
一种实时构建实训数字孪生模型的方法.pdf

是你****芹呀


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种实时构建实训数字孪生模型的方法.pdf
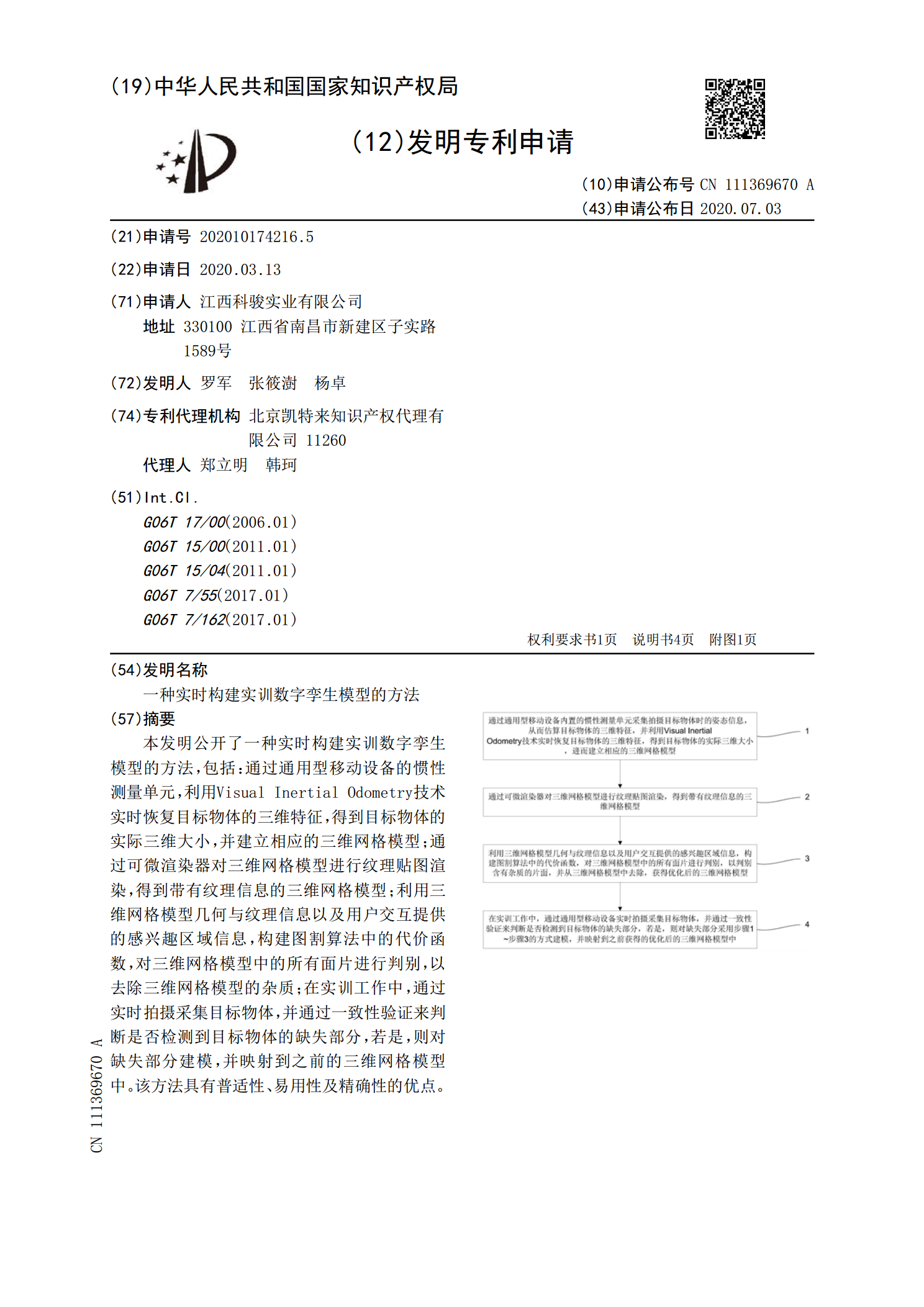
本发明公开了一种实时构建实训数字孪生模型的方法,包括:通过通用型移动设备的惯性测量单元,利用VisualInertialOdometry技术实时恢复目标物体的三维特征,得到目标物体的实际三维大小,并建立相应的三维网格模型;通过可微渲染器对三维网格模型进行纹理贴图渲染,得到带有纹理信息的三维网格模型;利用三维网格模型几何与纹理信息以及用户交互提供的感兴趣区域信息,构建图割算法中的代价函数,对三维网格模型中的所有面片进行判别,以去除三维网格模型的杂质;在实训工作中,通过实时拍摄采集目标物体,并通过一致性验
