
电磁抱闸控制装置及电磁抱闸设备.pdf

努力****晓骞


1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电磁抱闸控制装置及电磁抱闸设备.pdf
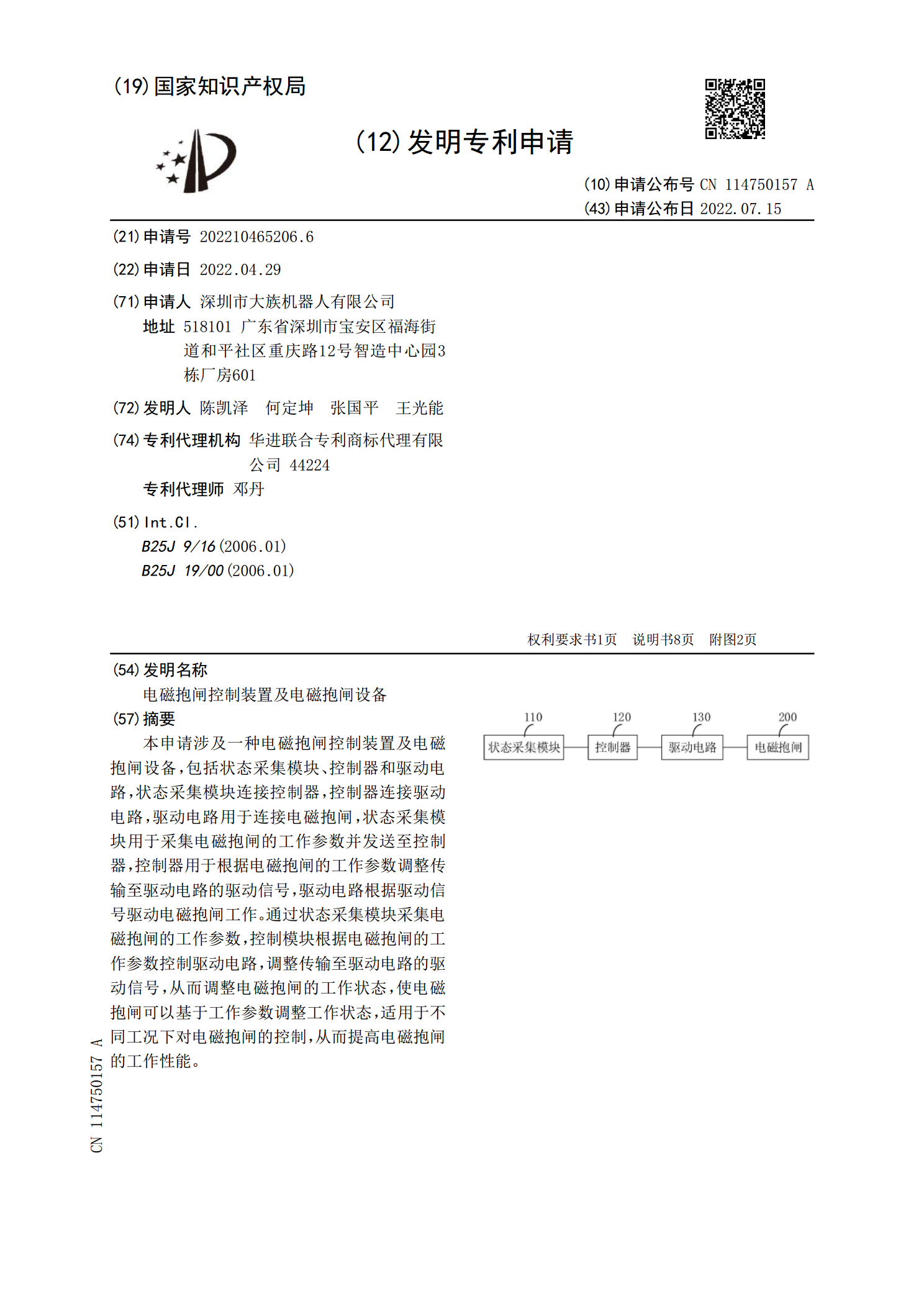
本申请涉及一种电磁抱闸控制装置及电磁抱闸设备,包括状态采集模块、控制器和驱动电路,状态采集模块连接控制器,控制器连接驱动电路,驱动电路用于连接电磁抱闸,状态采集模块用于采集电磁抱闸的工作参数并发送至控制器,控制器用于根据电磁抱闸的工作参数调整传输至驱动电路的驱动信号,驱动电路根据驱动信号驱动电磁抱闸工作。通过状态采集模块采集电磁抱闸的工作参数,控制模块根据电磁抱闸的工作参数控制驱动电路,调整传输至驱动电路的驱动信号,从而调整电磁抱闸的工作状态,使电磁抱闸可以基于工作参数调整工作状态,适用于不同工况下对电磁
电磁抱闸的结构和工作原理.ppt
