
一种基于模型-数据混合驱动的安全边界拟合方法.pdf

Ma****57

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于模型-数据混合驱动的安全边界拟合方法.pdf
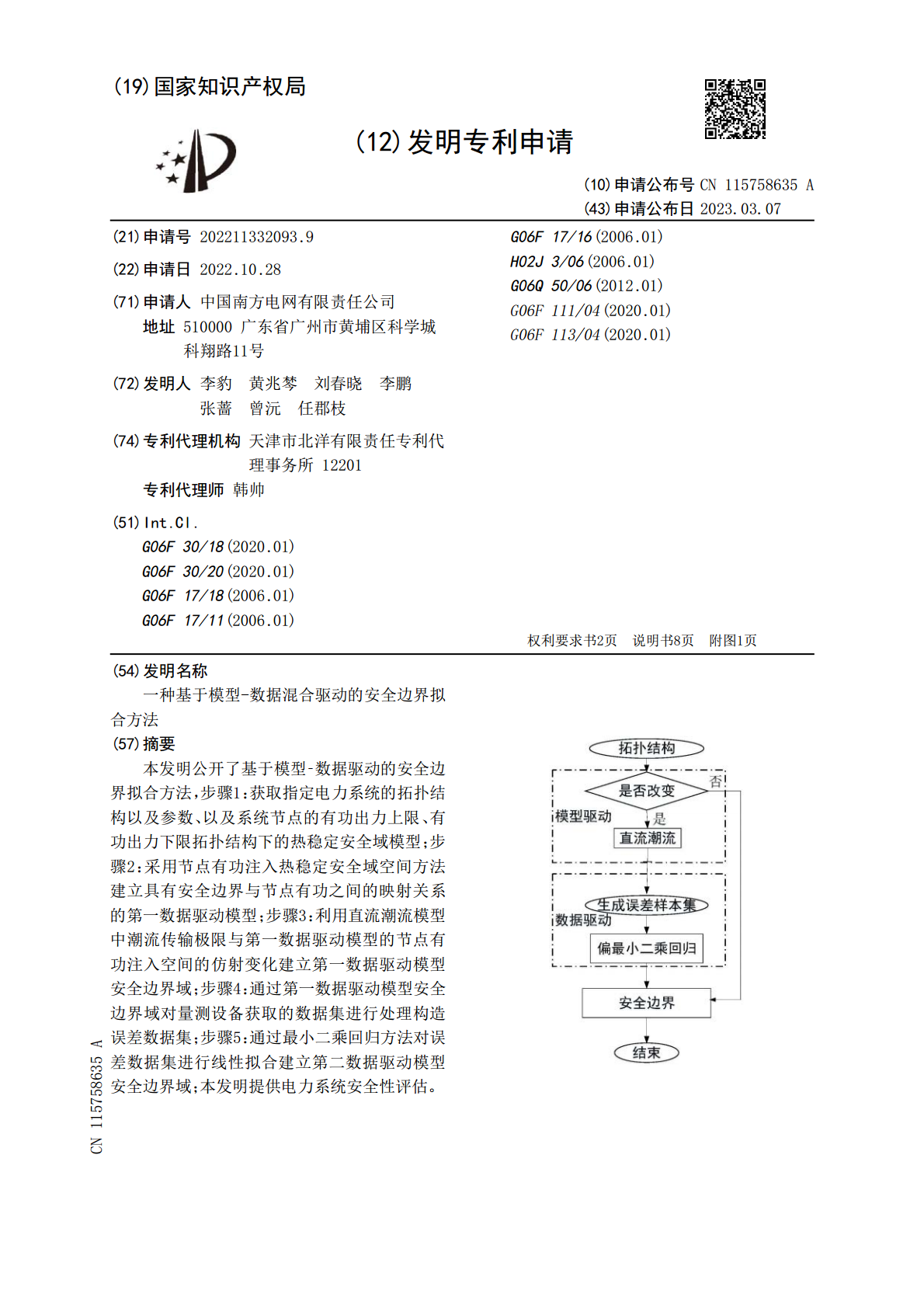
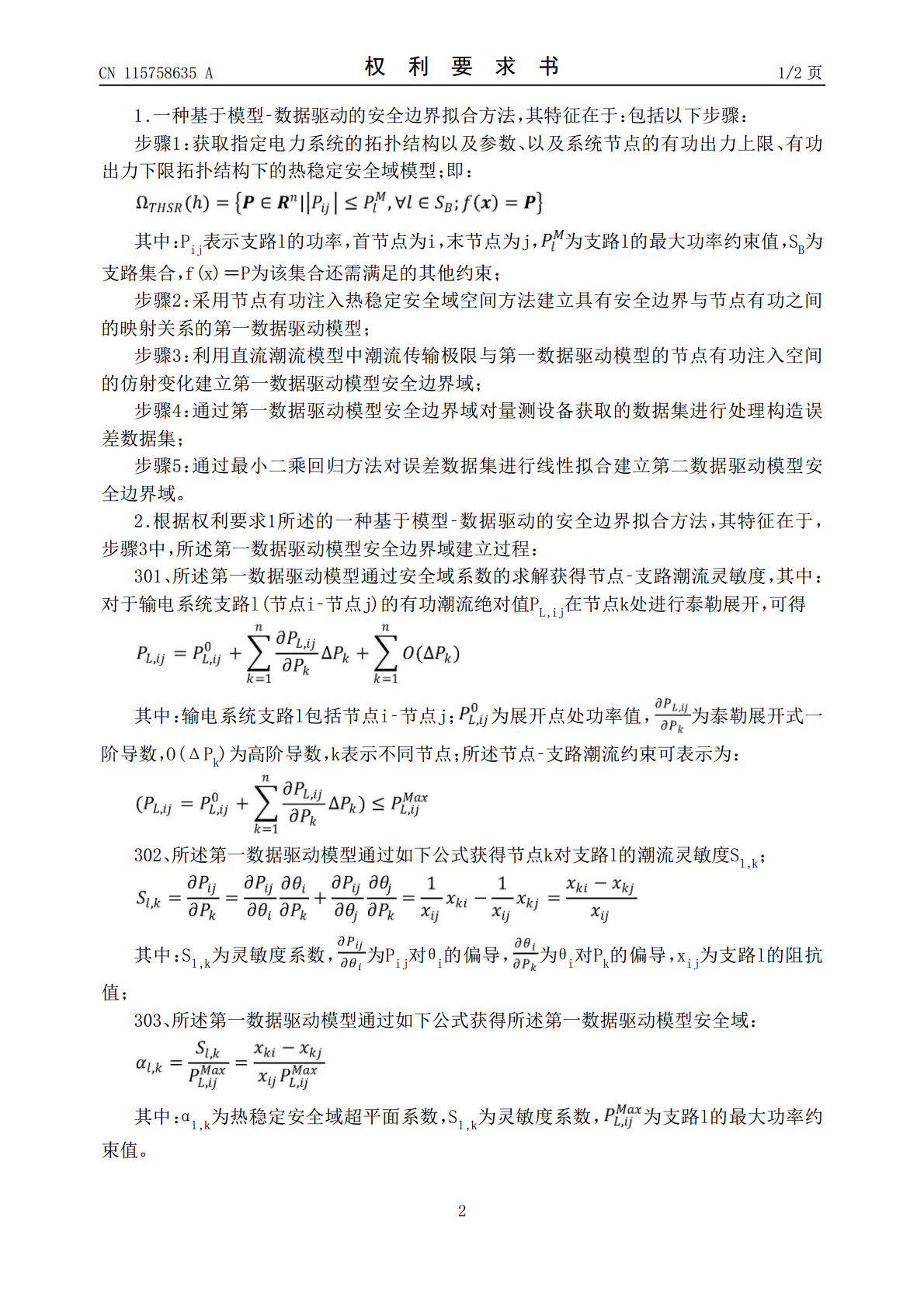
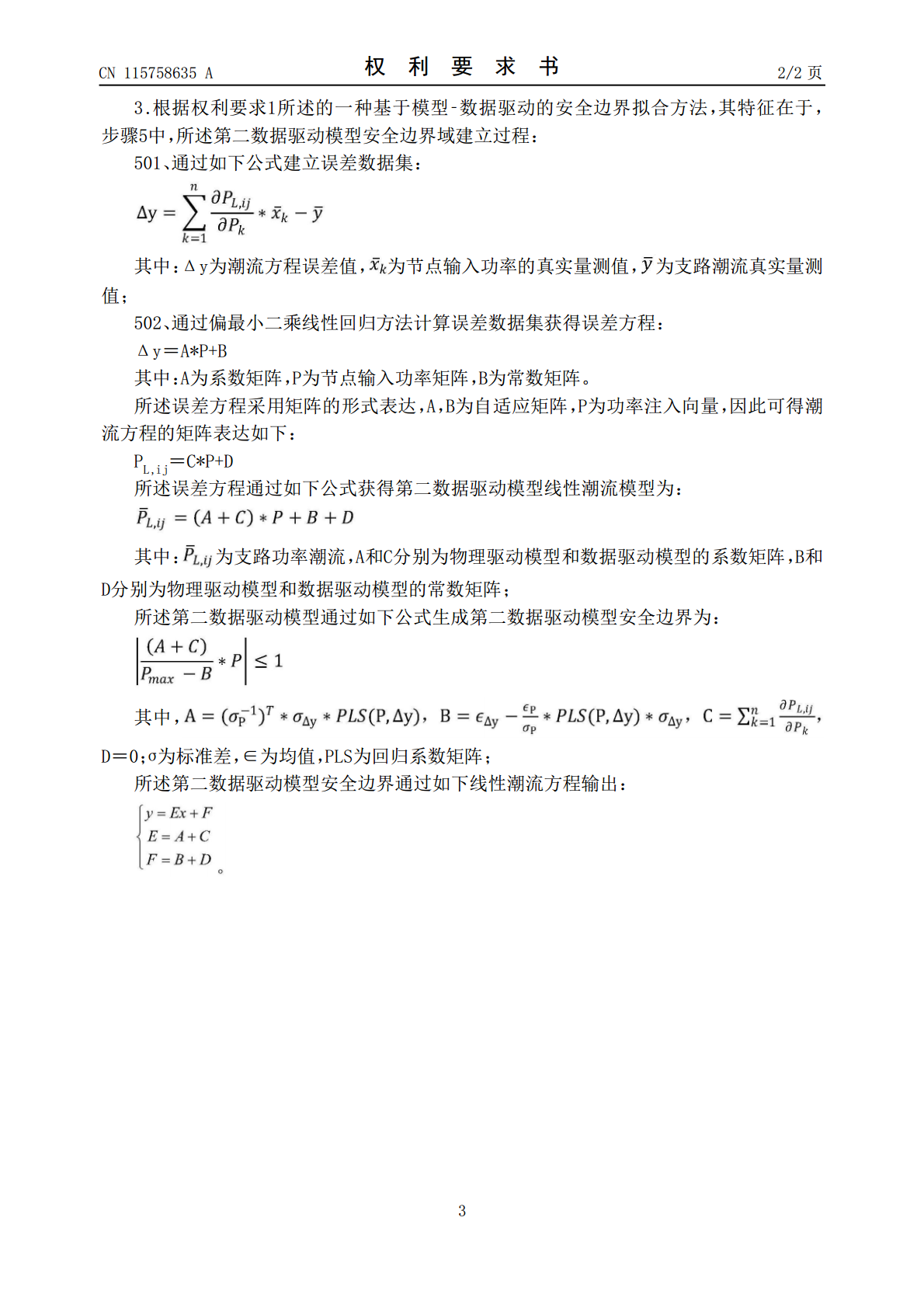
