
一种新型多构态绞线驱动机械手.pdf

一只****生物


1/10

2/10
3/10
4/10

5/10

6/10
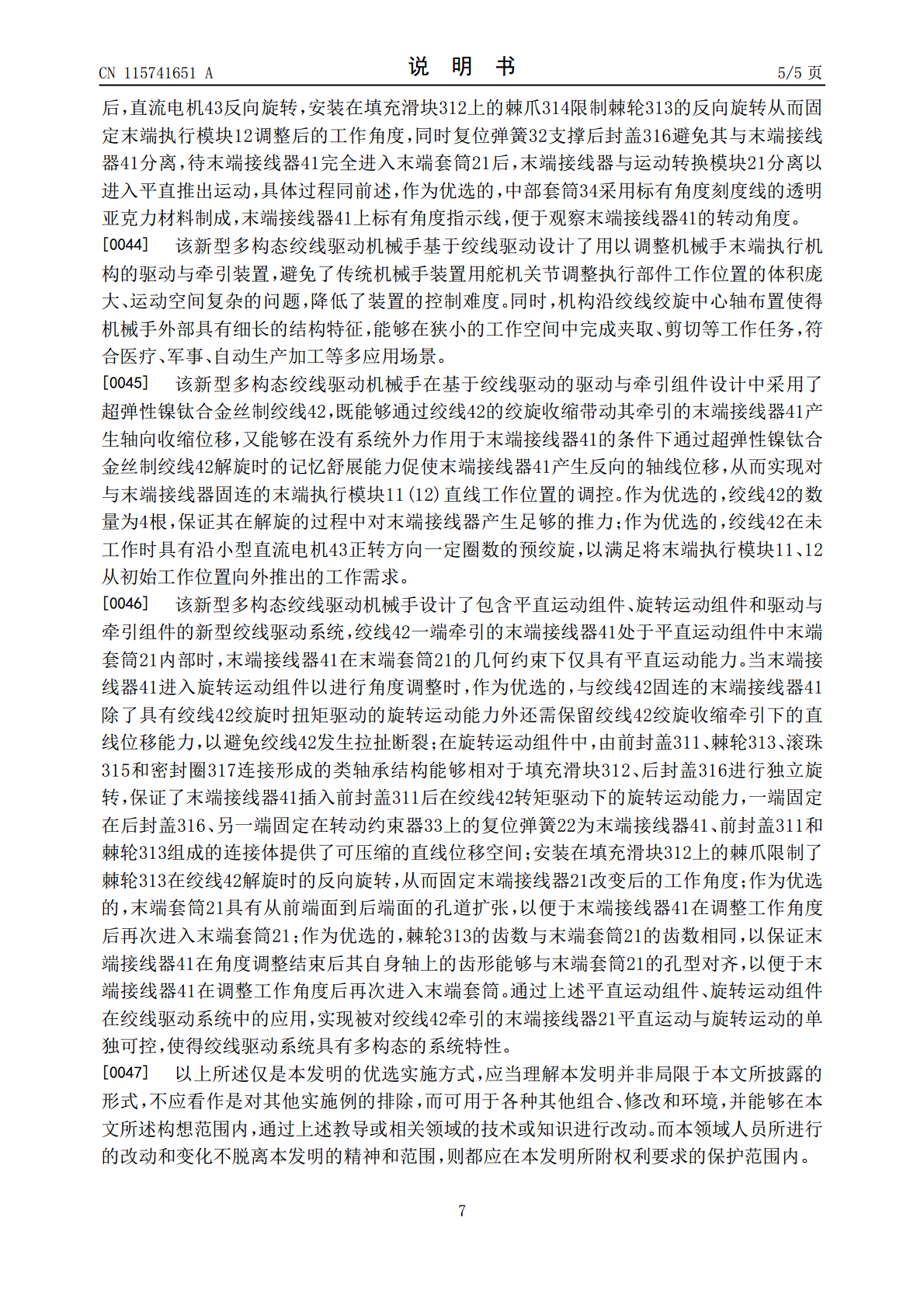
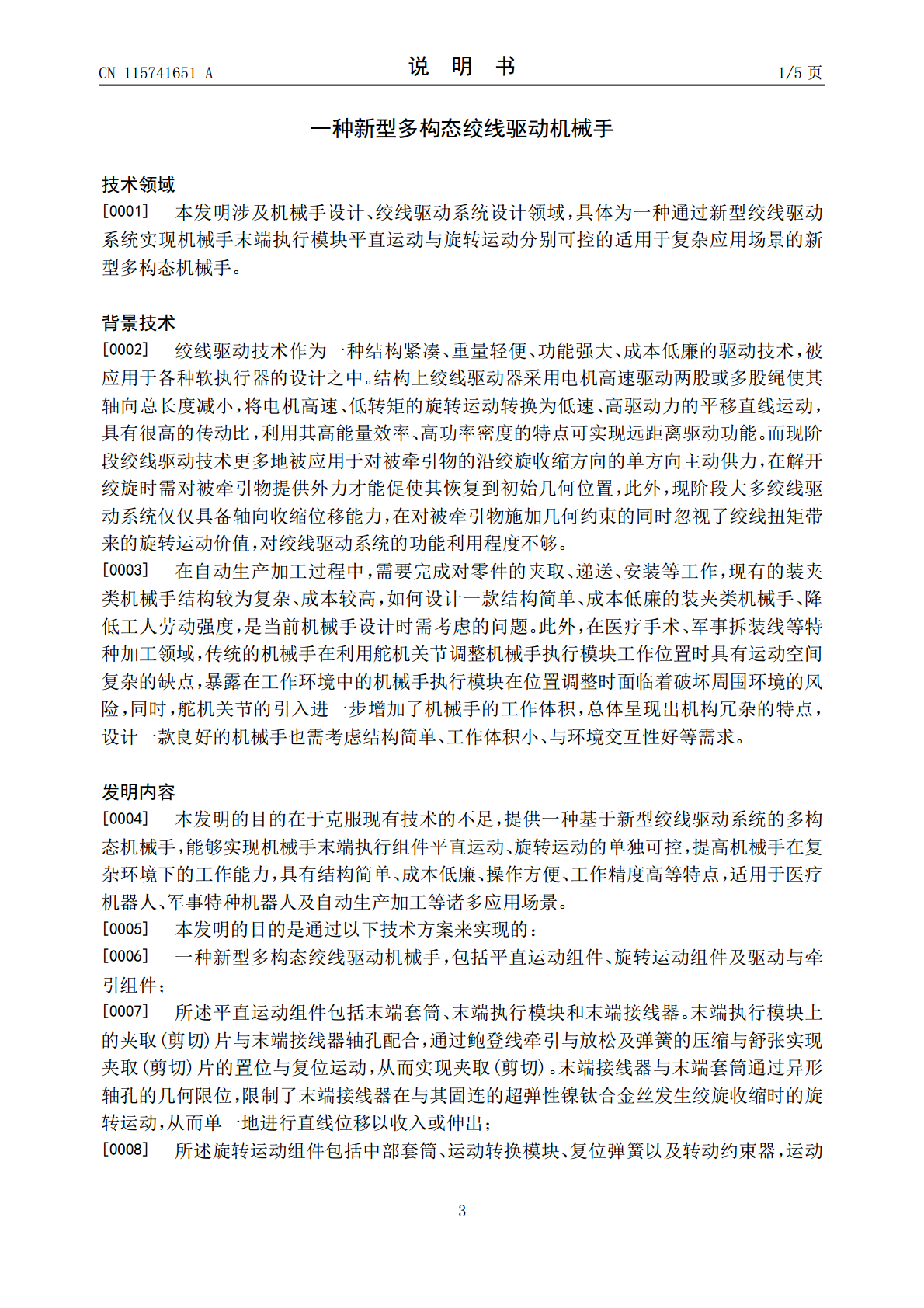
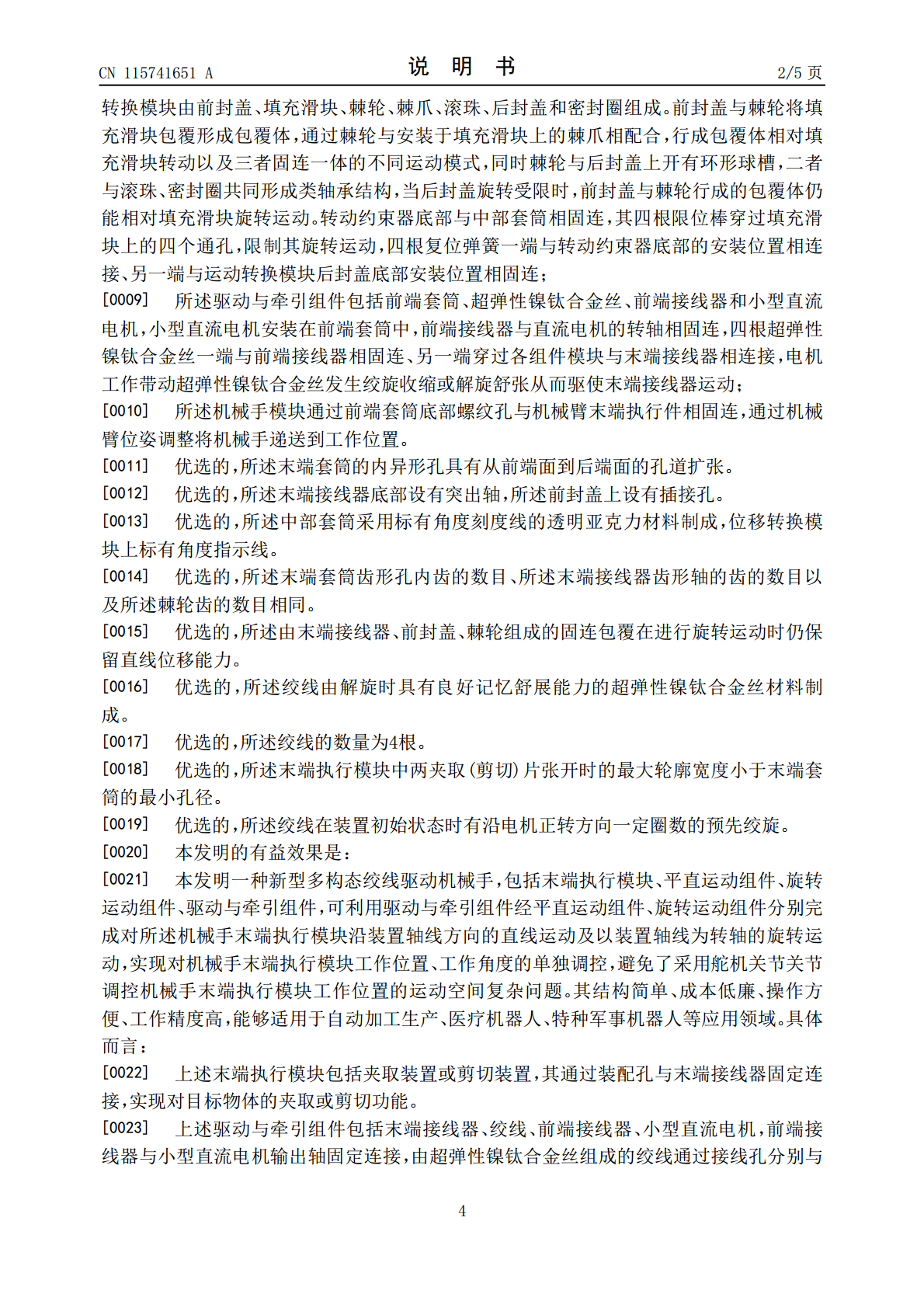
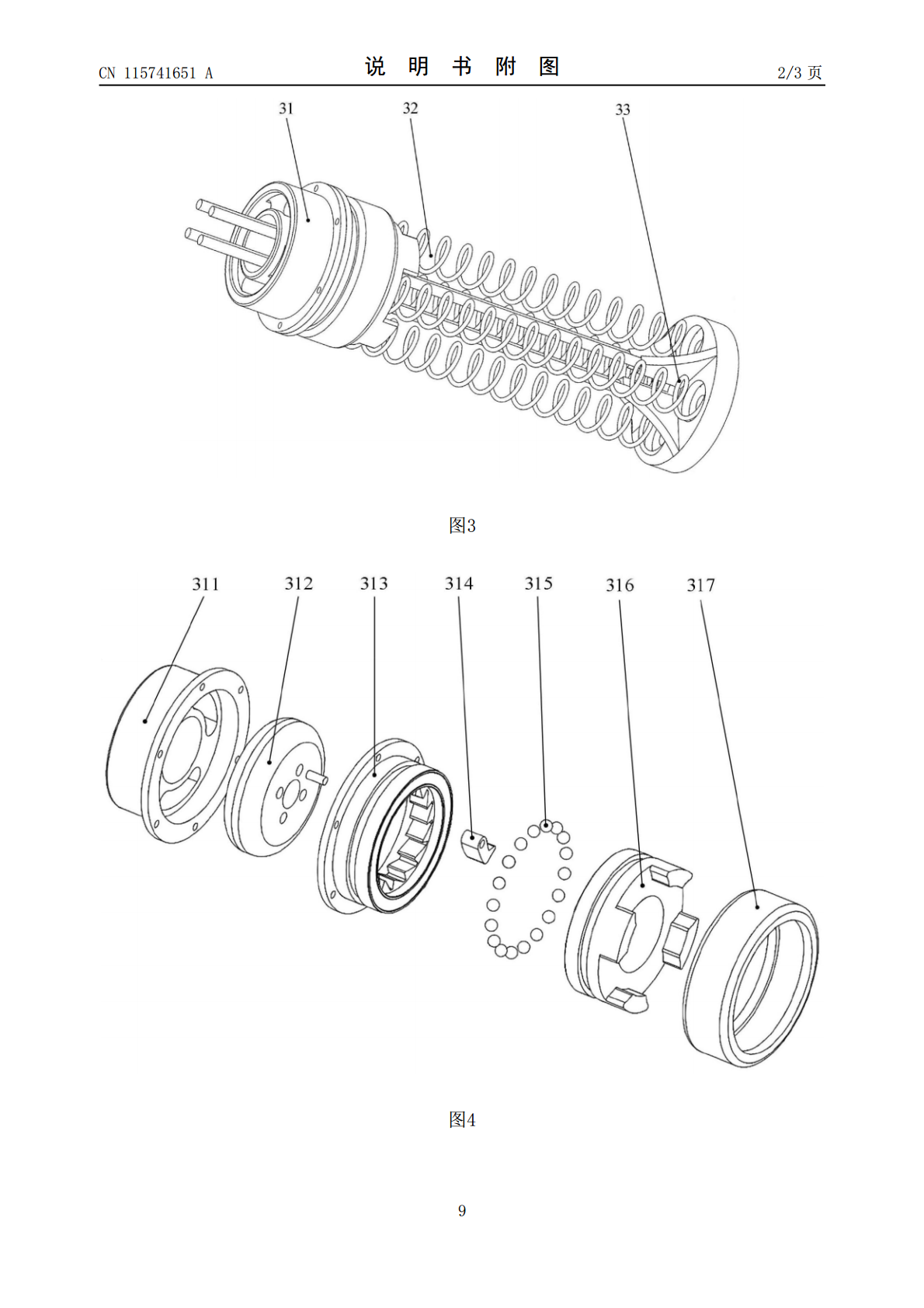
