
一种多功能腊肉加工用气化炉及其控制方法.pdf

一只****生物

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多功能腊肉加工用气化炉及其控制方法.pdf
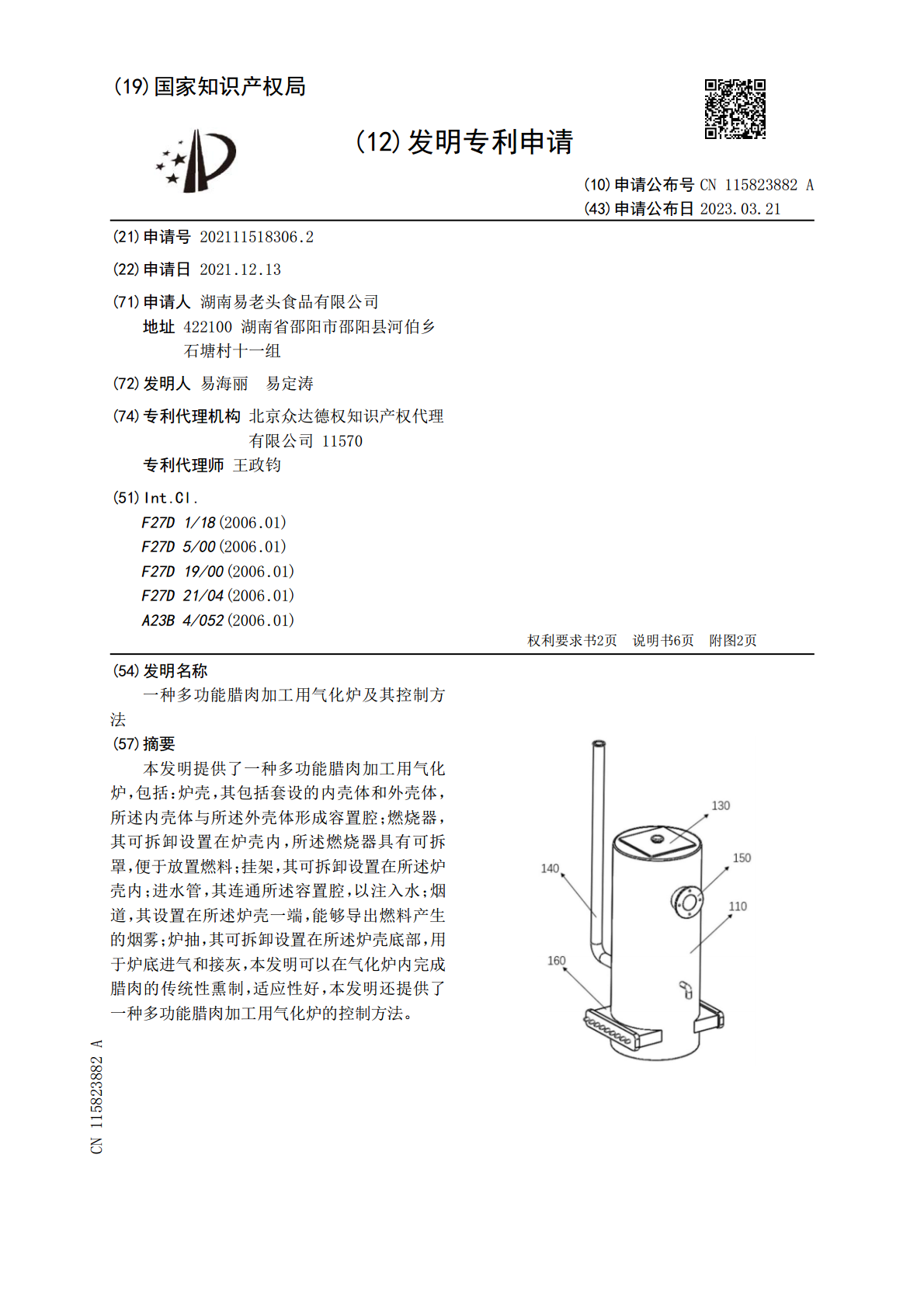
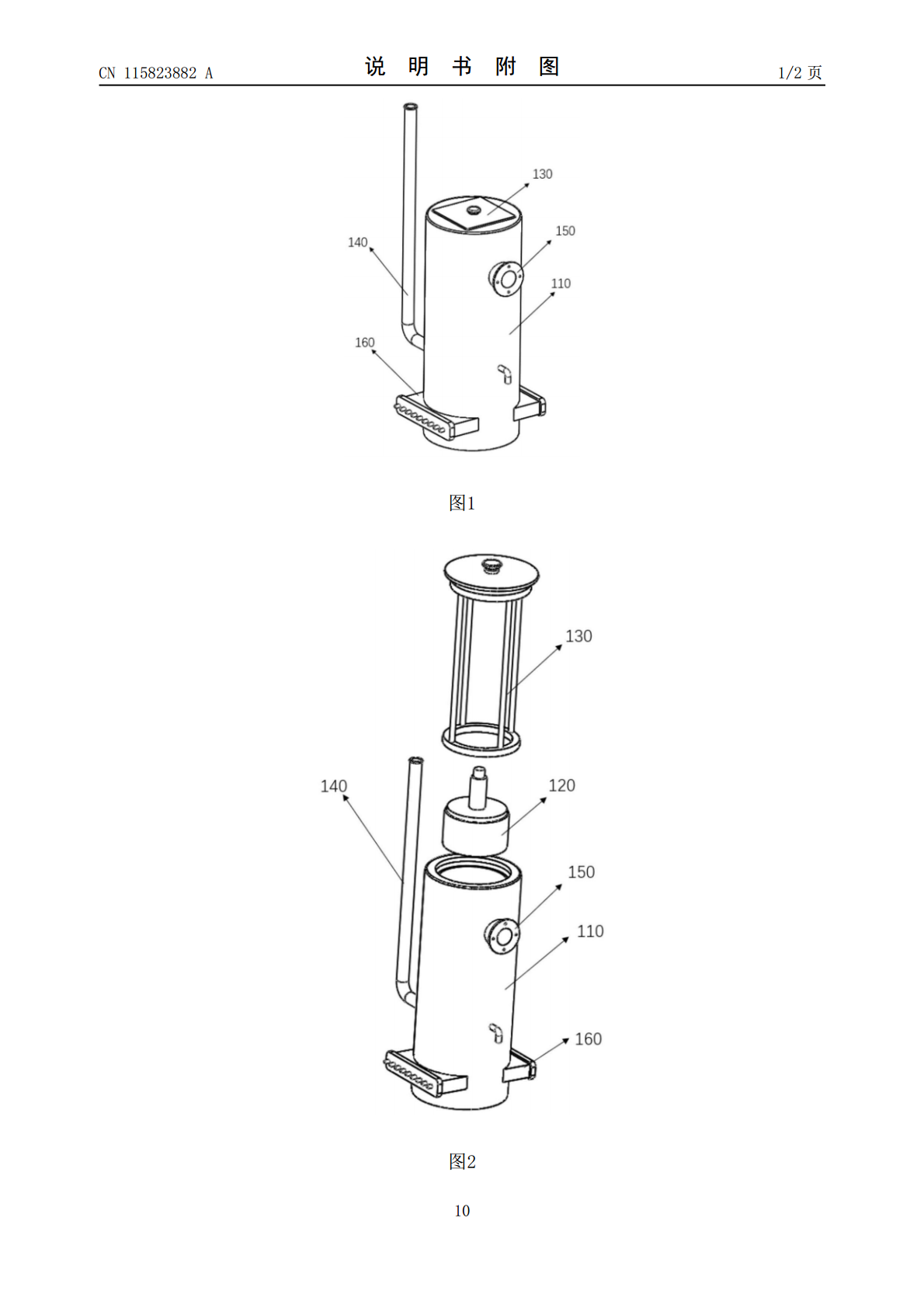
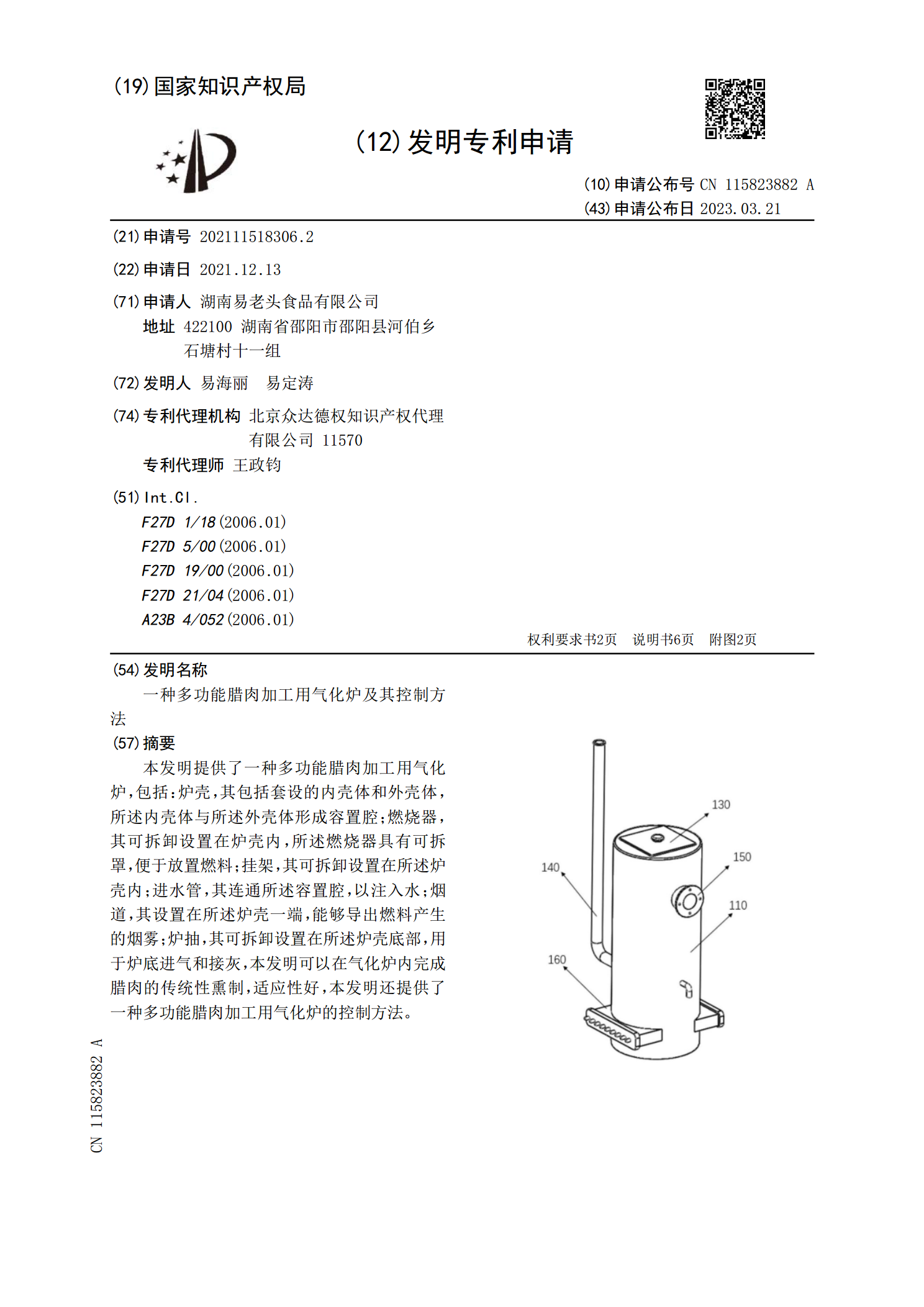
