
基于高低频麦克阵列的组合结构界面损伤测试方法及系统.pdf

努力****南绿

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于高低频麦克阵列的组合结构界面损伤测试方法及系统.pdf
本发明公开了一种基于高低频麦克阵列的组合结构界面损伤测试方法及系统,所述方法包括:利用设置有自动力锤的爬行机器人作为激励装置,敲击组合结构的待检测表面以产生重复性脉冲激励信号;在组合结构的待检测表面上方设置至少一个低频麦克风和高频麦克风阵列作为感应装置,对待检测表面产生的应力波进行检测;其中,高频麦克风阵列包括多个高频麦克风,一方面用于进行冲击‑声振测试,实现对组合结构界面损伤的快速评估,一方面用于进行多道面波测试,实现对组合结构界面损伤的精细化检测;低频麦克风用于校验高频麦克风阵列测试数据的准确性。本发
基于磁吸传感器阵列的组合结构界面损伤检测方法及系统.pdf
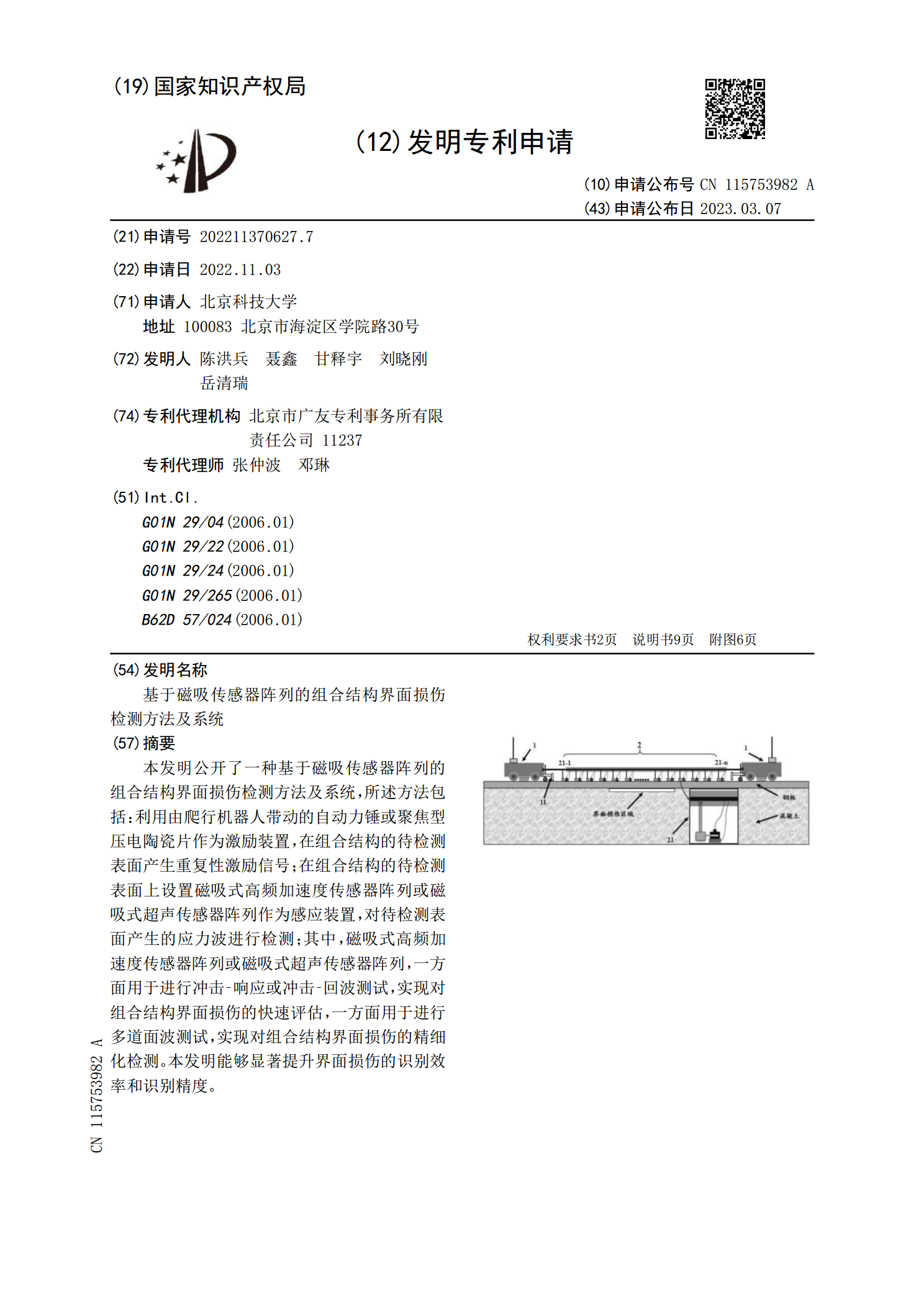