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型多构态绞线驱动机械手.pdf
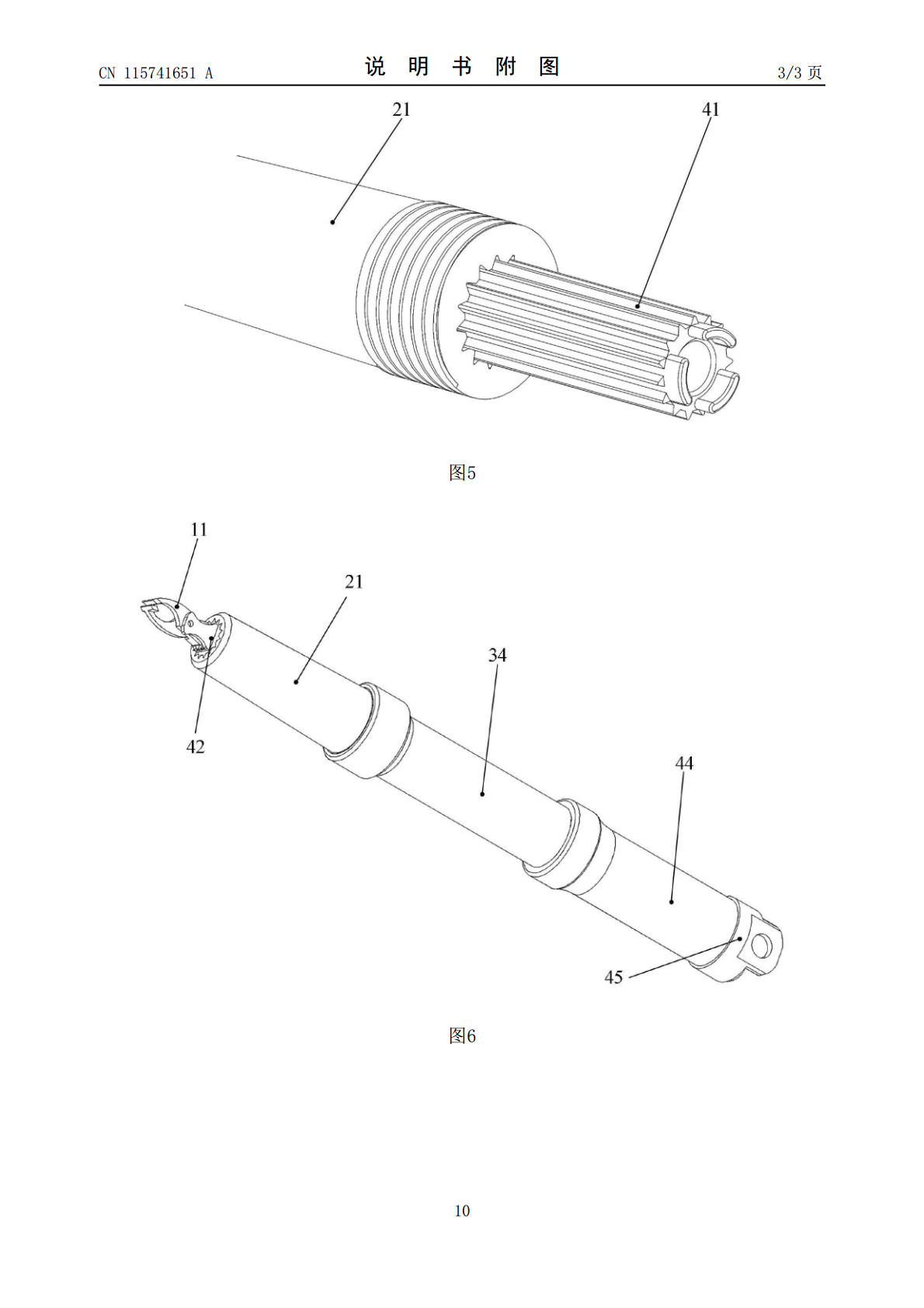
本发明提供一种基于新型绞线驱动系统的末端执行模块可进行平直运动与旋转运动的多构态机械手,涉及机械手设计领域、绞线驱动系统设计领域,包括末端执行模块、平直运动组件、旋转运动组