
一种可控式机组胀差调节系统及其方法.pdf

含平****ng

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可控式机组胀差调节系统及其方法.pdf
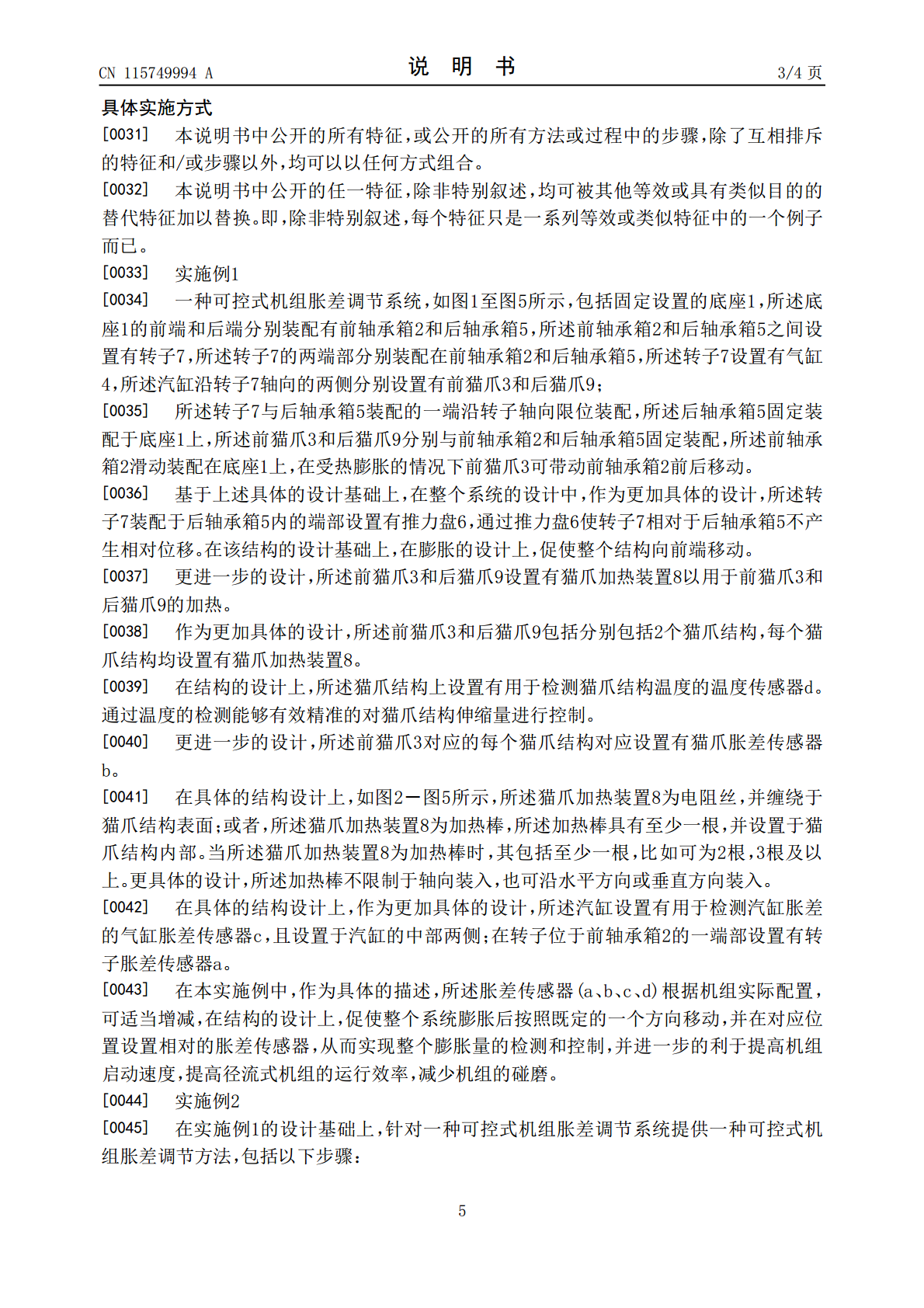
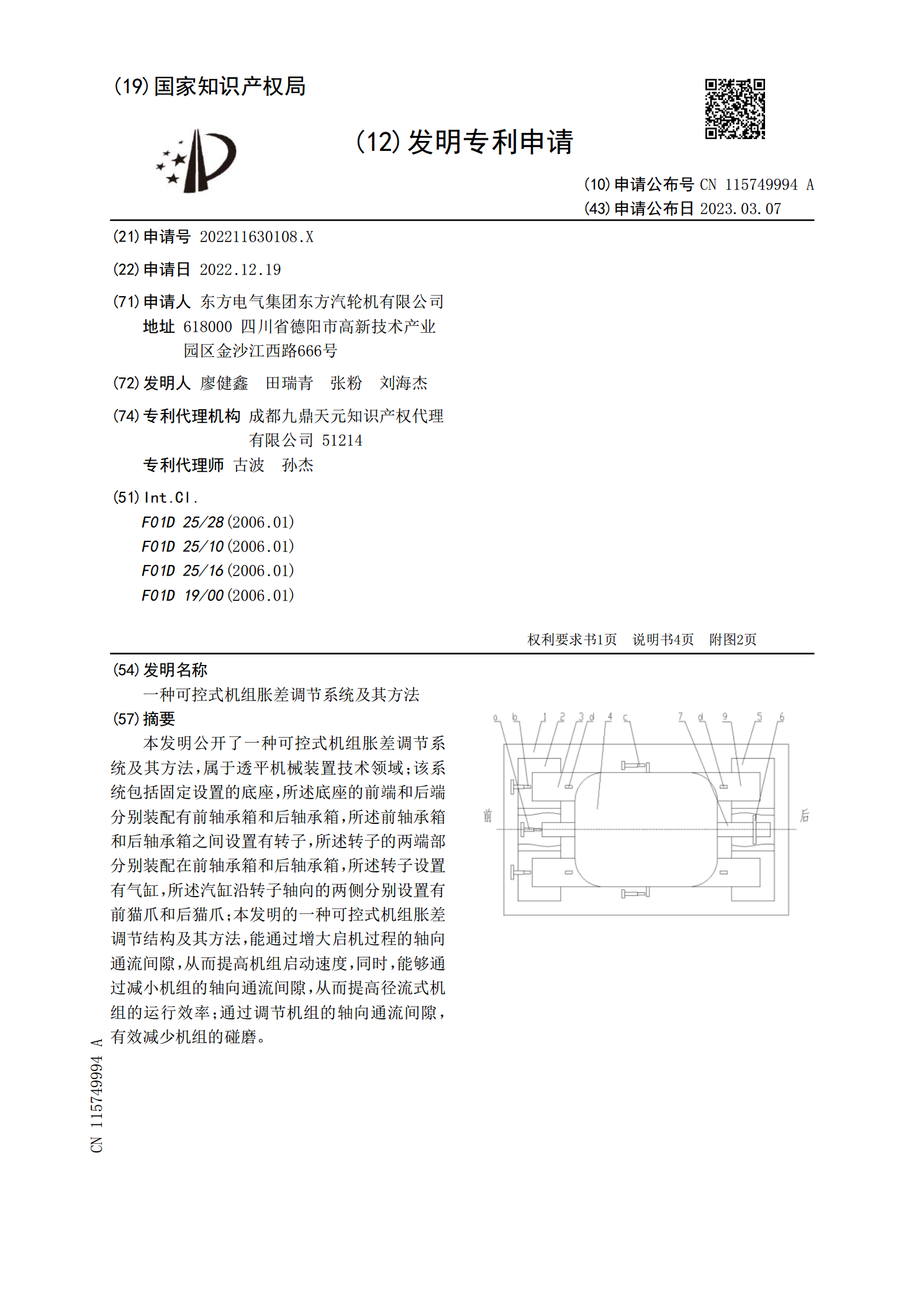
本发明公开了一种可控式机组胀差调节系统及其方法,属于透平机械装置技术领域;该系统包括固定设置的底座,所述底座的前端和后端分别装配有前轴承箱和后轴承箱,所述前轴承箱和后轴承箱之间设置有转子,所述转子的两端部分别装配在前轴承箱和后轴承箱,所述转子设置有气缸,所述汽缸沿转子轴向的两侧分别设置有前猫爪和后猫爪;本发明的一种可控式机组胀差调节结构及其方法,能通过增大启机过程的轴向通流间隙,从而提高机组启动速度,同时,能够通过减小机组的轴向通流间隙,从而提高径流式机组的运行效率;通过调节机组的轴向通流间隙,有效减少机