本发明公开了一种基于磁吸传感器阵列的组合结构界面损伤检测方法及系统,所述方法包括:利用由爬行机器人带动的自动力锤或聚焦型压电陶瓷片作为激励装置,在组合结构的待检测表面产生重复性激励信号;在组合结构的待检测表面上设置磁吸式高频加速度传感器阵列或磁吸式超声传感器阵列作为感应装置,对待检测表面产生的应力波进行检测;其中,磁吸式高频加速度传感器阵列或磁吸式超声传感器阵列,一方面用于进行冲击‑响应或冲击‑回波测试,实现对组合结构界面损伤的快速评估,一方面用于进行多道面波测试,实现对组合结构界面损伤的精细化检测。本发
基于SQUID阵列的低频透地通信系统及方法.pdf
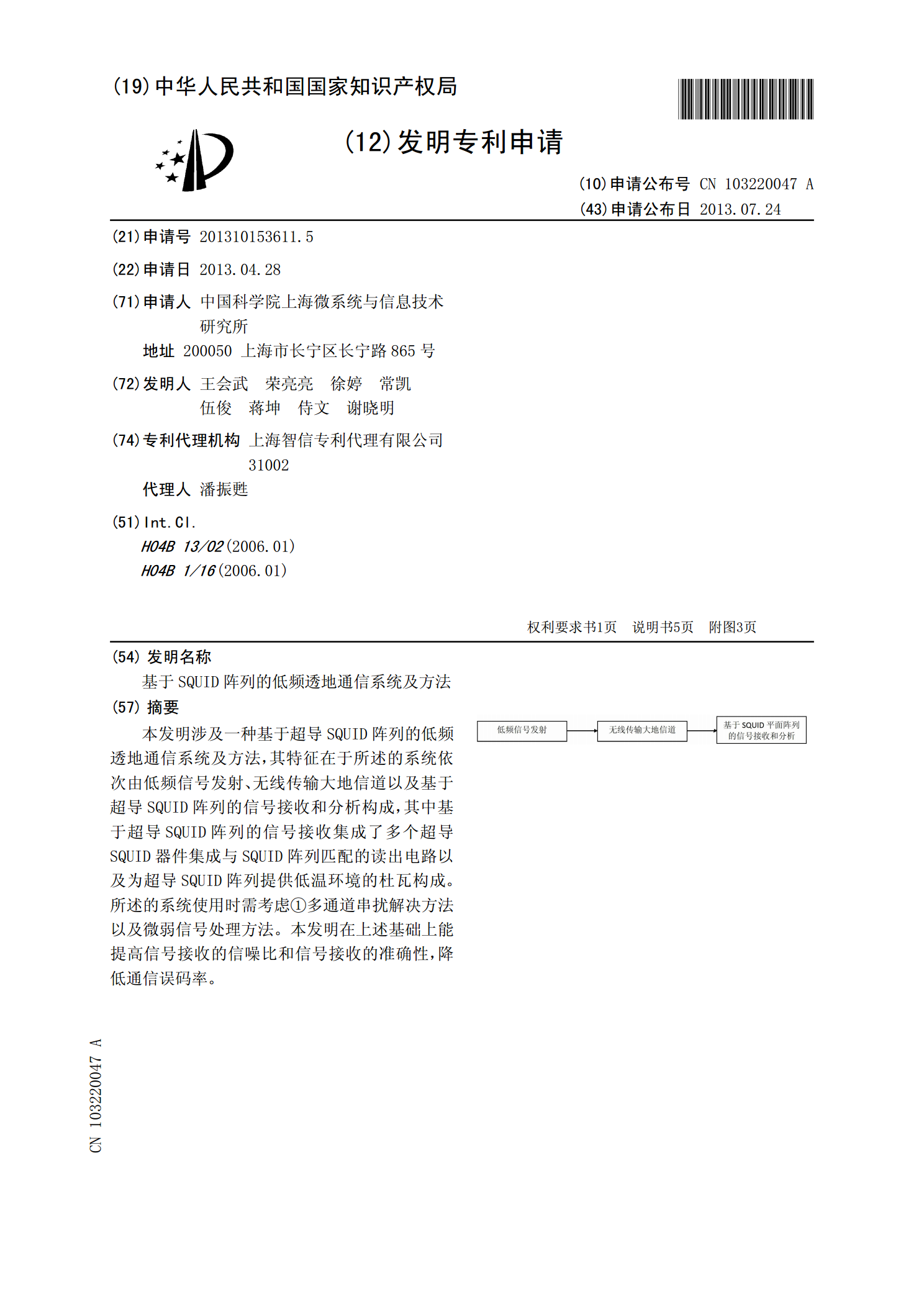
本发明涉及一种基于超导SQUID阵列的低频透地通信系统及方法,其特征在于所述的系统依次由低频信号发射、无线传输大地信道以及基于超导SQUID阵列的信号接收和分析构成,其中基于超导SQUID阵列的信号接收集成了多个超导SQUID器件集成与SQUID阵列匹配的读出电路以及为超导SQUID阵列提供低温环境的杜瓦构成。所述的系统使用时需考虑①多通道串扰解决方法以及微弱信号处理方法。本发明在上述基础上能提高信号接收的信噪比和信号接收的准确性,降低通信误码率。

一种基于阵列结构的低频信号产生方法.pdf
