
静电纺丝的轨迹控制系统及方法、静电纺丝设备.pdf

佳宁****么啦

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
静电纺丝的轨迹控制系统及方法、静电纺丝设备.pdf
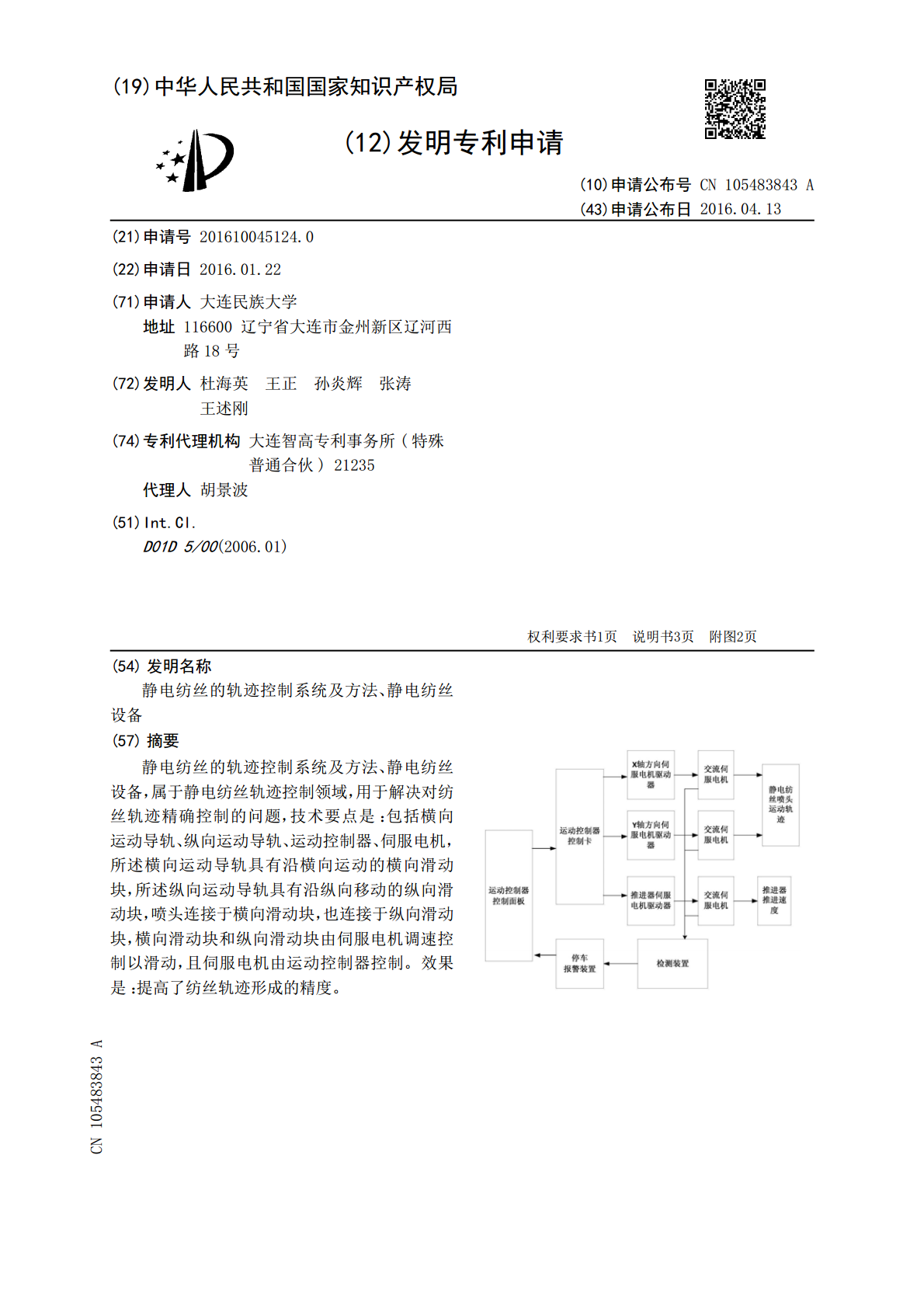
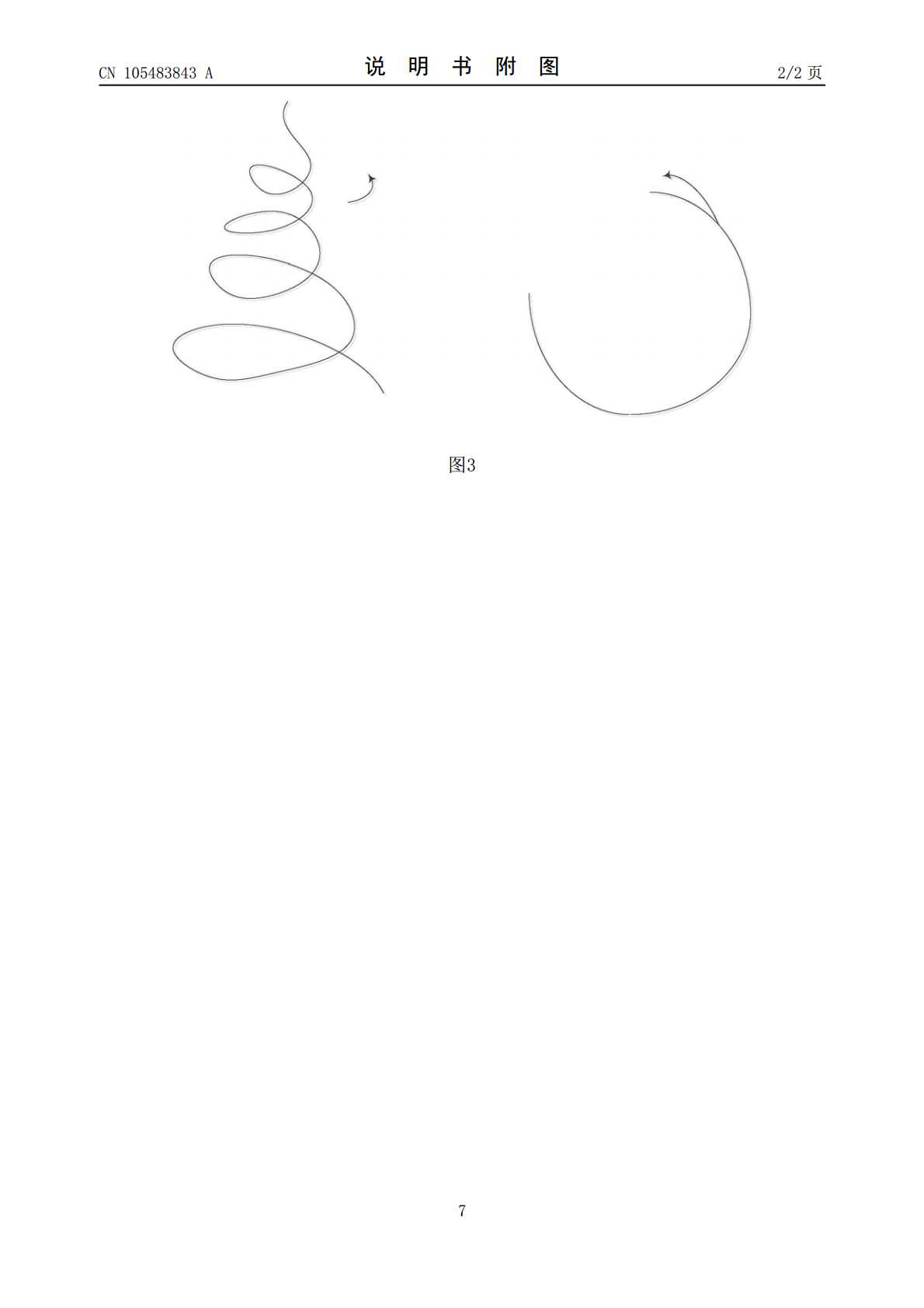
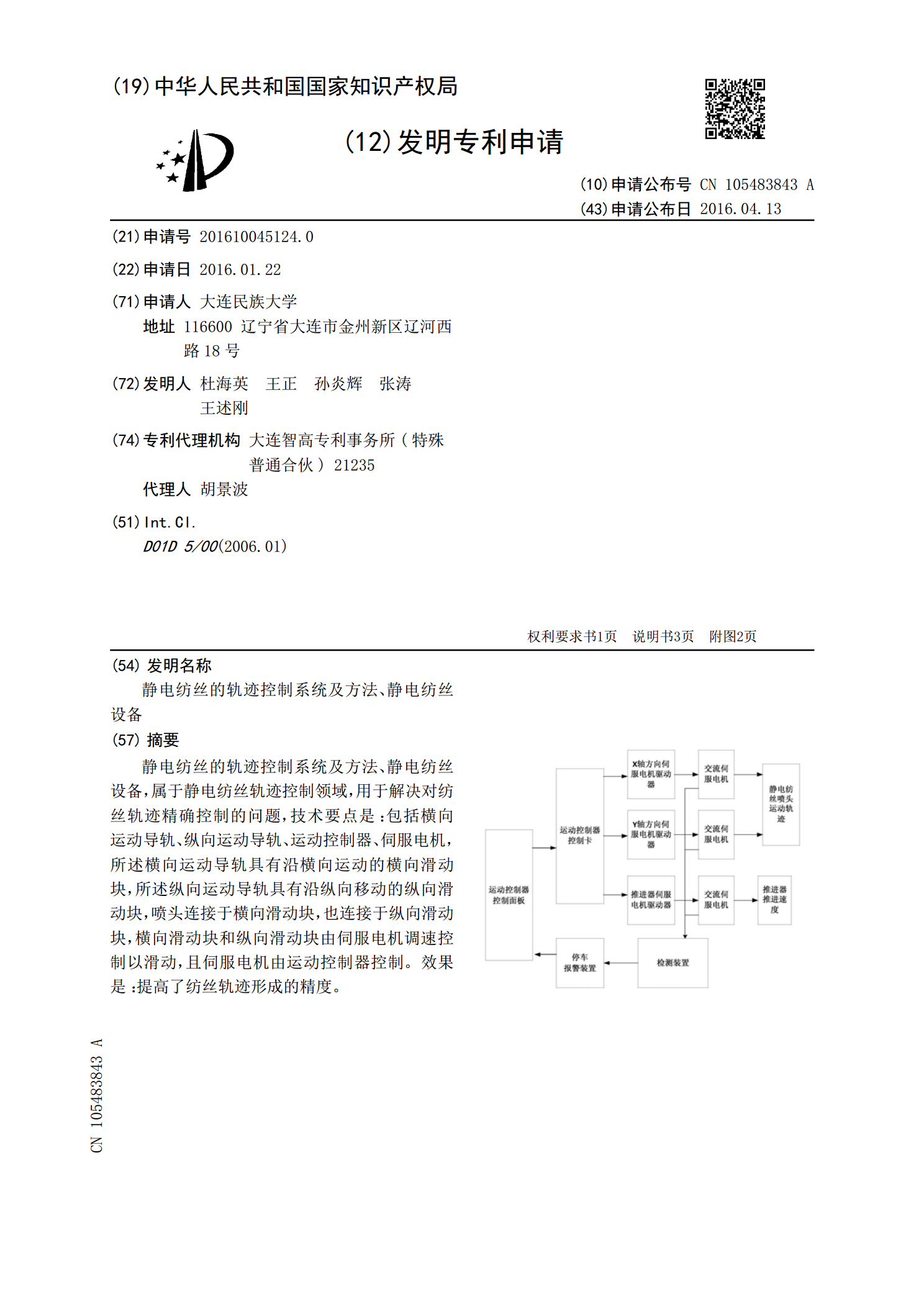
静电纺丝的轨迹控制系统及方法、静电纺丝设备,属于静电纺丝轨迹控制领域,用于解决对纺丝轨迹精确控制的问题,技术要点是:包括横向运动导轨、纵向