
基于多传感器融合和深度学习的垃圾分类识别方法及装置.pdf

小宏****aa

1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多传感器融合和深度学习的垃圾分类识别方法及装置.pdf
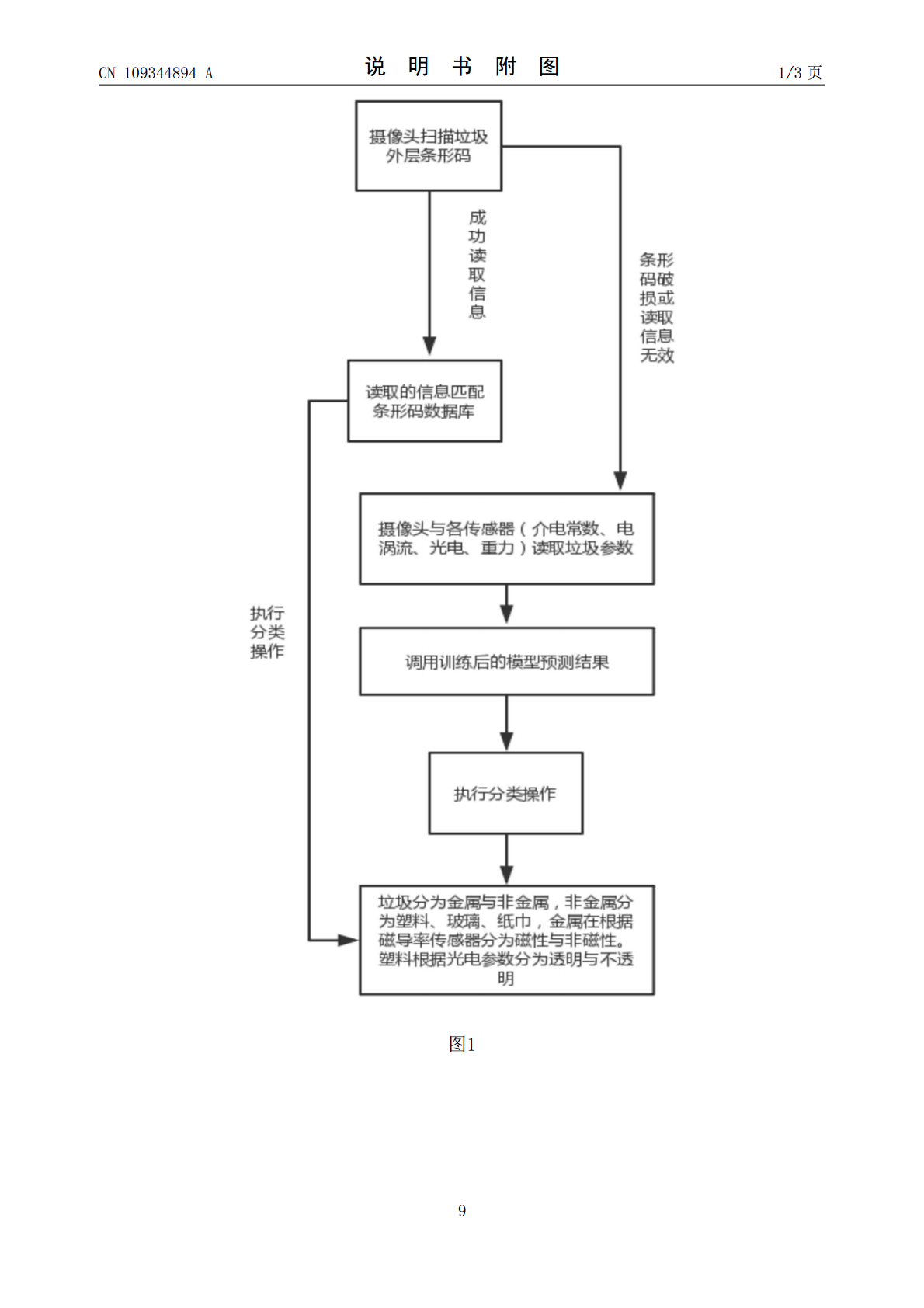
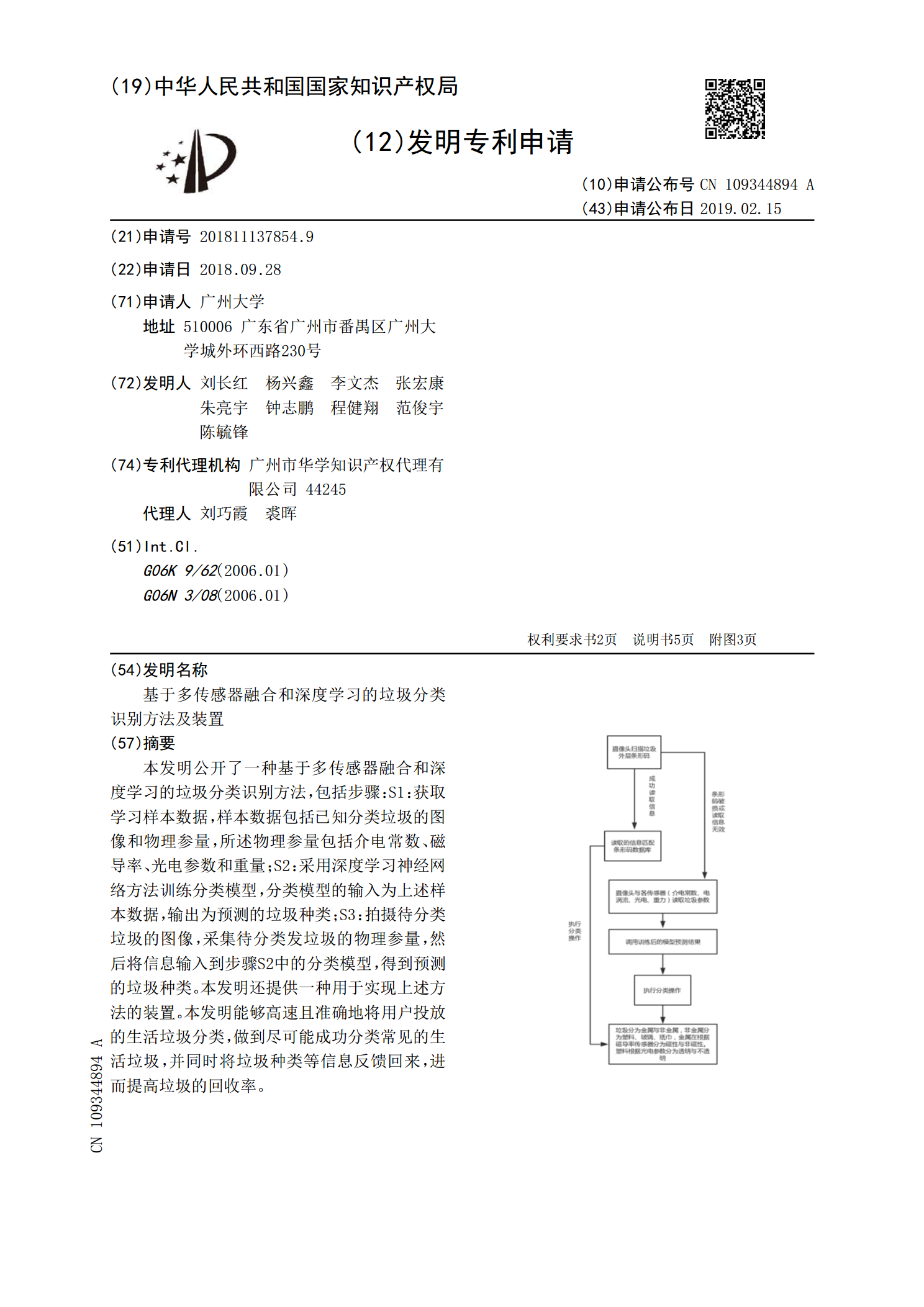
本发明公开了一种基于多传感器融合和深度学习的垃圾分类识别方法,包括步骤:S1:获取学习样本数据,样本数据包括已知分类垃圾的图像和物理参量,所述物理参量包括介电常数、磁导率、光电参数和重量;S2:采用深度学习神经网络方法训练分类模型,分类模型的输入为上述样本数据,输出为预测的垃圾种类;S3:拍摄待分类垃圾的图像,采集待分类发垃圾的物理参量,然后将信息输入到步骤S2中的分类模型,得到预测的垃圾种类。