
一种肺结节穿刺定位系统及其使用方法.pdf

一吃****春晓

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种肺结节穿刺定位系统及其使用方法.pdf
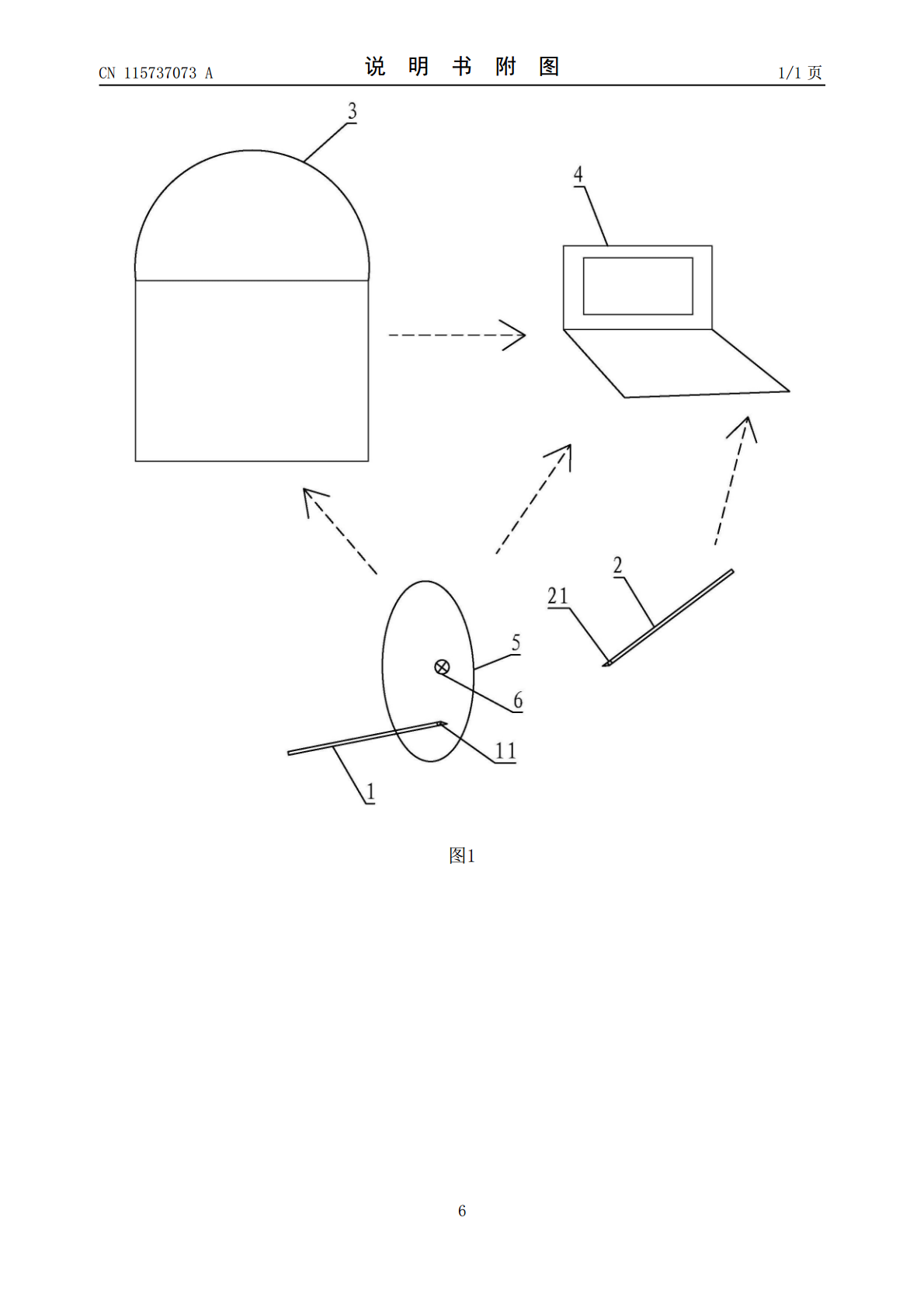
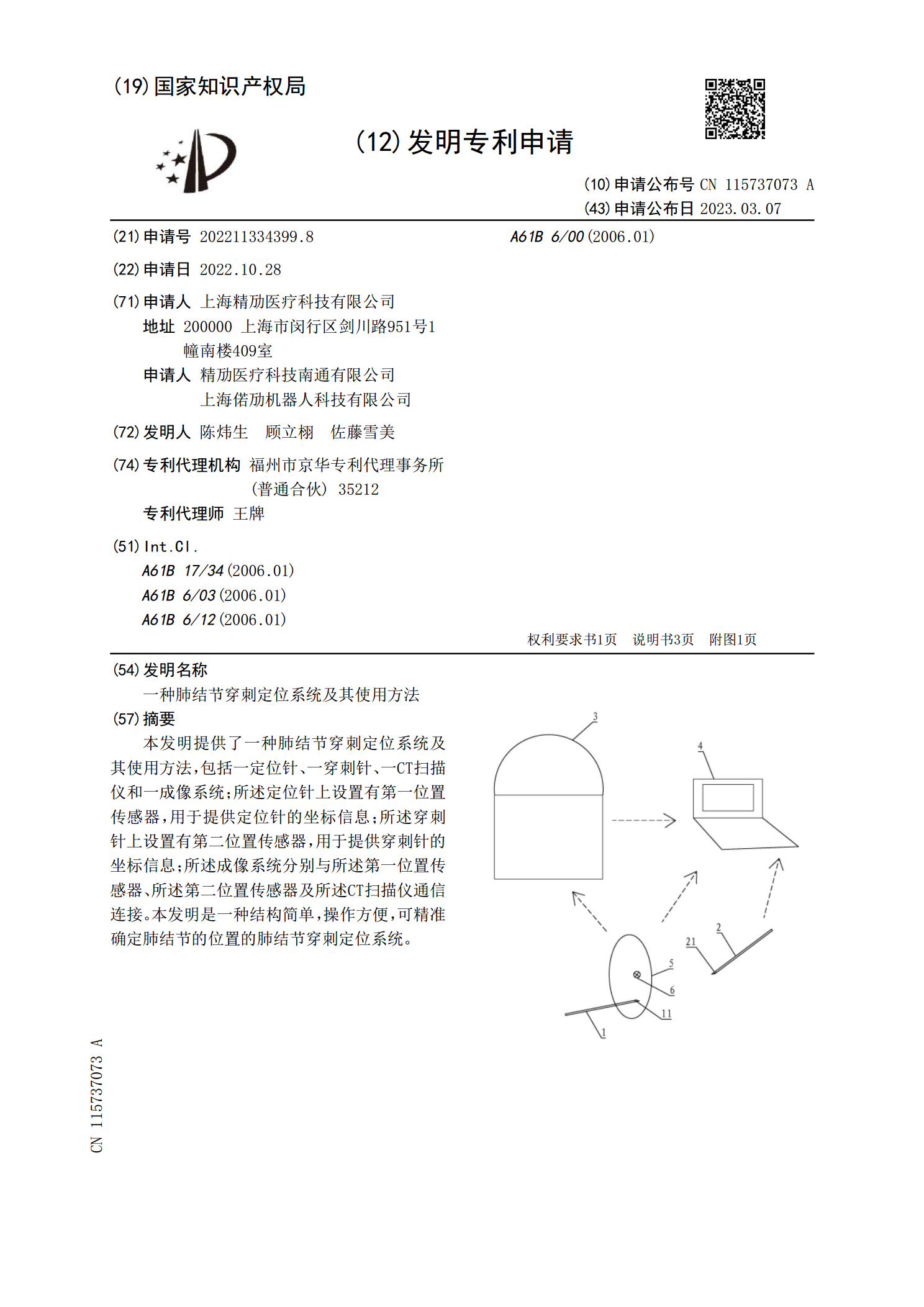
本发明提供了一种肺结节穿刺定位系统及其使用方法,包括一定位针、一穿刺针、一CT扫描仪和一成像系统;所述定位针上设置有第一位置传感器,用于提供定位针的坐标信息;所述穿刺针上设置有第二位置传感器,用于提供穿刺针的坐标信息;所述成像系统分别与所述第一位置传感器、所述第二位置传感器及所述CT扫描仪通信连接。