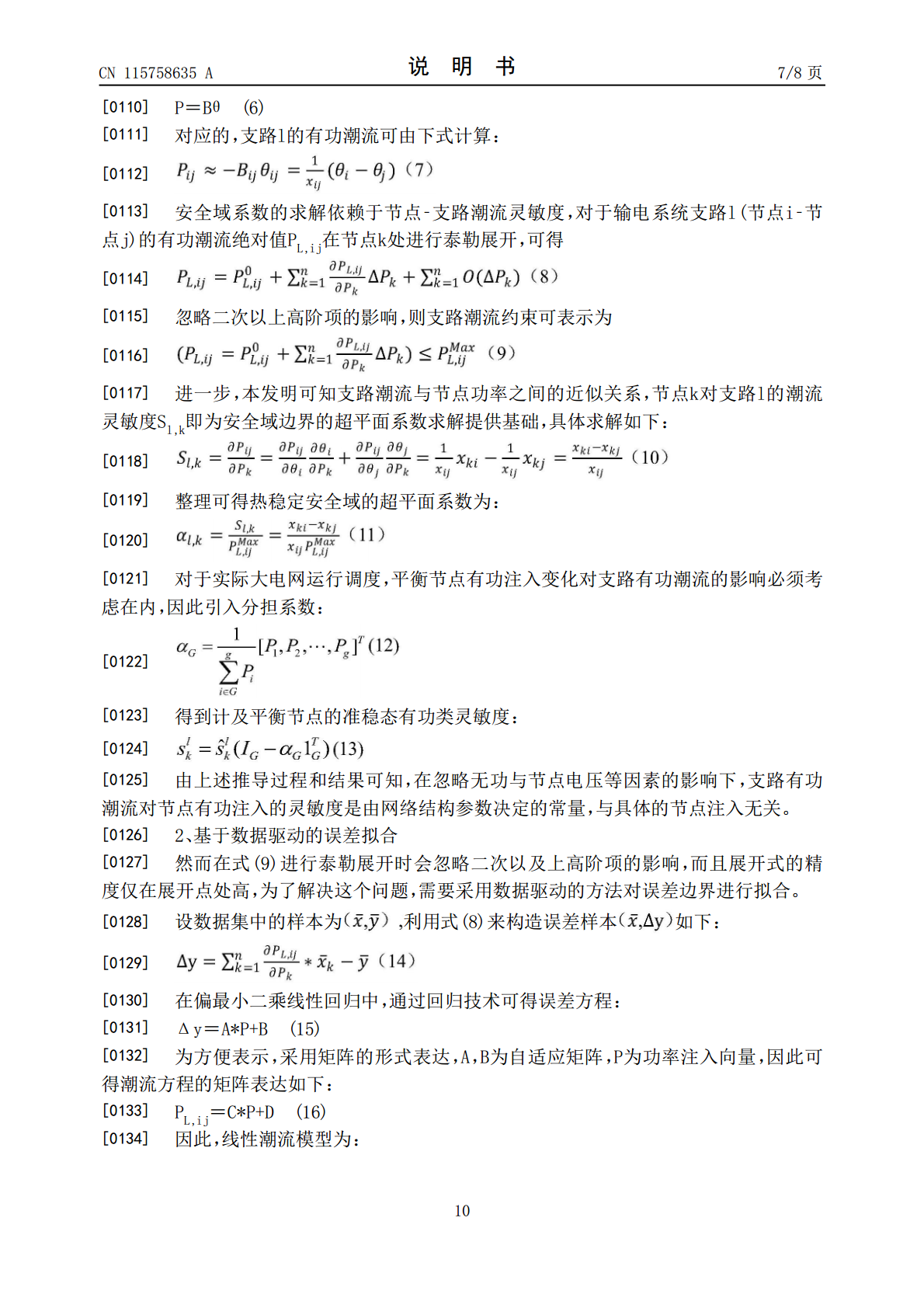
本发明公开了基于模型‑数据驱动的安全边界拟合方法,步骤1:获取指定电力系统的拓扑结构以及参数、以及系统节点的有功出力上限、有功出力下限拓扑结构下的热稳定安全域模型;步骤2:采用节点有功注入热稳定安全域空间方法建立具有安全边界与节点有功之间的映射关系的第一数据驱动模型;步骤3:利用直流潮流模型中潮流传输极限与第一数据驱动模型