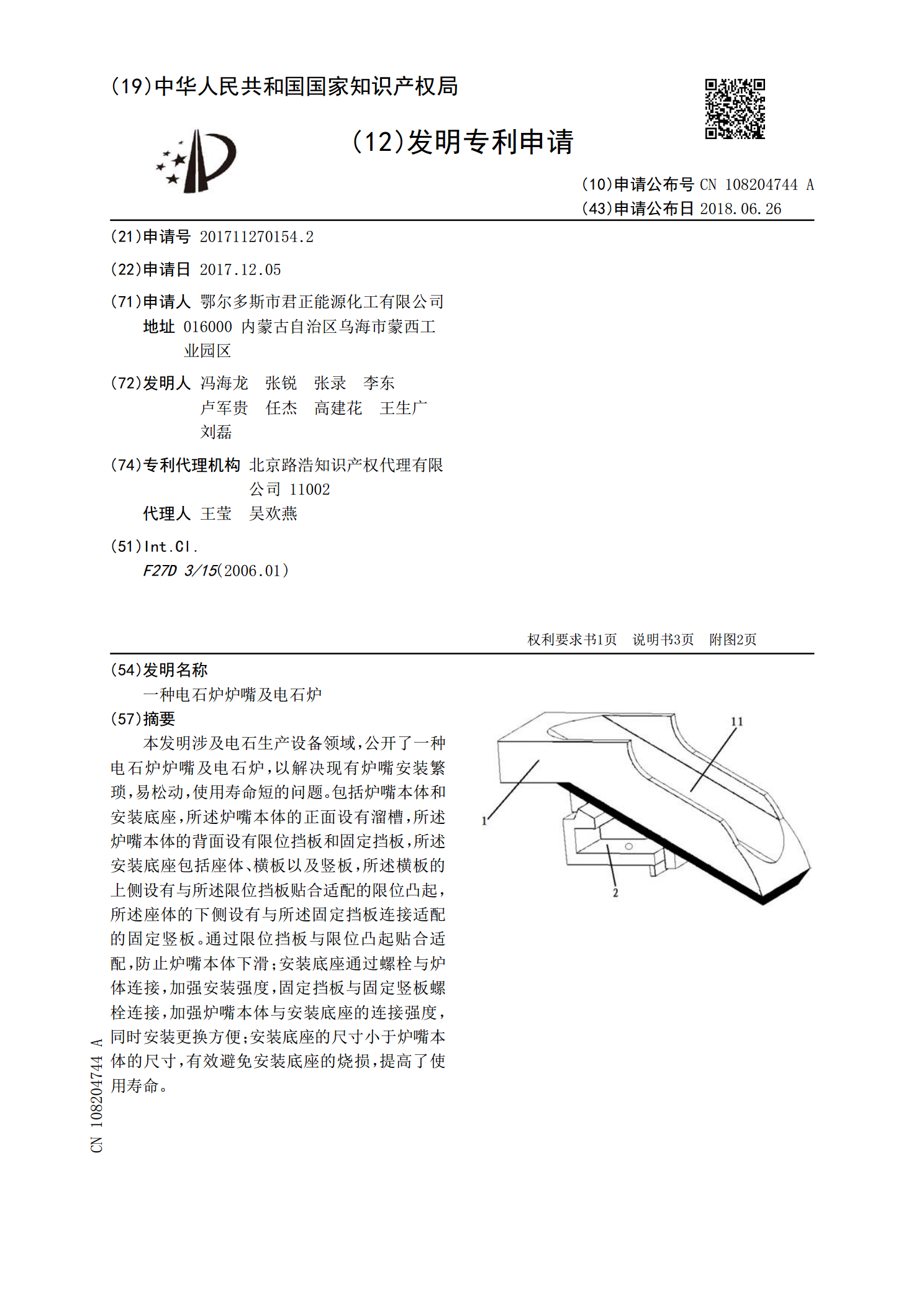
本发明涉及电石生产设备领域,公开了一种电石炉炉嘴及电石炉,以解决现有炉嘴安装繁琐,易松动,使用寿命短的问题。包括炉嘴本体和安装底座,所述炉嘴本体的正面设有溜槽,所述炉嘴本体的背面设有限位挡板和固定挡板,所述安装底座包括座体、横板以及竖板,所述横板的上侧设有与所述限位挡板贴合适配的限位凸起,所述座体的下侧设有与所述固定挡板连接适配的固定竖板。通过限位挡板与限位凸起贴合适配,防止炉嘴本体下滑;安装底座通过螺栓与炉体连接,加强安装强度,固定挡板与固定竖板螺栓连接,加强炉嘴本体与安装底座的连接强度,同时安装更换方