超临界机组汽轮机胀差问题分析及其控制.docx
超临界机组汽轮机胀差问题分析及其控制一、背景介绍随着全球能源需求不断增长,超临界机组技术在电力工业中得到了广泛应用,这种技术在提高效率和降低排放方面有着很大的优势。超临界机组是通过将汽轮机的蒸汽参数提高到超临界状态来实现高效能利用的。然而,超临界机组汽轮机胀差问题成为了技术应用中的一个关键问题。本文将对超临界机组汽轮机胀差问题进行分析,探讨其控制方法。二、超临界机组汽轮机胀差的原因超临界机组汽轮机胀差问题是由于高温蒸汽的急剧扩张导致的。汽轮机内部的叶轮和叶片相对运动会产生机械磨损和热膨胀,这会使得轴承和密
一种可调节式智能冲压系统及其控制方法.pdf
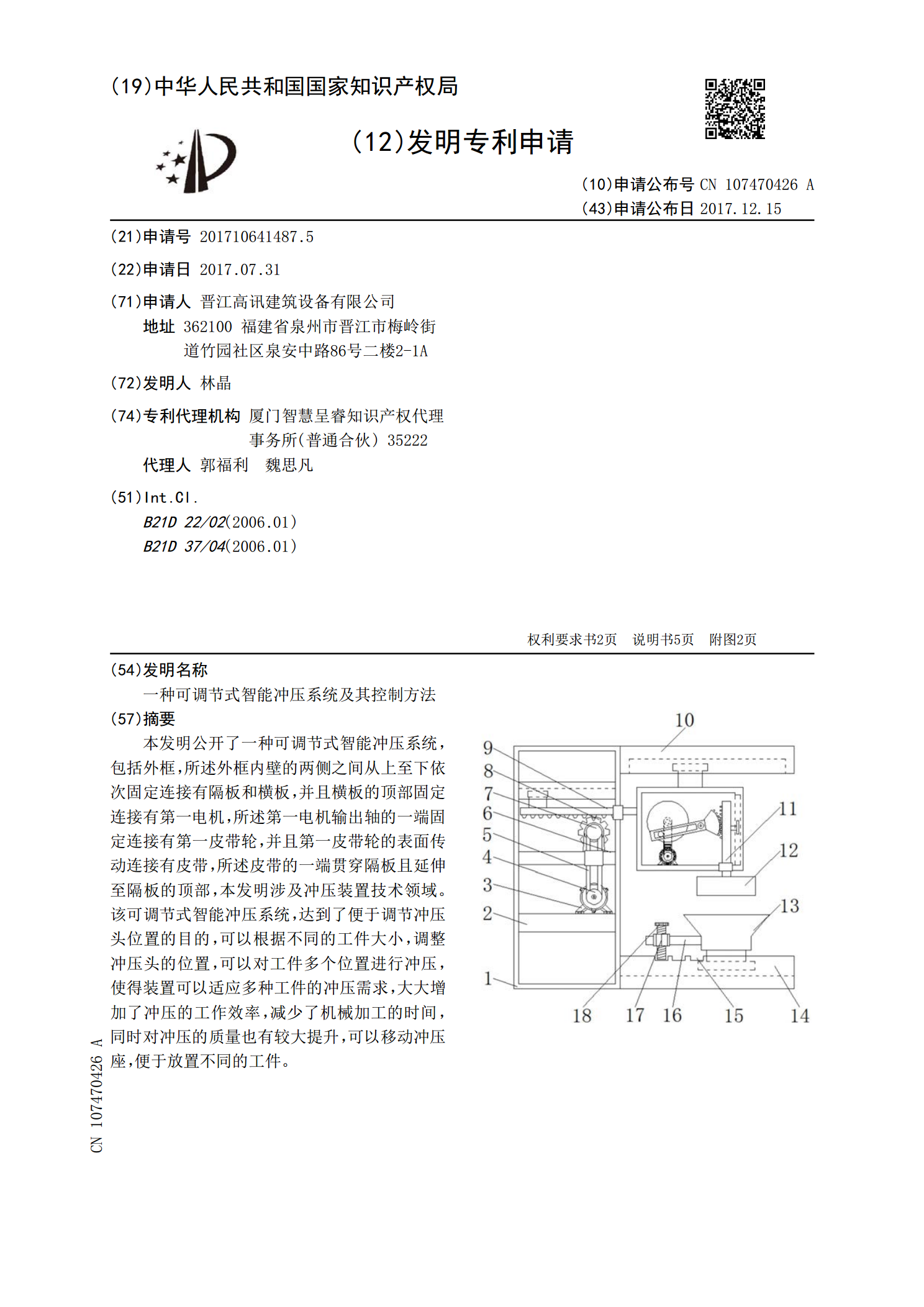