的节点有功注入空间的仿射变化建立第一数据驱动模型安全边界域;步骤4:通过第一数据驱动模型安全边界域对量测设备获取的数据集进行处理构造误差数据集;步骤5:通过最小二乘回归方法对误差数据集进
基于模型与数据混合驱动的电驱动系统多维载荷预测方法.pdf
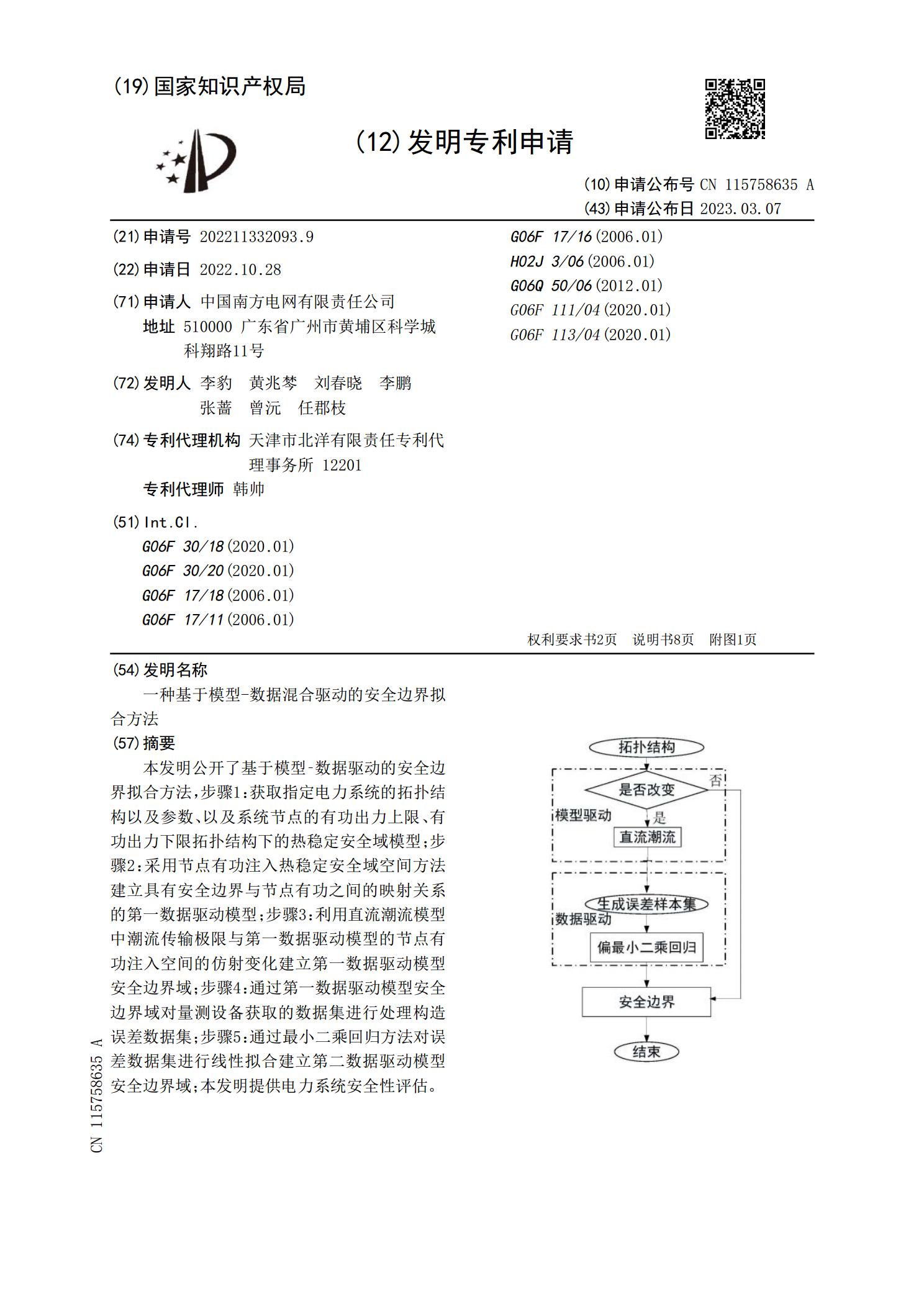
本发明公开基于模型与数据混合驱动的电驱动系统多维载荷预测方法,包括:获取实际用户运行数据,基于实际用户运行数据,