本公开提供了一种基于阵列结构的低频信号产生方法,包括:百米量级阵列结构中各辐射单元以一定的时间间隔由阵列近端至远端依次顺序发射脉冲信号,等效雷达以近光速远离目标运动;根据电磁波多普勒效应设置辐射单元信号的相位,由相邻辐射单元发射信号的时间间隔和波程差实现目标区辐射单元信号包络的移动;通过辐射单元信号相位调制或多行阵列错位排布构建交错阵列的方式,使得目标区空间等效形成的相位在快时间快速变化,单个载波周期时间内即多次发生改变,由此合成低频信号,且合成信号的脉宽相对于辐射单元信号展宽;在交错阵列的情况下,辐射单

麦克风阵列论文:基于麦克风阵列的语音增强系统设计.doc
麦克风阵列论文:基于麦克风阵列的语音增强系统设计【中文摘要】语音增强的是去除语音信息中的噪声成分,它是语音信号处理领域中主要的研究内容之一。然而,由于声源环境往往较为复杂,一般单一麦克风很难清晰的从环境中获取期望语音信号并进行增强处理。因此,需要进行有效的噪声抑制,以增强语音信号的质量。本文对基于麦克风阵列的语音增强算法进行研究,重点分析了时延估计和波束形成两种技术。在时延估计方面,研究了相位变换加权的广义互相关时延估计算法性能,介绍了将广义互相关算法由双麦克风扩展应用至多麦克风的优化方法,给出了算法在0