本发明提供了一种多功能腊肉加工用气化炉,包括:炉壳,其包括套设的内壳体和外壳体,所述内壳体与所述外壳体形成容置腔;燃烧器,其可拆卸设置在炉壳内,所述燃烧器具有可拆罩,便于放置燃料;挂架,其可拆卸设置在所述炉壳内;进水管,其连通所述容置腔,以注入水;烟道,其设置在所述炉壳一端,能够导出燃料产生的烟雾;炉抽,其可拆卸设置在所述炉壳底部,用于炉底进气和接灰,本发明可以在气化炉内完成腊肉的传统性熏制,适应性好,本发明还提供了一种多功能腊肉加工用气化炉的控制方法。
一种腊肉风干箱及其腊肉风干方法.pdf
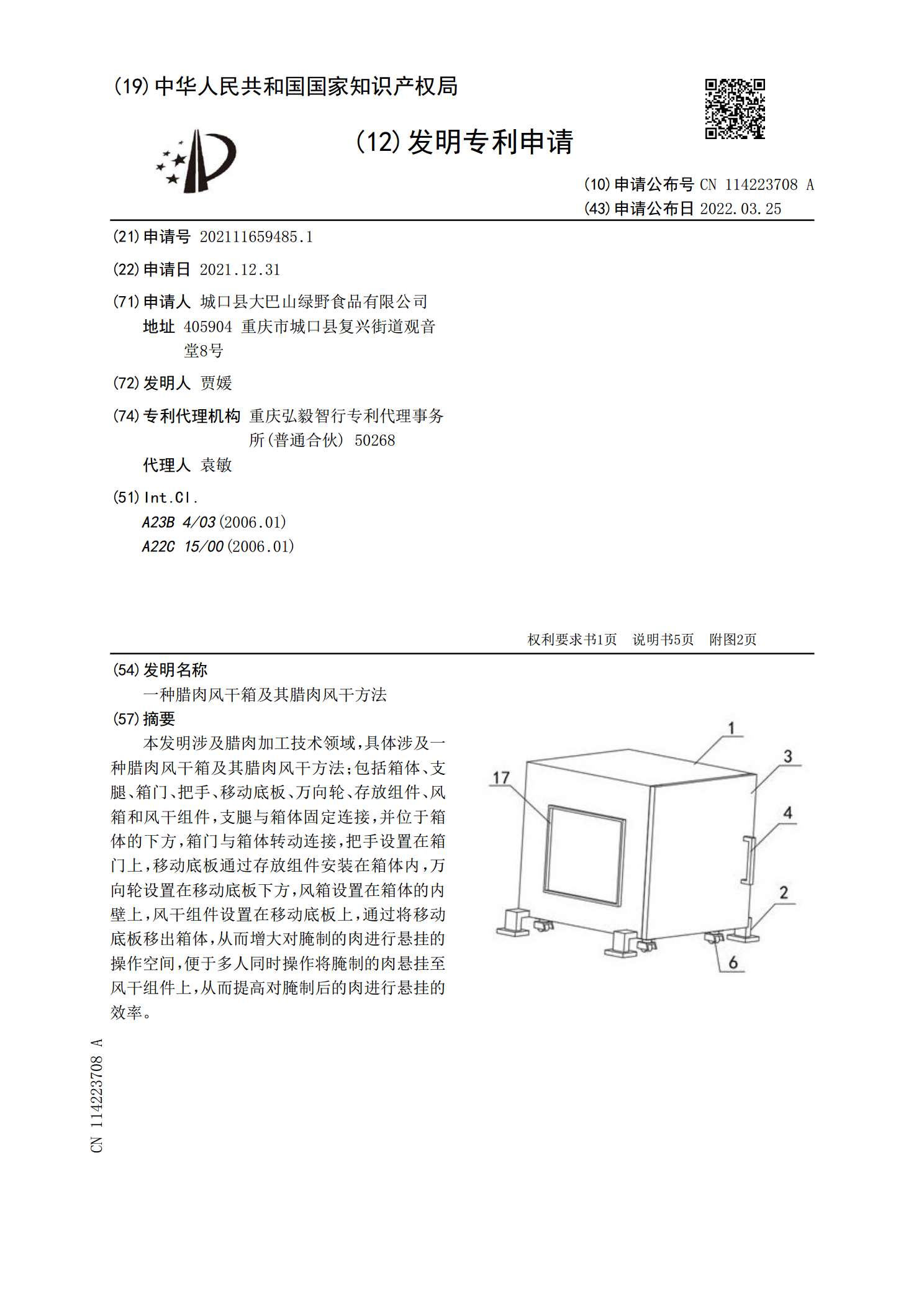
本发明涉及腊肉加工技术领域,具体涉及一种腊肉风干箱及其腊肉风干方法;包括箱体、支腿、箱门、把手、移动底板、万向轮、存放组件、风箱和风干组件,支腿与箱体固定连接,并位于箱体的下方,箱门与箱体转动连接,把手设置在箱门上,移动底板通过存放组件安装在箱体内,万向轮设置在移动底板下方,风箱设置在箱体的内壁上,风干组件设置在移动底板上,通过将移动底板移出箱体,从而