分析电驱动系统的不同部件的失效机理与失效关联载荷;采用模型驱动方法提取多维失效关联载荷;采用模型与数据混合驱动方法,构建基于神经网络算法融合的电驱动系统多维载荷快速预测模型;构建载荷预测精度评价指标,验证电驱动系统多维载荷快速预测模型的有效性。本发明能够实现电驱动系统关键应力、功率损耗、时延温度等不同时间尺度的失效关联载荷预测,极大降低失效关联载荷获取的成本,为电驱动系统各部件损伤实时评估与寿命
一种基于模型和数据驱动的安全评估方法.pdf
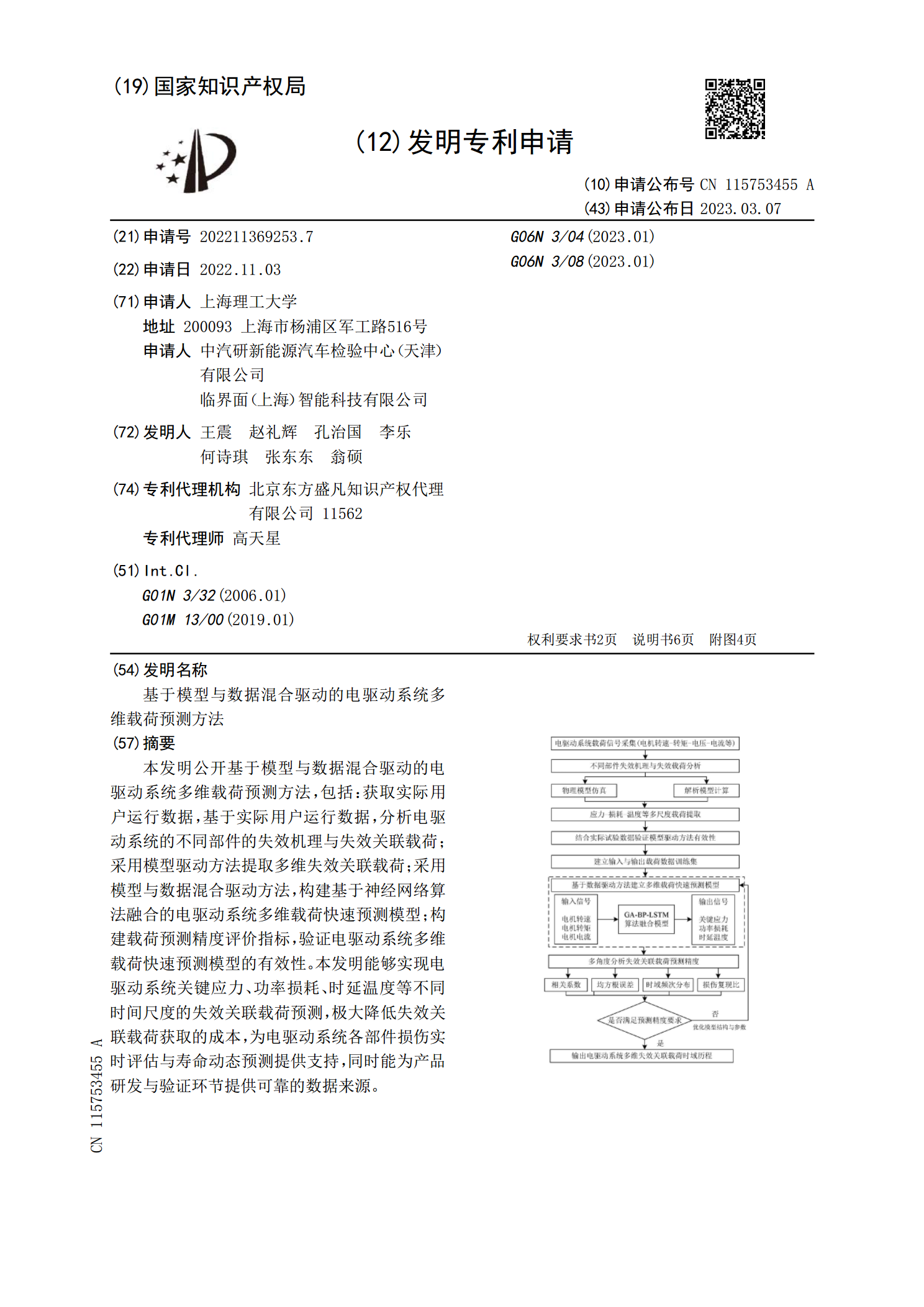
本发明提供了一种基于模型和数据驱动的安全评估方法,通过对装备、设施安全评估的需求分析、系统化设计,拆解安全评估流程关键步骤,并监测记录装备、设施在业务活动中产生的数据,搭建各类逻辑明确可推理验算的算法模型,使用户能依托全域的数据、专业的模型,完成定性指标自动对标评估、关键指标精准量化评估以及综合量化安全评估等全流程闭环,实现对某安全工作的预测预警、关联追溯和分析评估。