电动机机械制动电动机机械制动电磁抱闸的结构和工作原理电磁抱闸的结构和工作原理电磁抱闸的结构和工作原理电路组成与技术要求电路组成与技术要求工作原理工作原理工作原理工作原理工作原理工作原理工作原理工作原理工作原理
抱闸续流电路、抱闸制动系统和抱闸续流控制方法.pdf
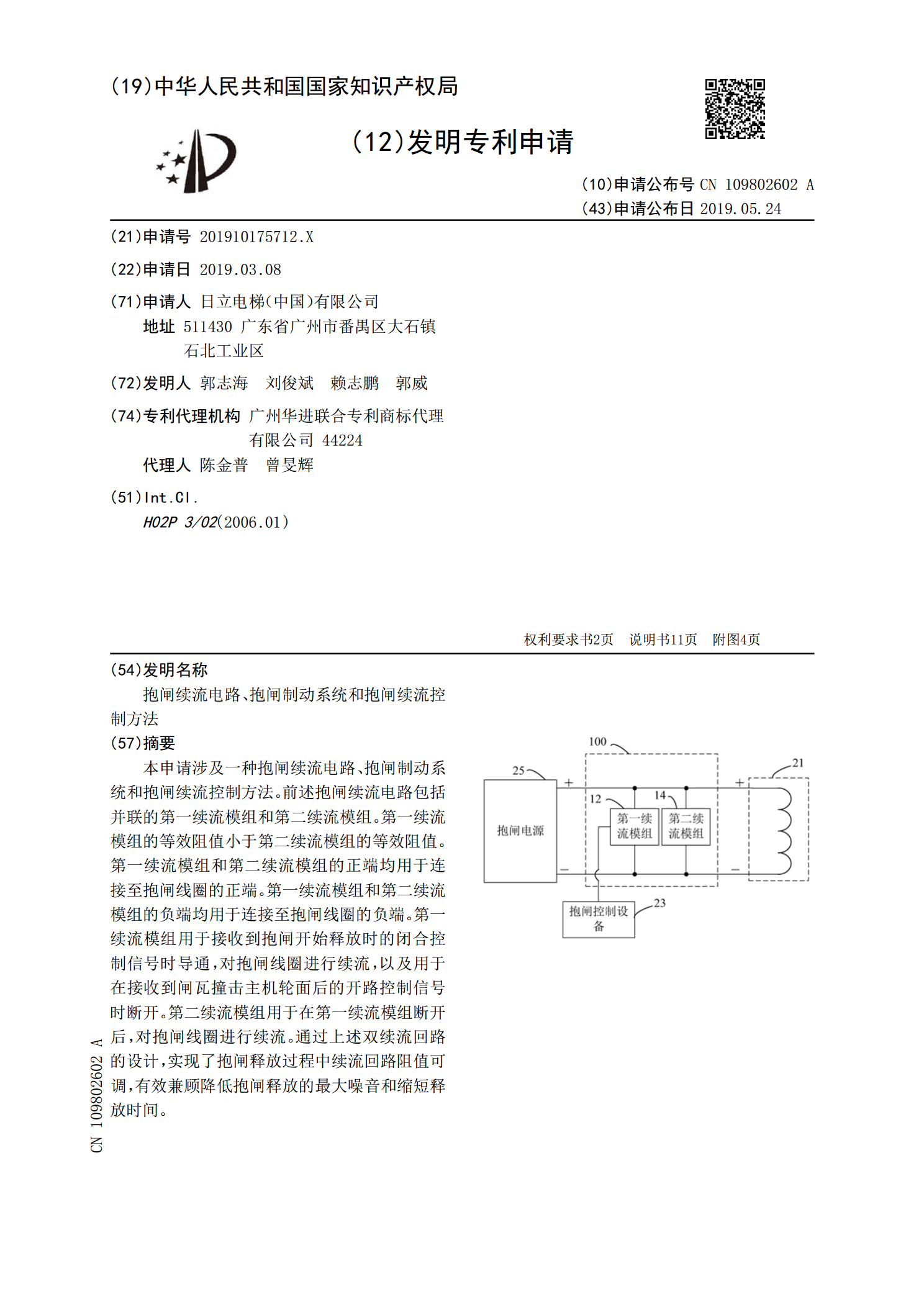
本申请涉及一种抱闸续流电路、抱闸制动系统和抱闸续流控制方法。前述抱闸续流电路包括并联的第一续流模组和第二续流模组。第一续流模组的等效阻值小于第二续流模组的等效阻值。第一续流模组和第二续流模组的正端均用于连接至抱闸线圈的正端。第一续流模组和第二续流模组的负端均用于连接至抱闸线圈的负端。第一续流模组用于接收到抱闸开始释放时的闭合控制信号时导通,对抱闸线圈进行续流,以及用于在接收到闸瓦撞击主机轮面后的开路控制信号时断开。第二续流模组用于在第一续流模组断开后,对抱闸线圈进行续流。通过上述双续流回路的设计,实现了抱

任务1电磁抱闸制动器制动控制线路的安装与检修.ppt