一种建筑能源数字孪生模型的构建方法及系统.pdf
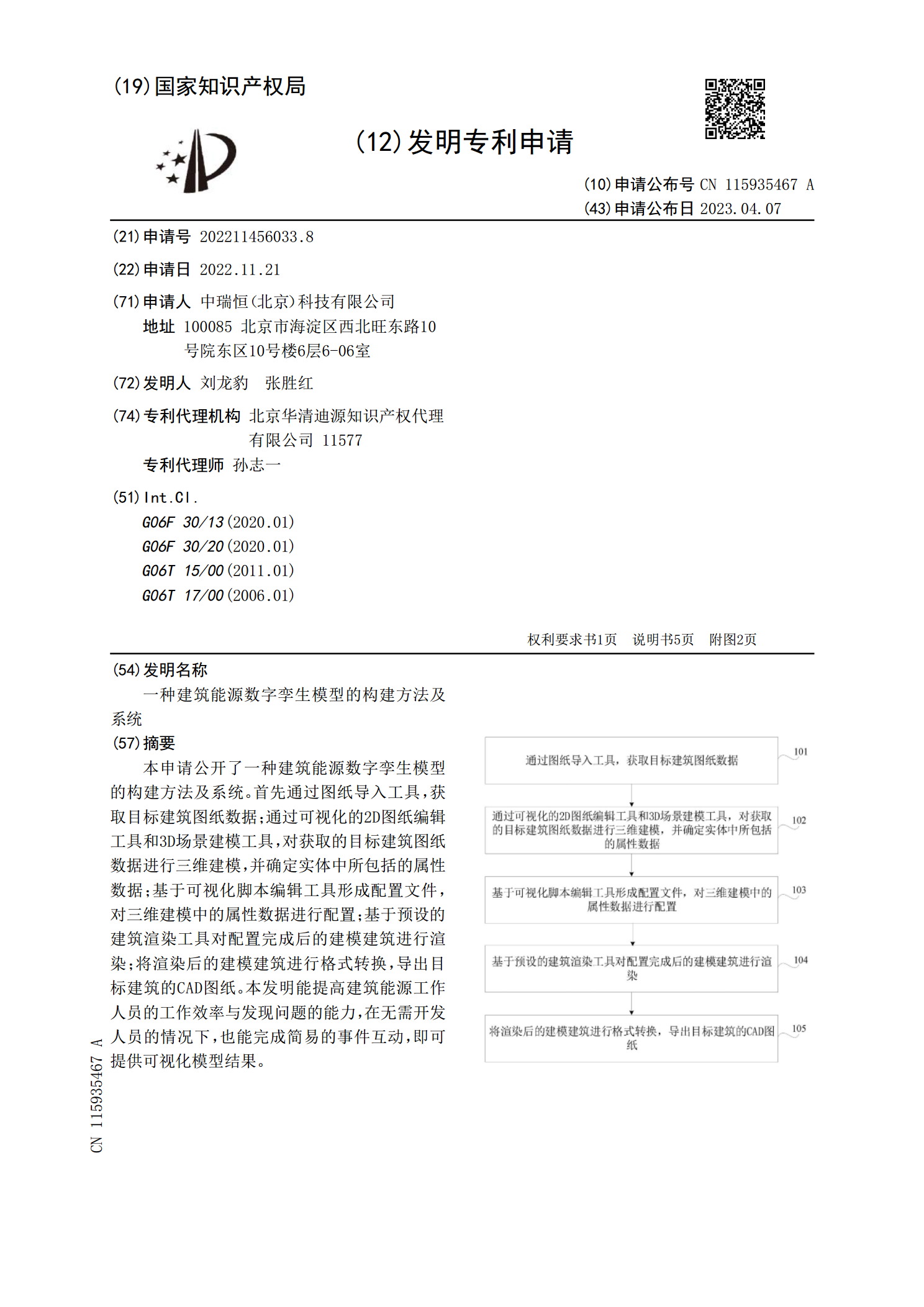
本申请公开了一种建筑能源数字孪生模型的构建方法及系统。首先通过图纸导入工具,获取目标建筑图纸数据;通过可视化的2D图纸编辑工具和3D场景建模工具,对获取的目标建筑图纸数据进行三维建模,并确定实体中所包括的属性数据;基于可视化脚本编辑工具形成配置文件,对三维建模中的属性数据进行配置;基于预设的建筑渲染工具对配置完成后的建模建筑进行渲染;将渲染后的建模建筑进行格式转换,导出目标建筑的CAD图纸。本发明能提高建筑能源工作人员的工作效率与发现问题的能力,在无需开发人员的情况下,也能完成简易的事件互动,即可提供可视

一种燃煤发电设备数字孪生模型构建方法.pdf