本发明公开了一种可调节式智能冲压系统,包括外框,所述外框内壁的两侧之间从上至下依次固定连接有隔板和横板,并且横板的顶部固定连接有第一电机,所述第一电机输出轴的一端固定连接有第一皮带轮,并且第一皮带轮的表面传动连接有皮带,所述皮带的一端贯穿隔板且延伸至隔板的顶部,本发明涉及冲压装置技术领域。该可调节式智能冲压系统,达到了便于调节冲压头位置的目的,可以根据不同的工件大小,调整冲压头的位置,可以对工件多个位置进行冲压,使得装置可以适应多种工件的冲压需求,大大增加了冲压的工作效率,减少了机械加工的时间,同时对冲压

压差式机械调节系统.pdf
一种机械设计技术领域的压差式机械调节系统,包括:进气管、发动机、排气管、压气机、涡轮、连接管、容积腔、移动体和弹簧,连接管与容积腔壁面相连通,移动体安装容积腔内并与容积腔的内壁面密封接触,贯穿管贯穿移动体的左右两壁面,弹簧的两端分别与移动体的上壁面、容积腔上壁面相连接。当发动机处于中低速工况时,移动体在容积腔内向上移动,废气再循环率较大,发动机各缸排温较低,整机性能较优;当发动机处于高速工况时,移动体在容积腔内向下移动,废气再循环率较小,发动机的动力性较好,整机性能较优。本发明设计合理,结构简单,适用于带

一种可控升降侧装式多普勒测流仪系统及其控制方法.pdf
本发明提供一种可控升降侧装式多普勒测流仪系统及其控制方法,包括以下操作步骤:A)、多普勒剖面流速仪利用自身的垂直波束测得的离水面的距离值;B)、采集的距离值依次经过适配器、数采器,发送到单片机;C)、静压式液位传感器测得实时水位值;D)、采集的实时水位值经过数采器发送到单片机;E)、单片机将采集的距离值与实时水位值进行比较,得出多普勒剖面流速仪所在的位置与实际需要测流的位置是正偏差还是负偏差;F)、单片机依次通过继电器、接触器,控制电动卷扬机的正转或反转来调整多普勒剖面流速仪位置的升降距离。本发明根据软件