增大对腌制的肉进行悬挂的操作空间,便于多人同时操作将腌制的肉悬挂至风干组件上,从而提高对腌制后的肉进行悬挂的效率。
一种气化炉及其控制方法.pdf
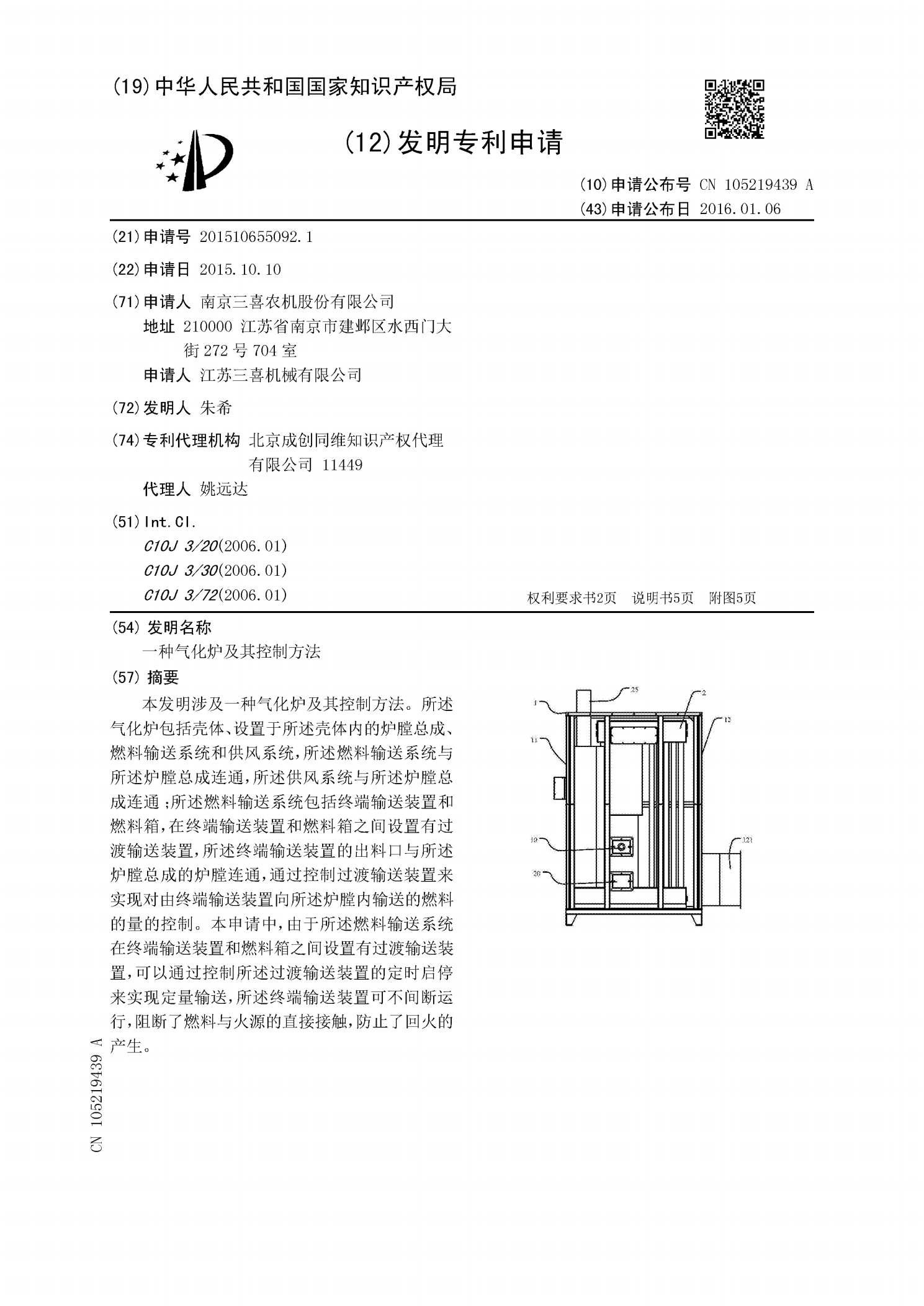
本发明涉及一种气化炉及其控制方法。所述气化炉包括壳体、设置于所述壳体内的炉膛总成、燃料输送系统和供风系统,所述燃料输送系统与所述炉膛总成连通,所述供风系统与所述炉膛总成连通;所述燃料输送系统包括终端输送装置和燃料箱,在终端输送装置和燃料箱