本发明公开了一种燃煤发电设备数字孪生模型构建方法,包括的步骤如下:步骤1,构建可计算的数据模型,采用多源数据融合和深度学习算法,实现物理空间与虚拟空间信息流、控制流﹑数据流和决策流的数据融合及迭代优化,步骤2,引入电厂测量的缺陷数据,求解数字孪生体模型,允许控制系统调整设定点的参数。本发明通过利用本方法,明确了数字孪生在不同应用场景下的模型构建要素,规范了数字孪生模型构建流程,减少了因应用场景不明确、建模方法不明确导致的效率损失,量化了补偿效率损失的额外燃煤量,电厂的数字孪生体还能够为其他系统工程师提供有

一种基于MBD工序模型的工件几何数字孪生模型的构建方法.pdf
本发明公开了一种基于MBD工序模型的工件几何数字孪生模型的构建方法,基于MBD工序模型中的CAD模型和工艺信息,通过三维测量获得工件实际几何形状,通过点云初配准、工艺引导点云分割获取理想加工面、理想加工基准面、实际加工面与实际加工基准面,以实际与理想的加工基准面重合为约束进行精配准,从而矫正三维测量数据的坐标系与设计坐标系一致,在此基础上重建测量得到的加工面,替换理想工序模型中的加工面,最终得到针对每一道工序的工件中间体几何孪生模型。