本发明是一种结构简单,操作方便,可精准确定肺结节的位置的肺结节穿刺定位系统。
一种肺结节穿刺定位套包.pdf
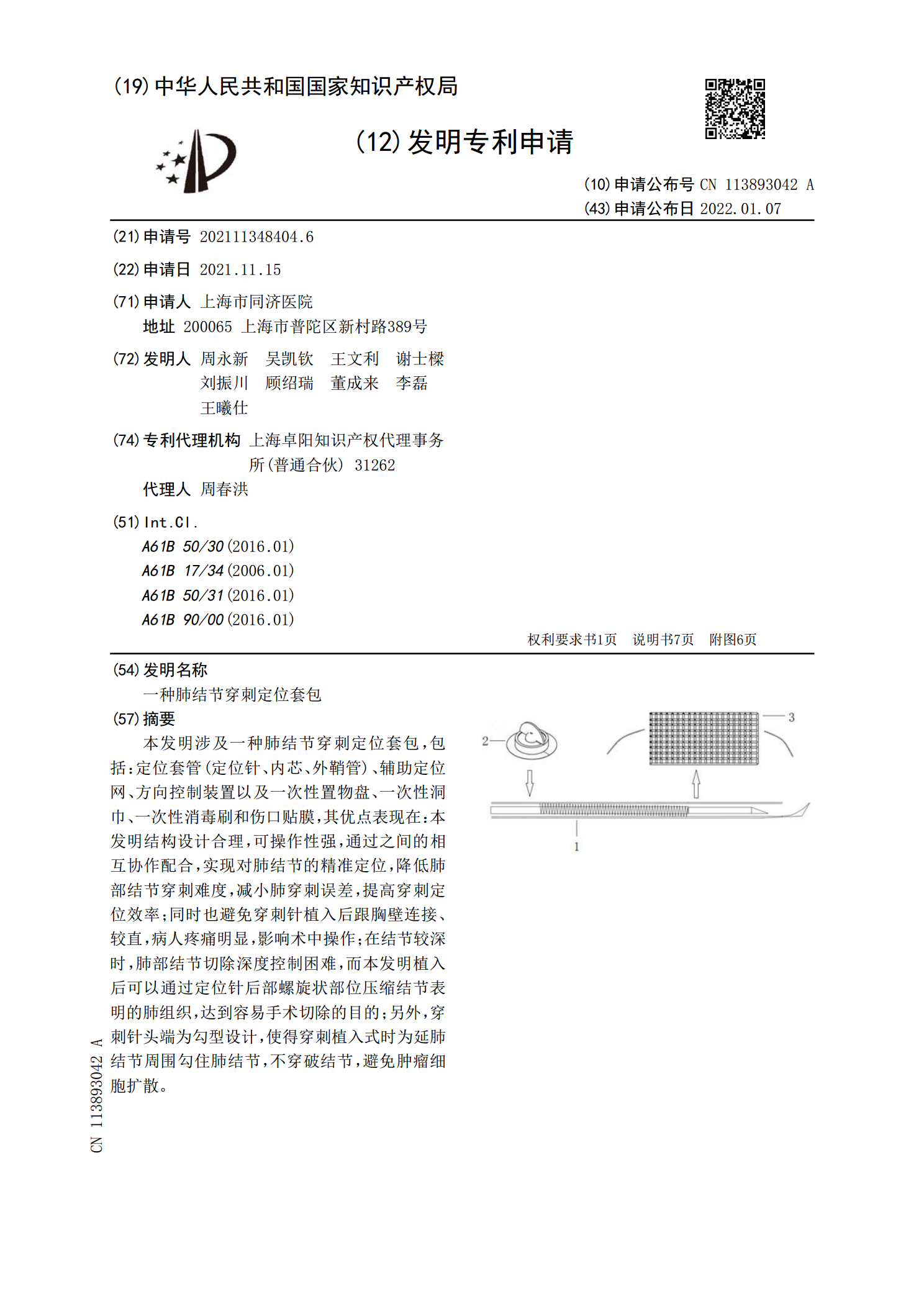
本发明涉及一种肺结节穿刺定位套包,包括:定位套管(定位针、内芯、外鞘管)、辅助定位网、方向控制装置以及一次性置物盘、一次性洞巾、一次性消毒刷和伤口贴膜,其优点表现在:本发明结构设计合理,可操作性强,通过之间的相互协作配合,实现对肺结节的精准定位,降低肺部结节穿刺难度,减小肺穿刺误差,提高穿刺定位效率;同时也避免穿刺针植入后跟胸壁连接、较直,病人疼痛明显,影响术中操作;