本发明还提供一种用于实现上述方法的装置。本发明能够高速且准确地将用户投放的生活垃圾分类,做到尽可能成功分类常见的
基于浅层学习和深度学习融合的心音识别方法及相关装置.pdf
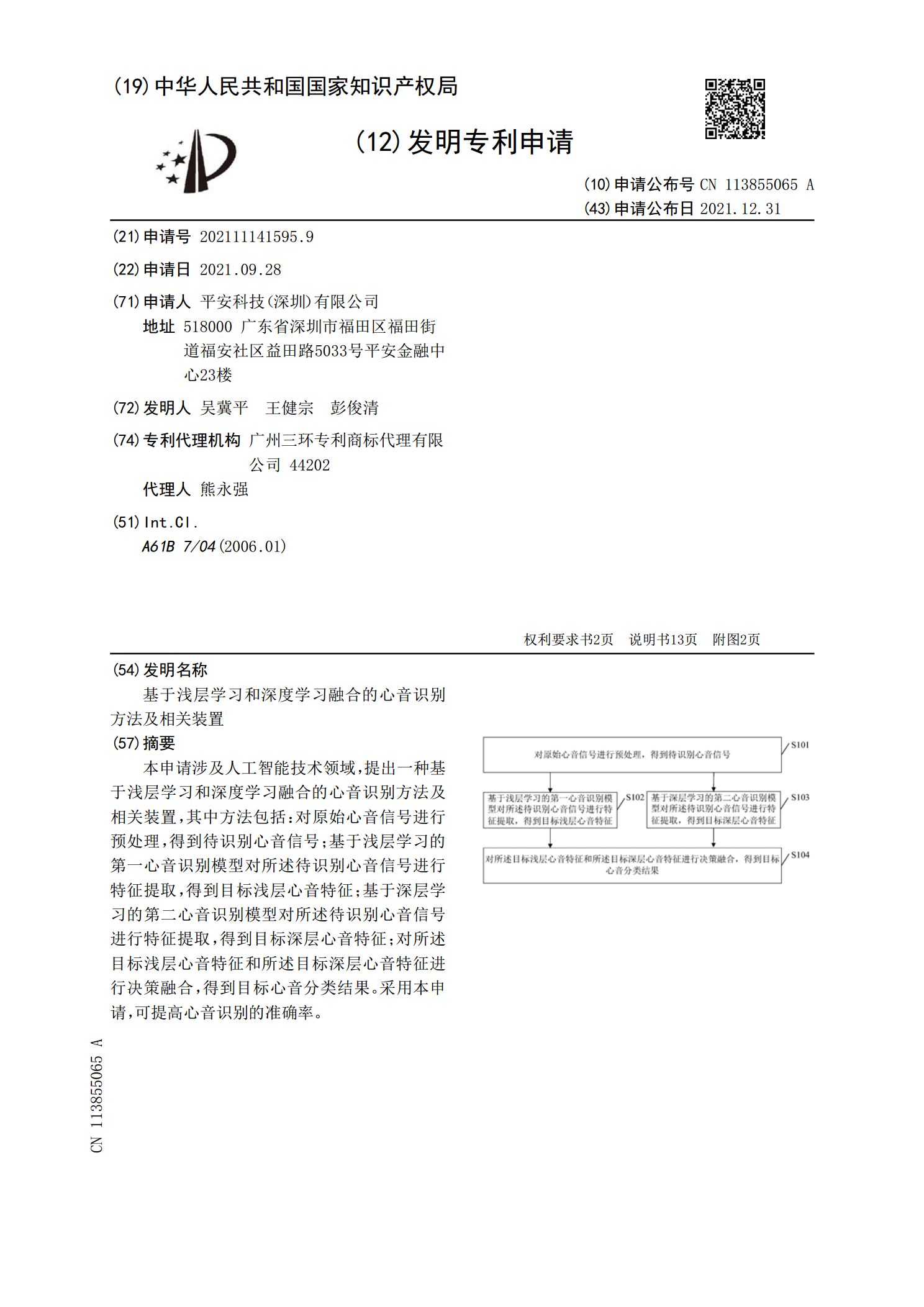
本申请涉及人工智能技术领域,提出一种基于浅层学习和深度学习融合的心音识别方法及相关装置,其中方法包括:对原始心音信号进行预处理,得到待识别心音信号;基于浅层学习的第一心音识别模型对所述待识别心音信号进行特征提取,得到目标浅层心音特征;基于深层学习的第二心音识别模型对所述待识别心音信号进行特征提取,得到目标深层心音特征;对所述目标浅层心音特征和所述目标深层心音特征进行决策融合,得到目标心音分类结果。采用本申请,可提高心音识别的准确率。