件、驱动与牵引组件,通过各组件的协同工作实现对机械手末端执行模块平直运动、旋转运动的单独调控。本发明实现了绞线驱动系统中被牵引物平直运动与旋转运动分别调控的多构态系统特性,并将其引入到机械手的设计之中,减小了机械手的空间体积,避免了舵机关节调整机械手执行模块工作位置的运动空间复杂问题,具有结构简单、成本低廉、操作方便、工作精度高、多环境
一种新型盘式绞线机.pdf
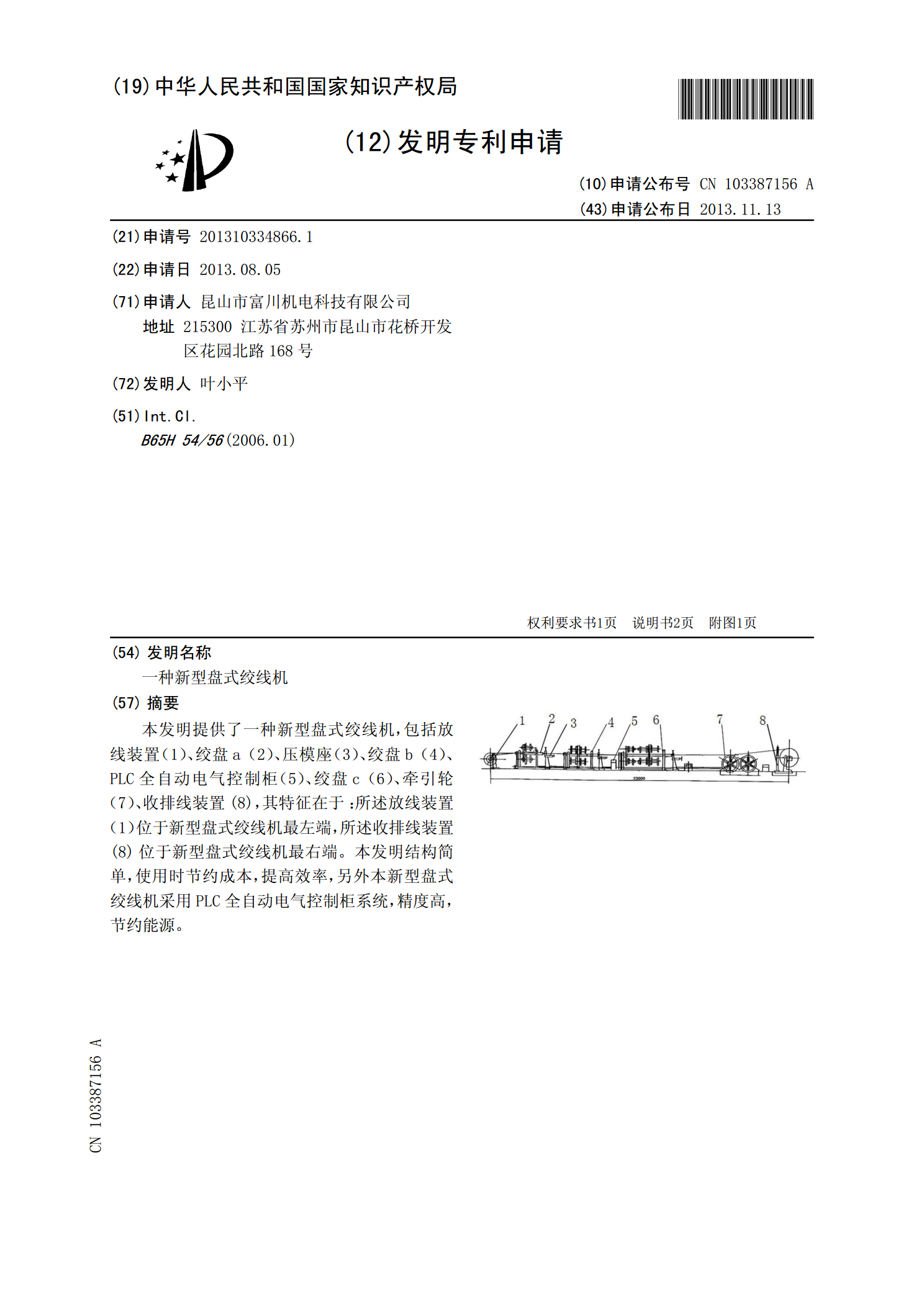