之间设置有过渡输送装置,所述终端输送装置的出料口与所述炉膛总成的炉膛连通,通过控制过渡输送装置来实现对由终端输送装置向所述炉膛内输送的燃料的量的控制。本申请中,由于所述燃料输送系统在终端输送装置和燃料箱之间设置有过渡输送装置,可以通过控制所述过渡输送装置的定时启停来实现定

一种腊肉及其制备方法.pdf
本发明涉及腊肉制备技术领域,尤其是一种腊肉及其制备方法,经过猪肉切条,并控制条的重量,结合食盐量、花椒量的控制,使得腌制后的猪肉条的品质较优,并经过翻动处理,使得吸附在猪肉条表面的食盐、花椒以及其他成分进入水中,并结合小花青风藤叶浆液的倒入浸泡,使得肉条上的有害成分大幅度的降低;并且结合风吹、熏制过程采用甘蔗根茎叶和金刚树根茎叶混合作为燃料燃烧的烟处理,使得制备的腊肉的有害残留物大幅度的降低,相对传统的腊肉制备过程中,烟熏残留有害物减少了87%以上,极大程度的改善了腊肉的品质,而且避免了对烟气进行过滤处理
一种智能气化炉及其控制方法.pdf
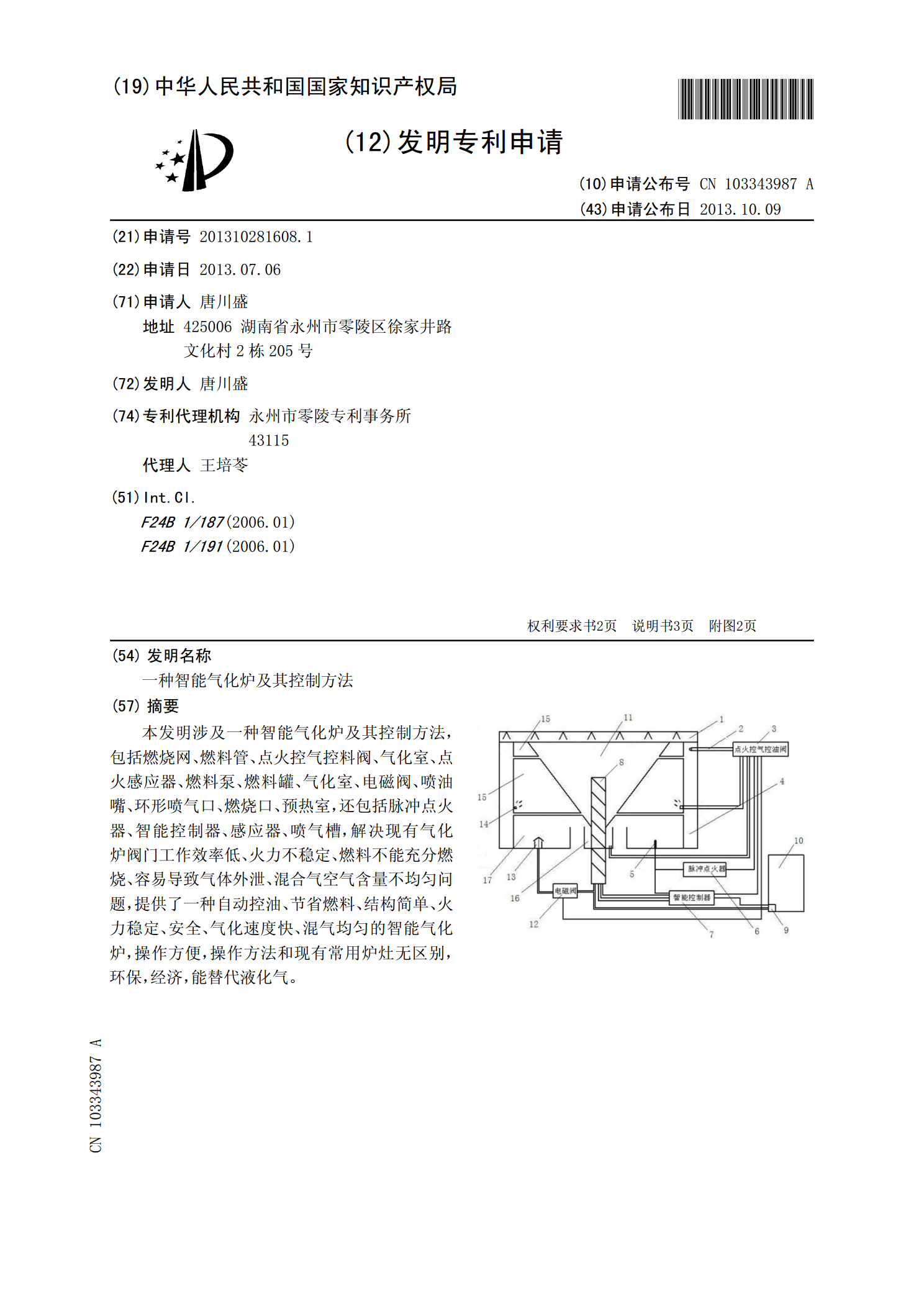
本发明涉及一种智能气化炉及其控制方法,包括燃烧网、燃料管、点火控气控料阀、气化室、点火感应器、燃料泵、燃料罐、气化室、电磁阀、喷油嘴、环形喷气口、燃烧口、预热室,还包括脉冲点火器、智能控制器、感应器、喷气槽,解决现有气化炉阀门工作效率低、火力不稳定、燃料不能充分燃烧、容易导致气体外泄、混合气空气含量不均匀问题,提供了一种自动控油、节省燃料、结构简单、火力稳定、安全、气化速度快、混气均匀的智能气化炉,操作方便,操作方法和现有常用炉灶无区别,环保,经济,能替代液化气。