
一种花生及秧蔓打捆收获机.pdf

醉香****mm


1/9

2/9
3/9

4/9

5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种花生及秧蔓打捆收获机.pdf
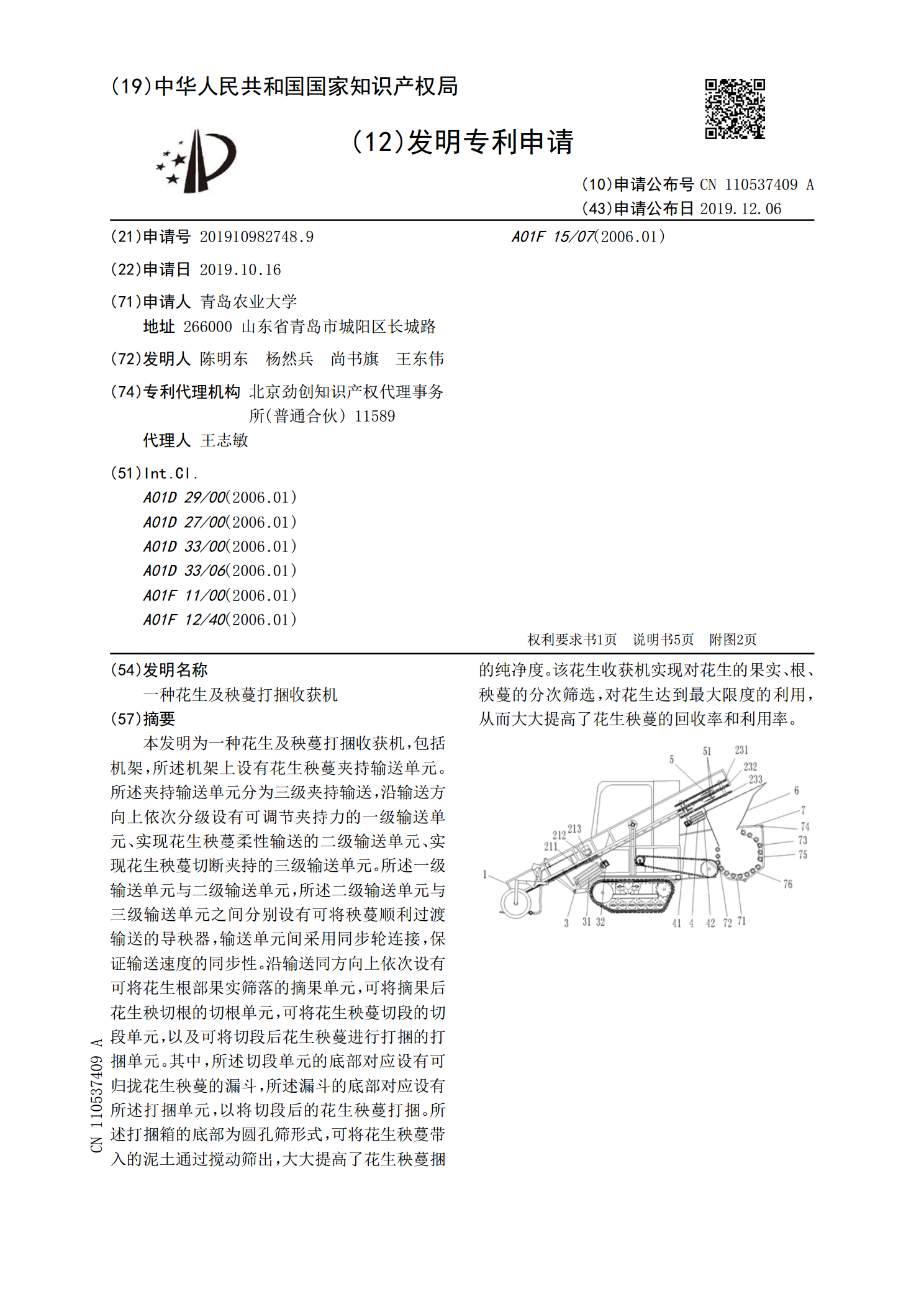
本发明为一种花生及秧蔓打捆收获机,包括机架,所述机架上设有花生秧蔓夹持输送单元。所述夹持输送单元分为三级夹持输送,沿输送方向上依次分级设有可调节夹持力的一级输送单元、实现花生秧蔓柔性输送的二级输送单元、实现花生秧蔓切断夹持的三级输送单元。所述一级输送单元与二级输送单元,所述二级输送单元与三级输送单元之间分别设有可将秧蔓顺利过渡输送的导秧器,输送单元间采用同步轮连接,保证输送速度的同步性。沿输送同方向上依次设有可将花生根部果实筛落的摘果单元,可将摘果后花生秧切根的切根单元,可将花生秧蔓切段的切段单元,以及可