基于多特征融合和深度学习的商品图像分类.docx
基于多特征融合和深度学习的商品图像分类基于多特征融合和深度学习的商品图像分类摘要:商品图像分类是电子商务和计算机视觉领域的关键技术之一。本文提出了一种基于多特征融合和深度学习的商品图像分类方法,旨在提高商品图像分类的准确性和效率。首先,通过使用图像处理技术,提取商品图像中的颜色、纹理和形状等多种特征。然后,采用特征融合技术将多个特征组合成一个综合特征向量。最后,使用深度学习算法对综合特征向量进行分类。实验结果表明,该方法在商品图像分类中具有较高的准确性和效率。关键词:商品图像分类、特征提取、特征融合、深度

基于多模态深度学习的流量分类识别方法.pptx
基于多模态深度学习的流量分类识别方法目录添加章节标题多模态深度学习概述定义和原理在流量分类识别中的应用优势与挑战基于多模态深度学习的流量分类识别方法数据预处理特征提取模型构建与训练分类与识别实验设计与结果分析数据集选择与实验设置实验过程与结果结果分析与比较方法优缺点与改进方向优点分析缺点分析改进方向与展望实际应用与案例分析在网络安全领域的应用在互联网流量管理中的应用案例分析与实践经验总结与展望研究总结未来研究方向THANKYOU
基于多传感器融合的车位场景识别方法.pdf
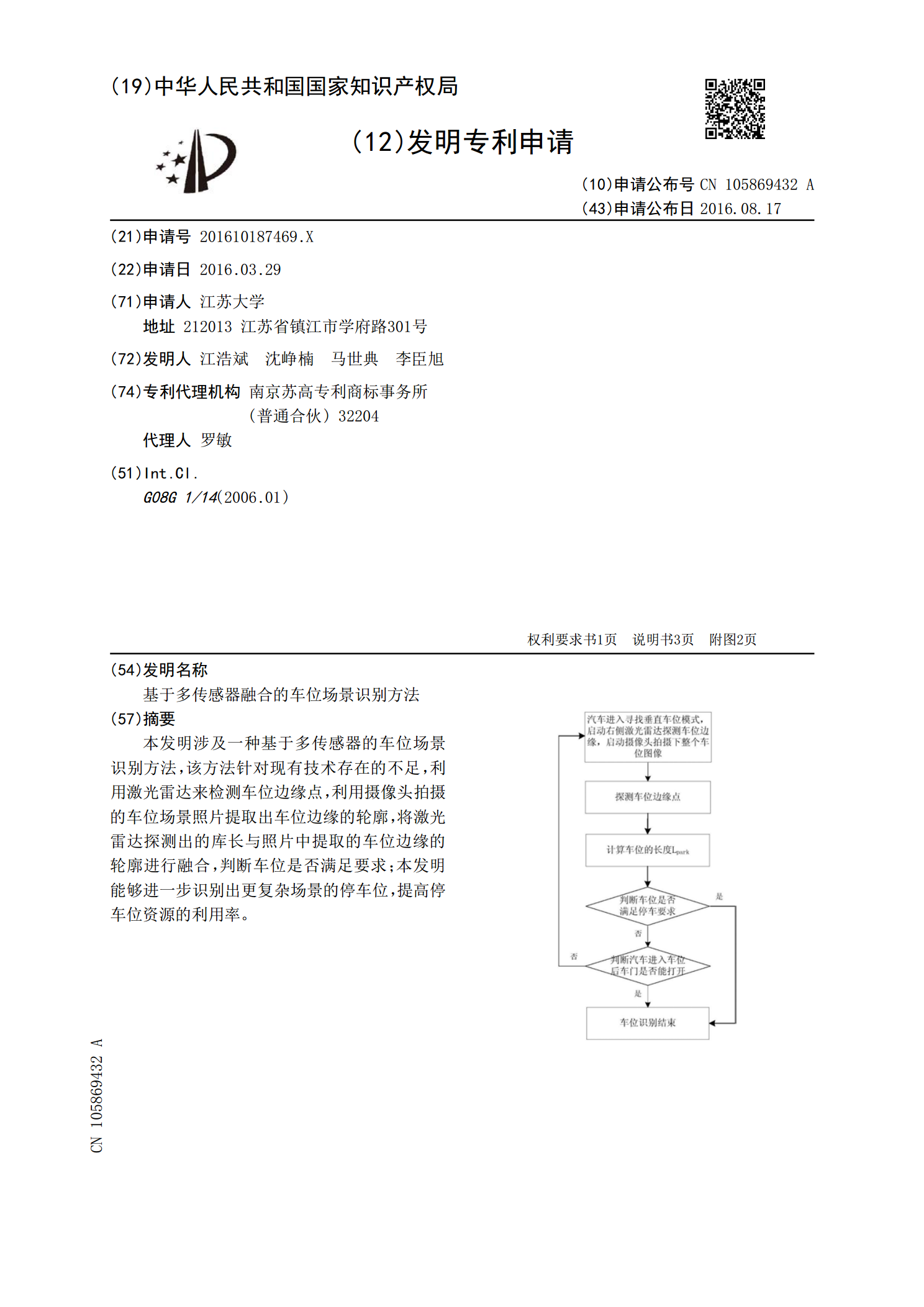
本发明涉及一种基于多传感器的车位场景识别方法,该方法针对现有技术存在的不足,利用激光雷达来检测车位边缘点,利用摄像头拍摄的车位场景照片提取出车位边缘的轮廓,将激光雷达探测出的库长与照片中提取的车位边缘的轮廓进行融合,判断车位是否满足要求;本发明能够进一步识别出更复杂场景的停车位,提高停车位资源的利用率。