1.熟悉电磁抱闸制动器、电磁离合器制动器的基本结构、工作原理及型号含义,熟记它的图形符号和文字符号。为了能使电动机迅速停转,需要对电动机进行制动。一、电磁抱闸制动器电磁铁和制动器的型号及其含义如下:结构符号通电制动型的工作原理如下:当制动电磁铁的线圈得电时,闸瓦紧紧抱住闸轮制动;当线圈失电时,制动器的闸瓦与闸轮分开,无制动作用。二、电磁抱闸制动器制动控制线路电磁抱闸制动器通电制动控制电路图三、电磁离合器制动器2.工作原理线路安装线路安装线路安装故障检修故障现象
一种设置有电磁抱闸的轮椅升降平台.pdf
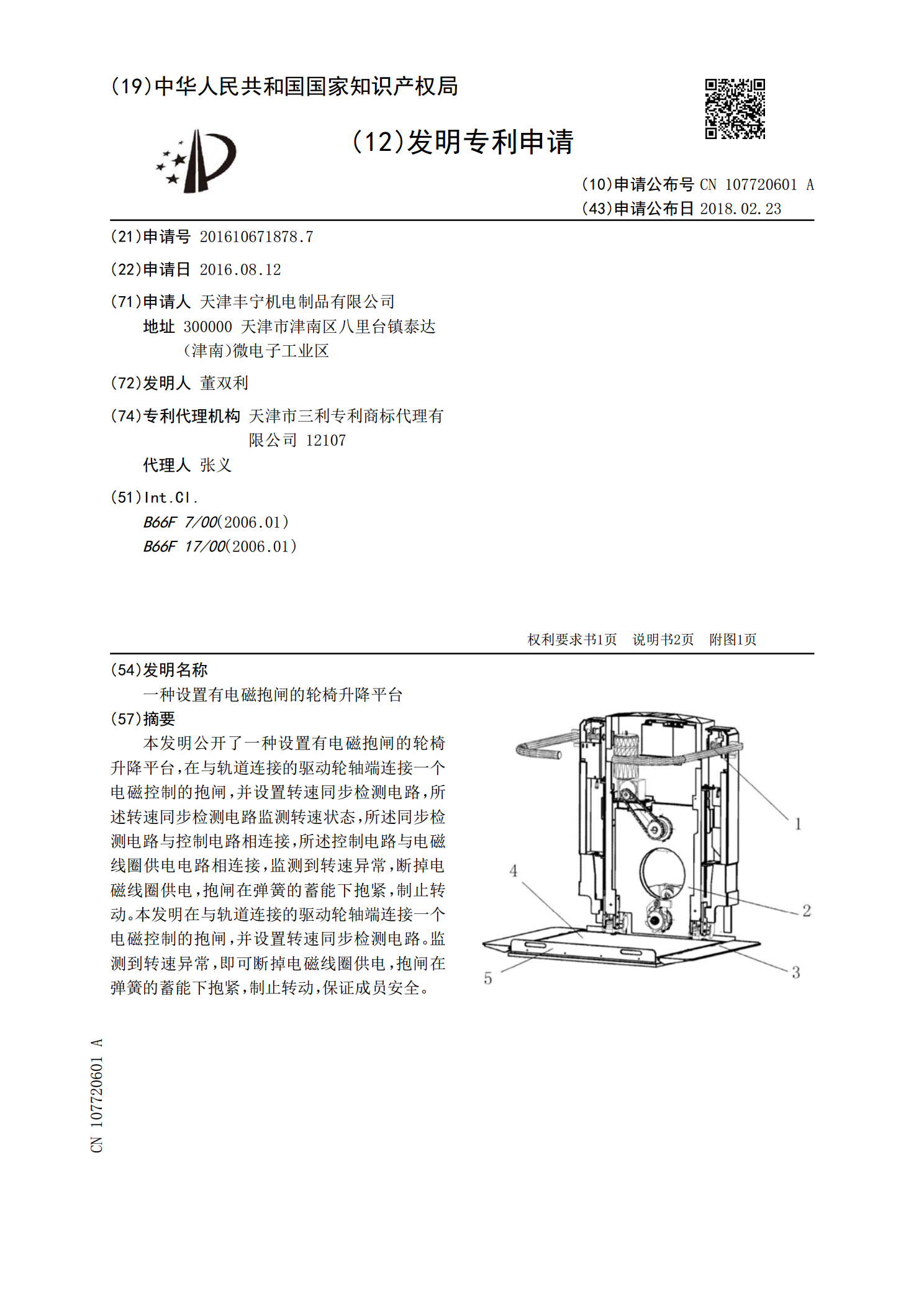
本发明公开了一种设置有电磁抱闸的轮椅升降平台,在与轨道连接的驱动轮轴端连接一个电磁控制的抱闸,并设置转速同步检测电路,所述转速同步检测电路监测转速状态,所述同步检测电路与控制电路相连接,所述控制电路与电磁线圈供电电路相连接,监测到转速异常,断掉电磁线圈供电,抱闸在弹簧的蓄能下抱紧,制止转动。本发明在与轨道连接的驱动轮轴端连接一个电磁控制的抱闸,并设置转速同步检测电路。监测到转速异常,即可断掉电磁线圈供电,抱闸在弹簧的蓄能下抱紧,制止转动,保证成员安全。