一种基于模型-数据混合驱动的电力工控系统动态异常检测方法.pdf
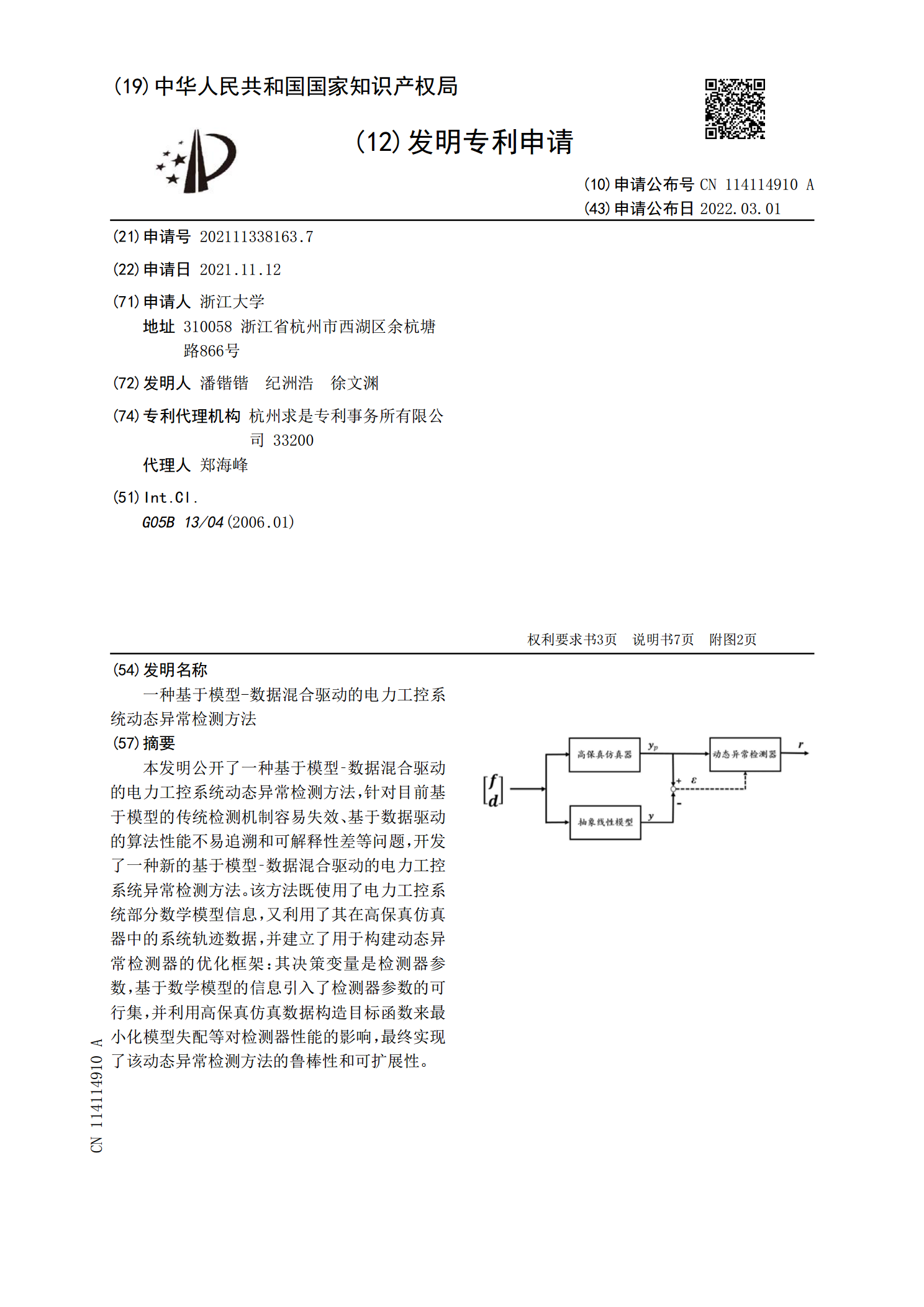
本发明公开了一种基于模型‑数据混合驱动的电力工控系统动态异常检测方法,针对目前基于模型的传统检测机制容易失效、基于数据驱动的算法性能不易追溯和可解释性差等问题,开发了一种新的基于模型‑数据混合驱动的电力工控系统异常检测方法。