本发明基于工艺信息提高了配准的针对性和有效性,数字化保留了制造过程中的工
一种几何模型和数据模型融合驱动的数字孪生构建方法.pdf
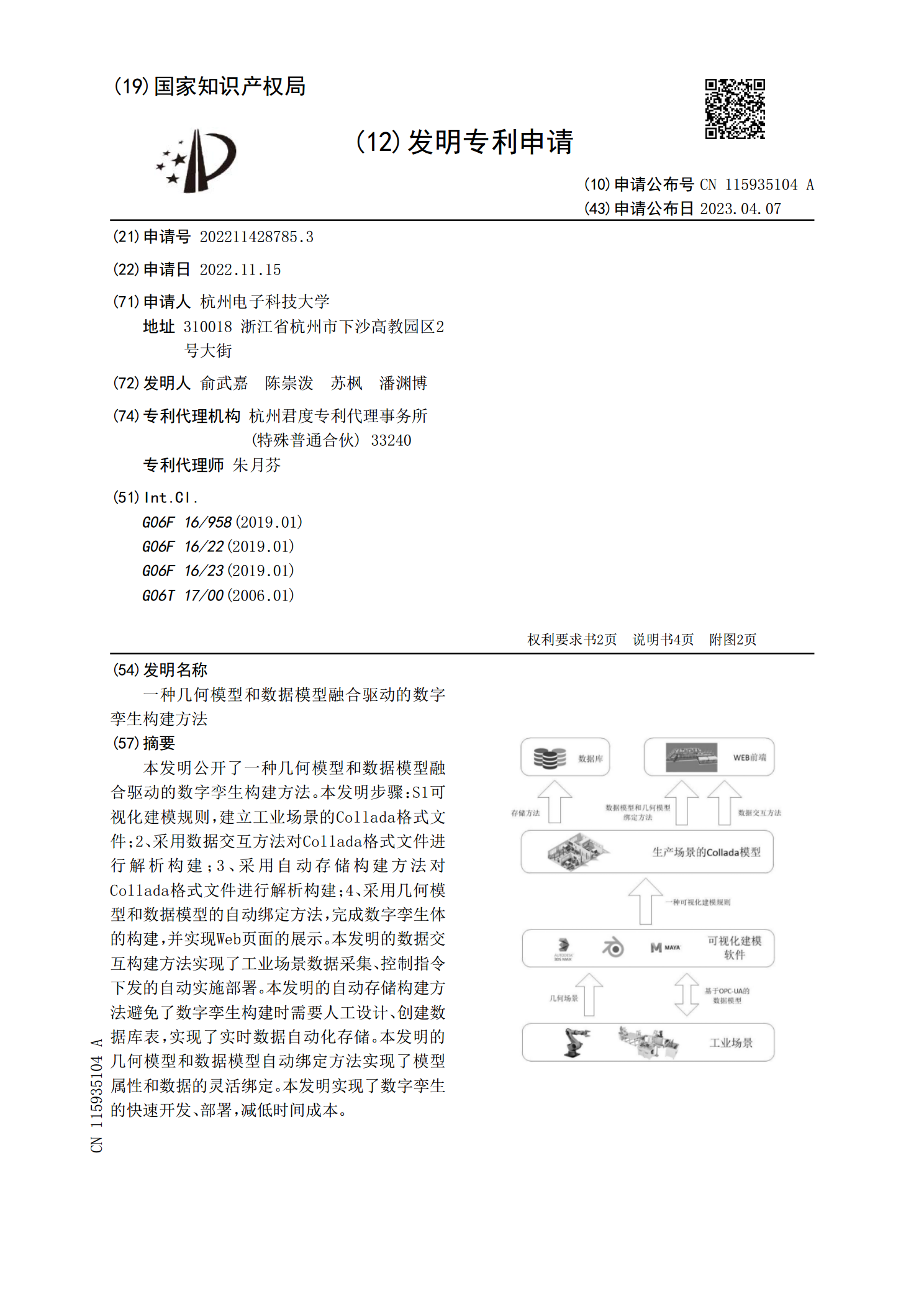
本发明公开了一种几何模型和数据模型融合驱动的数字孪生构建方法。本发明步骤:S1可视化建模规则,建立工业场景的Collada格式文件;2、采用数据交互方法对Collada格式文件进行解析构建;3、采用自动存储构建方法对Collada格式文件进行解析构建;4、采用几何模型和数据模型的自动绑定方法,完成数字孪生体的构建,并实现Web页面的展示。本发明的数据交互构建方法实现了工业场景数据采集、控制指令下发的自动实施部署。本发明的自动存储构建方法避免了数字孪生构建时需要人工设计、创建数据库表,实现了实时数据自动化存