运动导轨、运动控制器、伺服电机,所述横向运动导轨具有沿横向运动的横向滑动块,所述纵向运动导轨具有沿纵向移动的纵向滑动块,喷头连接于横向滑动块,也连接于纵向滑动块,横向滑动块和纵向滑动块由伺服电机调速控制以滑动,且伺服电机由运动控制器控制。效果是:提高了纺丝轨迹形成的精度。

基于联合仿真方法研究静电纺丝轨迹.docx
基于联合仿真方法研究静电纺丝轨迹基于联合仿真方法研究静电纺丝轨迹摘要:静电纺丝是一种用于制备纳米纤维的重要技术,其纤维直径通常在几百纳米到几微米之间。纺丝过程中,纺丝液通过静电力在高电场中被拉伸成纤维,并在一个基板上形成纤维网状结构。为了优化纺丝工艺以得到理想的纤维结构,需要对纺丝轨迹进行研究。本文提出了一种基于联合仿真方法来研究静电纺丝轨迹的方案。通过结合流体力学仿真和电场仿真,我们可以模拟纺丝液在喷嘴出口、环境气流和电场作用下的运动,从而得到纺丝轨迹的模拟结果。实验结果表明,我们的方法可以准确地预测纺
静电纺丝管状支架收集装置及静电纺丝设备.pdf
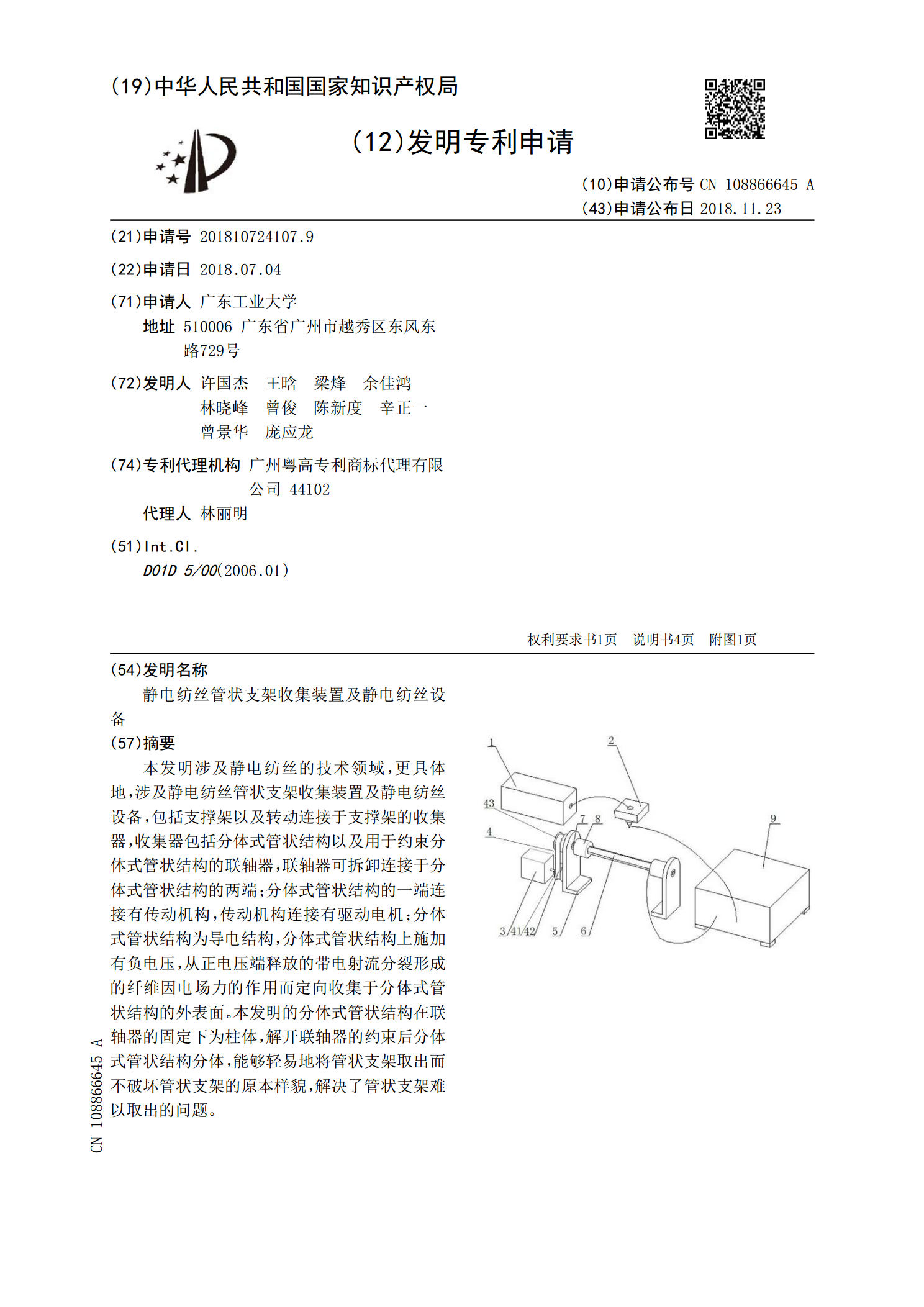
本发明涉及静电纺丝的技术领域,更具体地,涉及静电纺丝管状支架收集装置及静电纺丝设备,包括支撑架以及转动连接于支撑架的收集器,收集器包括分体式管状结构以及用于约束分体式管状结构的联轴器,联轴器可拆卸连接于分体式管状结构的两端;分体式管状结构的一端连接有传动机构,传动机构连接有驱动电