该方法既使用了电力工控系统部分数学模型信息,又利用了其在高保真仿真器中的系统轨迹数据,并建立了用于构建动态异常检测器的优化框架:其决策变量是检测器参数,基于数学模型的信息引入了检测器参数的可行集,并利用高保真仿真数据构造目标函数来最小化模型失配等对检测器性能的影响,最终实现了该动态异常
一种基于数据模型混合驱动的电力系统暂态仿真方法.pdf
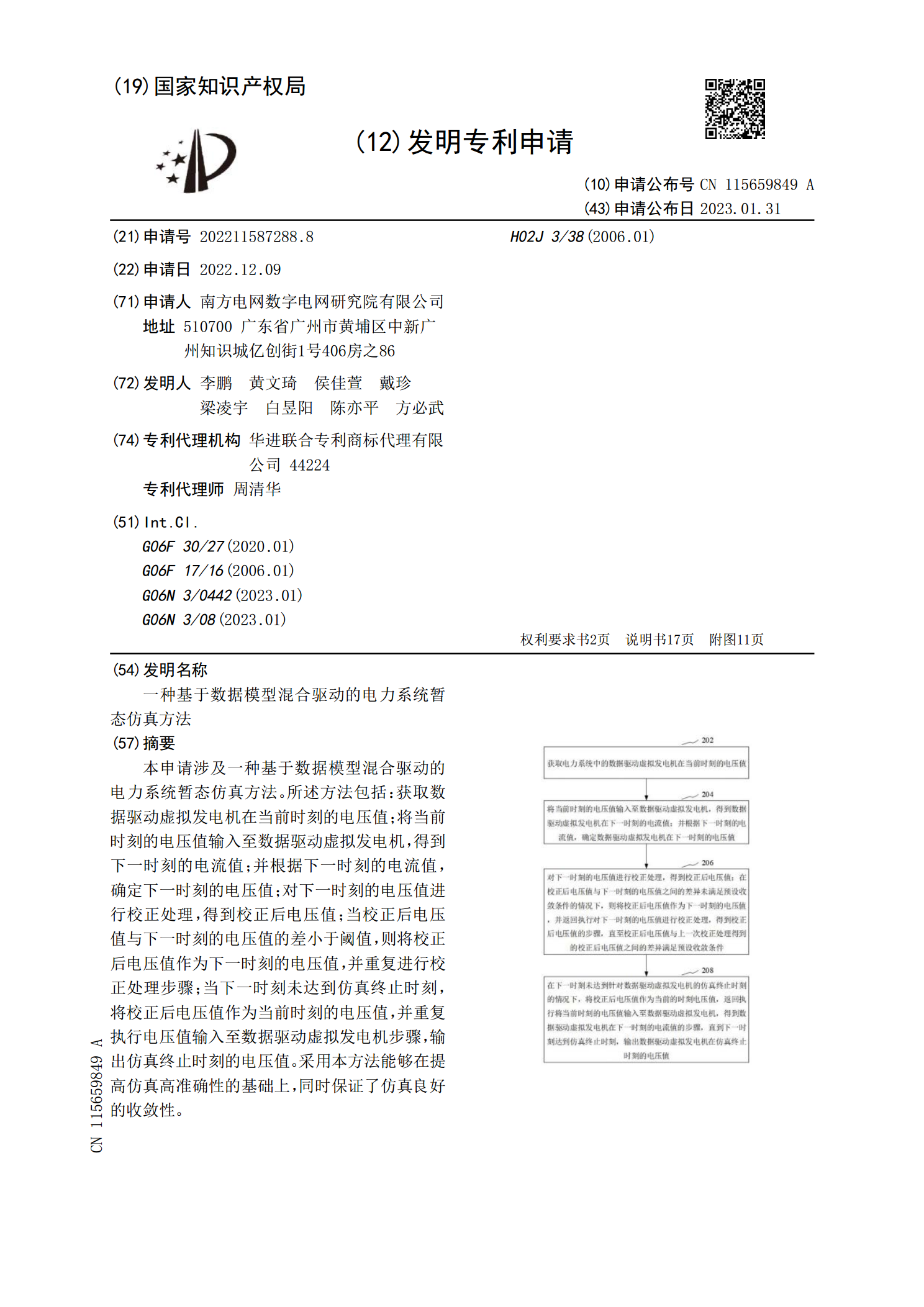
本申请涉及一种基于数据模型混合驱动的电力系统暂态仿真方法。所述方法包括:获取数据驱动虚拟发电机在当前时刻的电压值;将当前时刻的电压值输入至数据驱动虚拟发电机,得到下一时刻的电流值;并根据下一时刻的电流值,确定下一时刻的电压值;对下一时刻的电压值进行校正处理,得到校正后电压值;当校正后电压值与下一时刻的电压值的差小于阈值,则将校正后电压值作为下一时刻的电压值,并重复进行校正处理步骤;当下一时刻未达到仿真终止时刻,将校正后电压值作为当前时刻的电压值,并重复执行电压值输入至数据驱动虚拟发电机步骤,输出仿真终止时