在结节较深时,肺部结节切除深度控制困难,而本发明植入后可以通过定位针后部螺旋状部位压缩结节表明的肺组织,达到容易手术切除的目的;另外,穿刺针
一种用于肺结节穿刺定位的装置.pdf
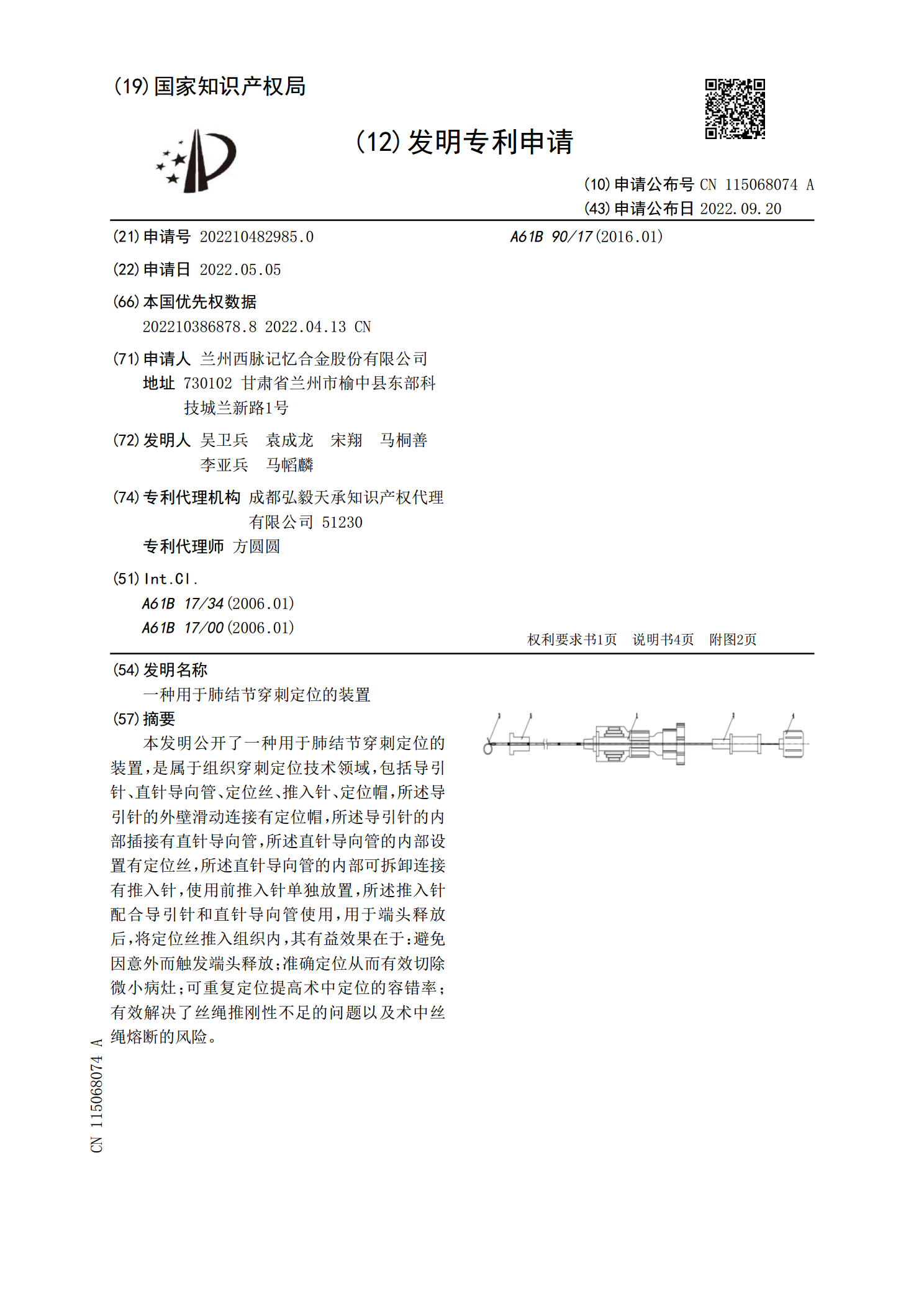
本发明公开了一种用于肺结节穿刺定位的装置,是属于组织穿刺定位技术领域,包括导引针、直针导向管、定位丝、推入针、定位帽,所述导引针的外壁滑动连接有定位帽,所述导引针的内部插接有直针导向管,所述直针导向管的内部设置有定位丝,所述直针导向管的内部可拆卸连接有推入针,使用前推入针单独放置,所述推入针配合导引针和直针导向管使用,用于端头释放后,将定位丝推入组织内,其