机;分体式管状结构为导电结构,分体式管状结构上施加有负电压,从正电压端释放的带电射流分裂形成的纤维因电场力的作用而定向收集于分体式管状结构的外表面。本发明的分体式管状结构在联轴器的固定下为柱体,解开联轴器的约束后分体式管状结构分体
静电纺丝.doc
河北科技大学硕士学位论文摘要6061摘要锂离子电池是一种绿色环保的储能装置。由于锂离子电池的能量密度高、循环寿命长并且没有记忆效应价格较低自放电小并且环保一直备受青睐。随着能源环境危机以及日常生活中便携设备的增加对于锂离子电池的性能要求越来越高。由于纳米材料优异的性能其已经被用于高性能锂离子电池的开发。静电纺丝是制备一维纳米材料的方法之一。其操作简单及价格低廉的优势使其得到了广泛地应用因此可以通过静电纺丝技术来制备可以用为用于锂离子电池负极材料的无机纳米纤维。本文详细阐述了利用单轴、同轴静

静电纺丝.doc
河北科技大学硕士学位论文摘要摘要锂离子电池是一种绿色环保的储能装置。由于锂离子电池的能量密度高、循环寿命长并且没有记忆效应,价格较低,自放电小并且环保,一直备受青睐。随着能源环境危机,以及日常生活中便携设备的增加,对于锂离子电池的性能要求越来越高。由于纳米材料优异的性能,其已经被用于高性能锂离子电池的开发。静电纺丝是制备一维纳米材料的方法之一。其操作简单及价格低廉的优势,使其得到了广泛地应用,因此,可以通过静电纺丝技术来制备可以用为用于锂离子电池负极材料的无机纳米纤维。