花生收获机扶秧机构.pdf
本发明公开了一种花生收获机扶秧机构,其包括扶秧器、变速箱,被动皮带轮、锥齿轮,所述的变速箱通过输出轮与被动皮带轮采用三角带连接,被动皮带轮上设有一锥齿轮,该锥齿轮与扶秧器的伞齿轮啮合。本发明采用变速箱控制扶秧器的转速,可根据工况实时调整扶秧器的转速,从而提高扶秧效果,减少死机或浪费动力。
一种花生收获机乱秧切断方法.pdf
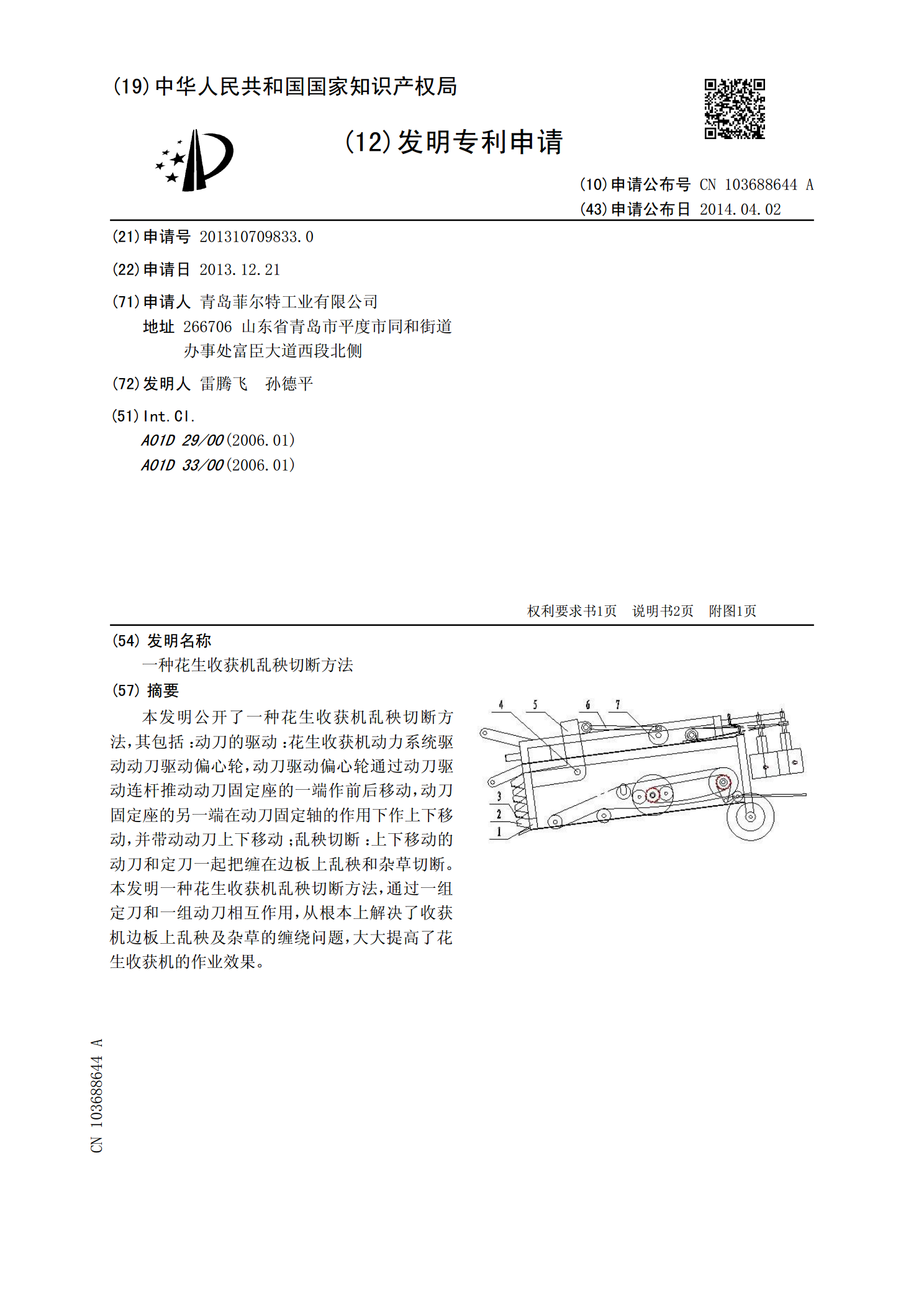
本发明公开了一种花生收获机乱秧切断方法,其包括:动刀的驱动:花生收获机动力系统驱动动刀驱动偏心轮,动刀驱动偏心轮通过动刀驱动连杆推动动刀固定座的一端作前后移动,动刀固定座的另一端在动刀固定轴的作用下作上下移动,并带动动刀上下移动;乱秧切断:上下移动的动刀和定刀一起把缠在边板上乱秧和杂草切断。本发明一种花生收获机乱秧切断方法,通过一组定刀和一组动刀相互作用,从根本上解决了收获机边板上乱秧及杂草的缠绕问题,大大提高了花生收获机的作业效果。

花生收获机乱秧切断机构.pdf
本发明公开了一种花生收获机乱秧切断机构,其包括边板、定刀,动刀和动刀传动机构,所述的边板为花生收获机前面的挡板;所述的动刀传动机构包括动刀固定轴、动刀固定座、动刀驱动连杆和动刀驱动偏心轮;其中定刀固定安装在边板上,动刀安装在动刀固定座的一端,动刀与定刀组成剪刀状的结构;动刀固定座上设有动刀固定轴,动刀固定座的另一端与动刀驱动连杆的一端相连,动刀驱动连杆的另一端与动刀驱动偏心轮连接。本发明花生收获机乱秧切断机构,通过一组定刀和一组动刀相互作用,从根本上解决了收获机边板上乱秧及杂草的缠绕问题,大大提高了花生收

一种可调节震动式花生秧果分离收获机.pdf
本发明公开了一种可调节震动式花生秧果分离收获机,其结构包括第二下料板、处理装置、进料口、分离摘件、第一下料板、机台,本发明进行使用时,分离摘件对花生秧果进行分离后,花生会随之下落到转动散件上,驱动电机带动转轴进行转动,转动散件会随之转动,在对花生秧果进行分离处理,分离后的花生果中会参与花生秧和泥土,通过转动散件转动对其进行打散处理,打散后的花生秧果会随之落入筛滤组件上,通过筛滤组件对花生秧果和泥土进行分散开,花生秧和泥土在筛滤组件作用下掉落到废料盒上,花生果在落料滑板的作用下掉落到收料盒进行回收。