本发明提供了一种新型盘式绞线机,包括放线装置(1)、绞盘a(2)、压模座(3)、绞盘b(4)、PLC全自动电气控制柜(5)、绞盘c(6)、牵引轮(7)、收排线装置(8),其特征在于:所述放线装置(1)位于新型盘式绞线机最左端,所述收排线装置(8)位于新型盘式绞线机最右端。本发明结构简单,使用时节约成本,提高效率,另外本新型盘式绞线机采用PLC全自动电气控制柜系统,精度高,节约能源。

一种新型挂线机械手臂.pdf
本发明给出了一种新型挂线机械手臂,包括固定底座、第一伸缩臂、第二伸缩臂、第三支撑臂和挂线托盘,固定底座、第一伸缩臂、第二伸缩臂及第三支撑臂之间一次铰接连接,且在各铰接连接处均设置有一限位机构,挂线托盘固定在第三支撑臂首端,挂线托盘包括存储盘、电压试验挂线区、电流试验挂线区和光电头挂线区,在所述光电头挂线区外侧设置一排挂环。利用该机械手臂前端的挂线托盘可实现现校现场引线有序分布,同时,通过调节第一伸缩臂、第二伸缩臂和第三支撑臂的支撑角度和支撑位置,大大降低了引线受力状态,为引线的稳定连接提供了保障。
一种绞线机及其多根线张力控制装置.pdf
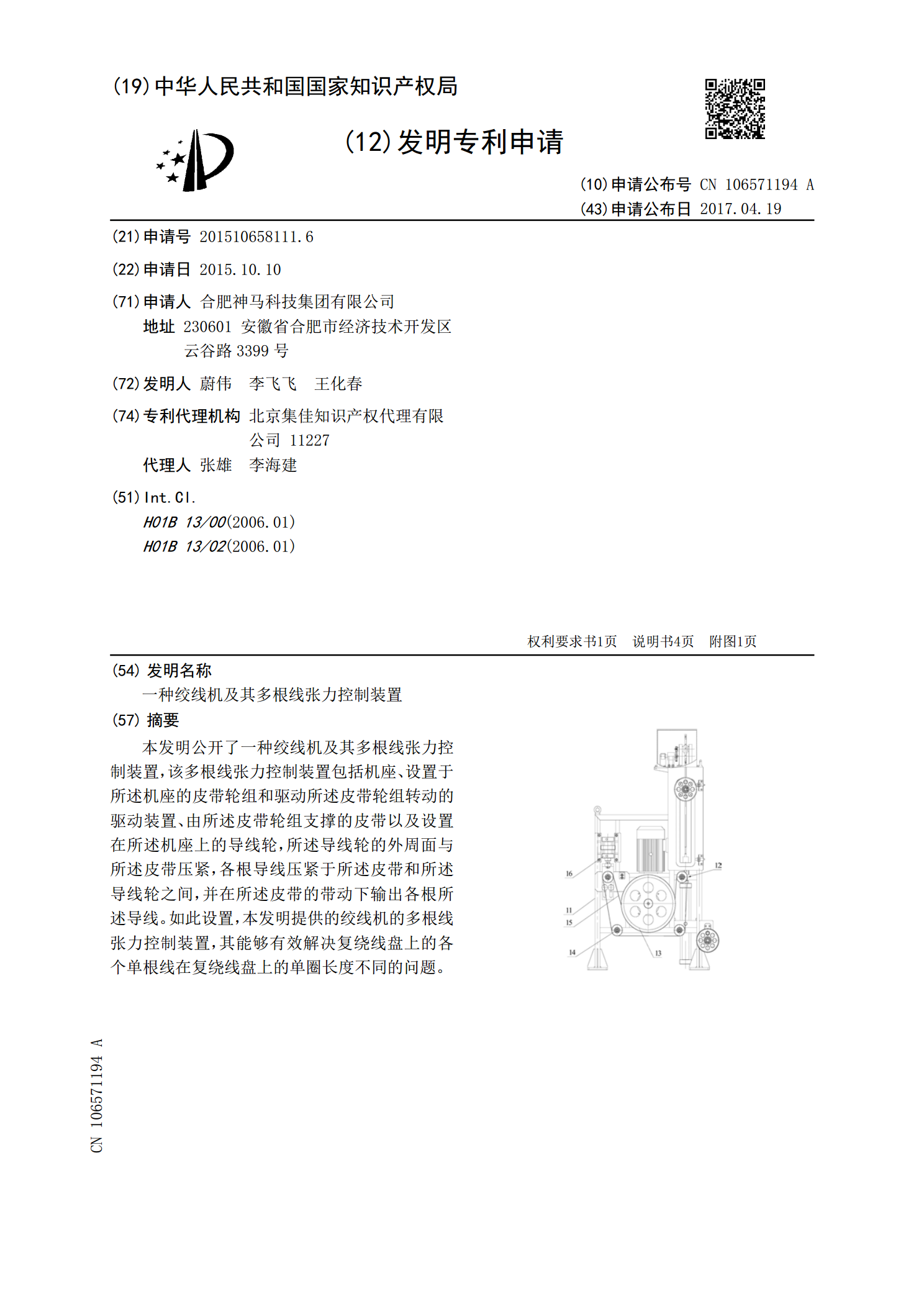
本发明公开了一种绞线机及其多根线张力控制装置,该多根线张力控制装置包括机座、设置于所述机座的皮带轮组和驱动所述皮带轮组转动的驱动装置、由所述皮带轮组支撑的皮带以及设置在所述机座上的导线轮,所述导线轮的外周