有益效果在于:避免因意外而触发端头释放;准确定位从而有效切除微小病灶;可重复定位提高术中定位的容错率;有效解决了丝绳推刚性不足的问题以及术中丝绳熔断的风

肺小结节穿刺定位装置.pdf
本发明提供一种肺小结节穿刺定位装置,包括定位针,所述定位针包括定位针管、手柄、定位组件及推送组件,手柄连接于定位针管的第一端,定位组件设于定位针管的内部,推送组件设于定位针管的内部及手柄的内部,且推送组件具有露出手柄的外表面的推送键,通过推动推送键,推送组件能推送定位组件由定位针管的第二端伸出至定位针管的外部,定位针管的第二端为具有与定位针管的径向形成预定夹角的斜面的尖端,或者定位针管的第二端为具有与定位针管的径向平行的平面的平端。本发明提供的肺小结节穿刺定位装置,专用于肺部小结节的穿刺定位,能有效避免现

一种肺结节穿刺导航系统.pdf
本发明涉及医疗设备技术领域,尤其涉及一种肺结节穿刺导航系统。该系统包括:三维可视化显示单元、粗配准单元、精配准单元和导航跟踪单元;三维可视化显示单元用于分别显示患者的肺三维模型、肺结节三维模型、胸廓三维模型和皮肤三维模型;粗配准单元用于在患者胸廓上和胸廓三维模型上分别采集解剖位置点的信息,并将两种解剖位置点的信息进行配准;精配准单元用于将患者皮肤的点云模型与皮肤三维模型进行配准,点云模型为通过定位工具实时采集的患者体表皮肤的轮廓信息;导航跟踪单元包括用于实时导航跟踪定位工具在患者体表上的位置的红外跟踪系统