面与所述皮带压紧,各根导线压紧于所述皮带和所述导线轮之间,并在所述皮带的带动下输出各根所述导线。如此设置,本发明提供的绞线机的多根线张力控制装置,其能够有效解决复绕线盘上的各个单根线在复绕线盘上的单圈长度不同的问题。
一种新型绞线切线机构及工作方法.pdf
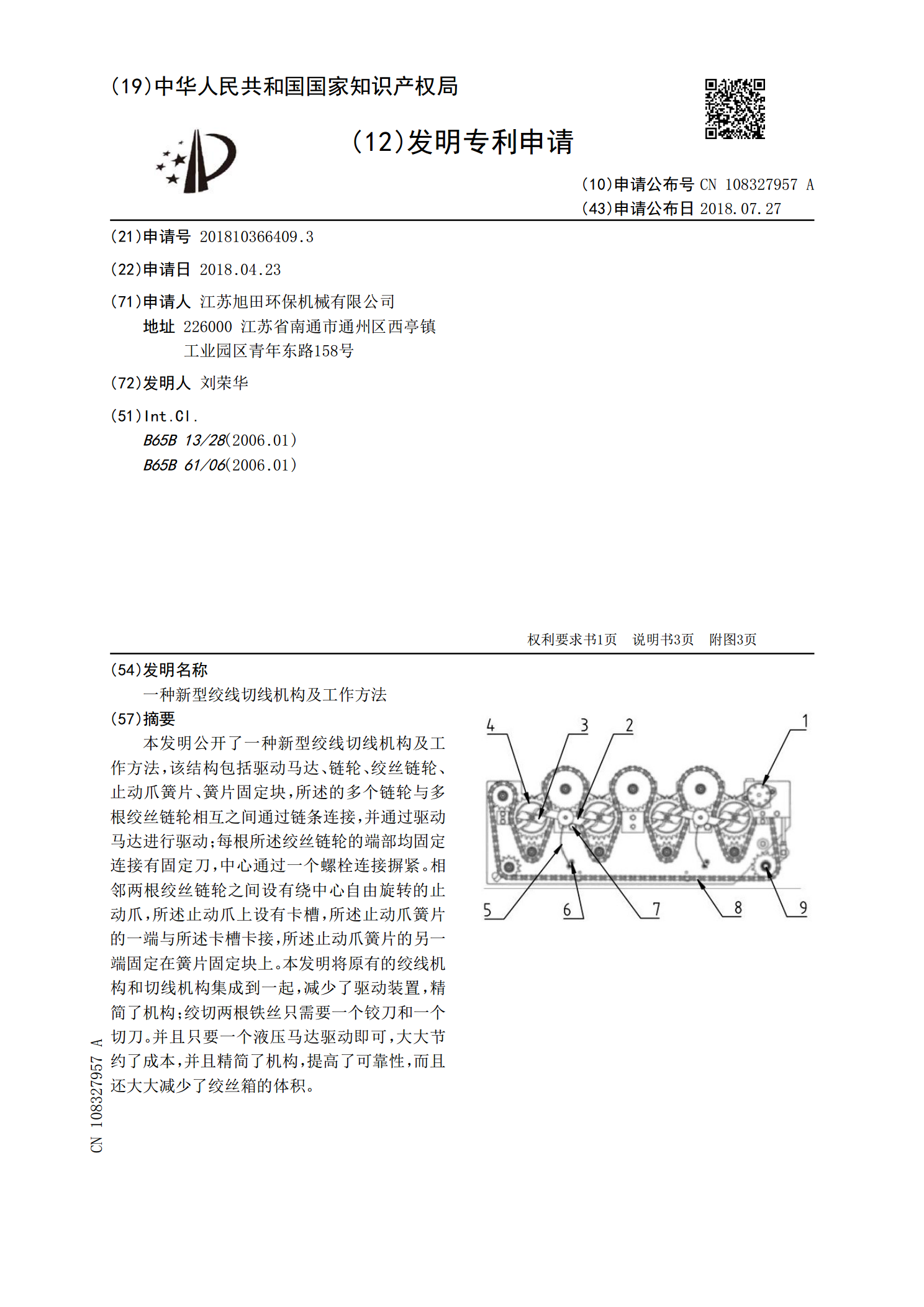
本发明公开了一种新型绞线切线机构及工作方法,该结构包括驱动马达、链轮、绞丝链轮、止动爪簧片、簧片固定块,所述的多个链轮与多根绞丝链轮相互之间通过链条连接,并通过驱动马达进行驱动;每根所述绞丝链轮的端部均固定连接有固定刀,中心通过一个螺栓连接摒紧。相邻两根绞丝链轮之间设有绕中心自由旋转的止动爪,所述止动爪上设有卡槽,所述止动爪簧片的一端与所述卡槽卡接,所述止动爪簧片的另一端固定在簧片固定块上。本发明将原有的绞线机构和切线机构集成到一起,减少了驱动装置,精简了机构;绞切两根铁丝只需要一个铰刀和一个切刀。并且只