
AMT离合器位置控制方法及装置.pdf

是雁****找我

1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
AMT离合器位置控制方法及装置.pdf
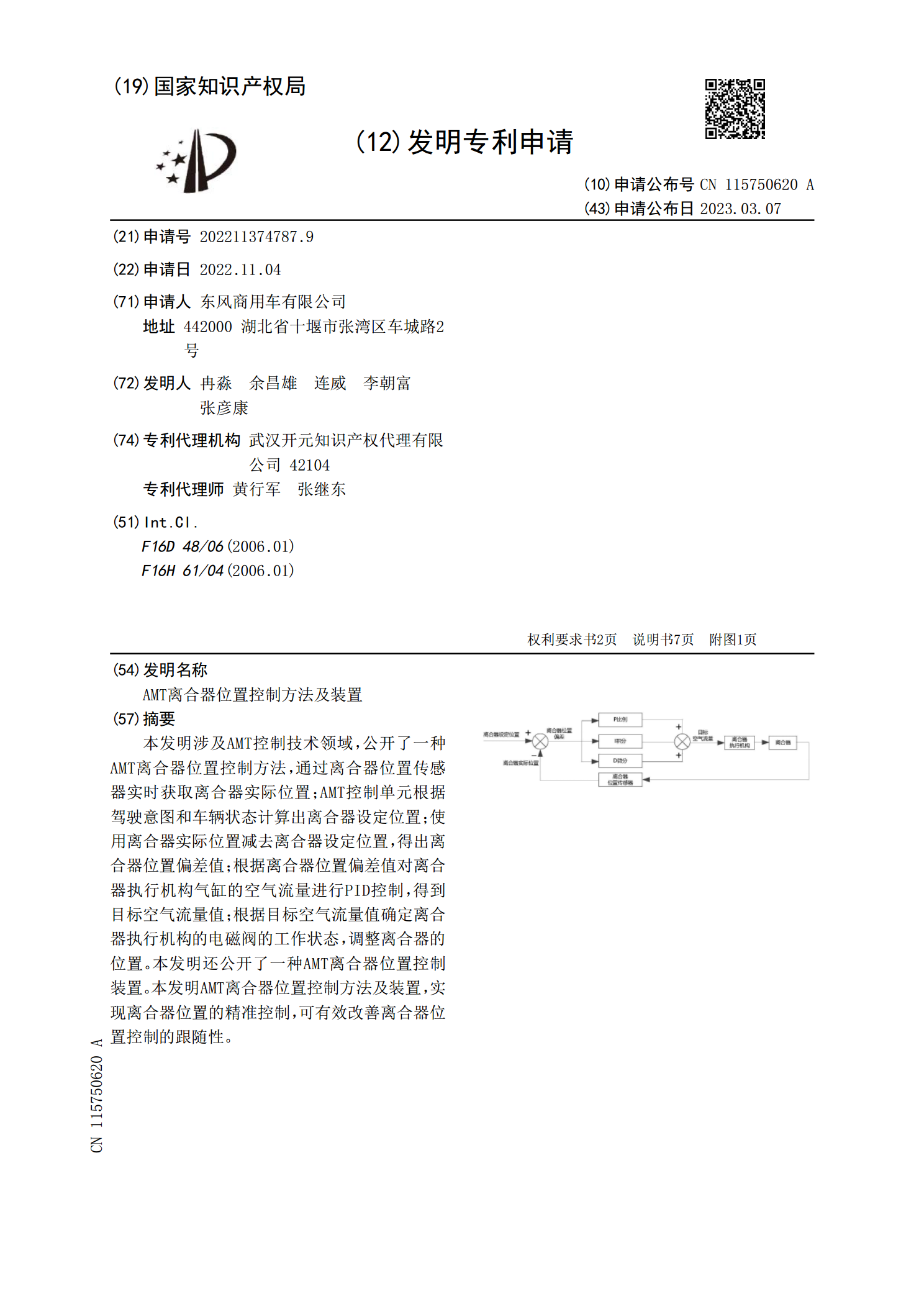
本发明涉及AMT控制技术领域,公开了一种AMT离合器位置控制方法,通过离合器位置传感器实时获取离合器实际位置;AMT控制单元根据驾驶意图和车辆状态计算出离合器设定位置;使用离合器实际位置减去离合器设定位置,得出离合器位置偏差值;根据离合器位置偏差值对离合器执行机构气缸的空气流量进行PID控制,得到目标空气流量值;根据目标空气流量值确定离合器执行机构的电磁阀的工作状态,调整离合器的位置。本发明还公开了一种AMT离合器位置控制装置。本发明AMT离合器位置控制方法及装置,实现离合器位置的精准控制,可有效改善离合

AMT离合器控制方法与试验研究.docx
AMT离合器控制方法与试验研究标题:AMT离合器控制方法与试验研究摘要:自动机械变速器(AMT)离合器是现代汽车中重要的传动装置,其控制方法和性能对车辆性能和驾驶体验有着关键的影响。本文通过研究AMT离合器的控制方法及相关试验,旨在提高AMT离合器的换挡质量和换挡平顺性,以满足驾驶员的需求和提升驾驶体验。一、引言AMT离合器是发动机和变速器之间的重要传动部件,其工作原理直接影响到汽车的性能和燃油经济性。因此,了解AMT离合器的控制方法和性能是提高车辆性能的关键。二、AMT离合器控制方法1.传统离合器控制方

AMT离合器控制方法与试验研究的综述报告.docx
AMT离合器控制方法与试验研究的综述报告AMT离合器控制方法与试验研究的综述报告自动手动变速器(AMT)是一种自动化的变速器,它将手动操作与电子控制相结合,具有减少驾驶者疲劳度、提高驾驶舒适性和降低燃料消耗等优点。AMT系统是由多个辅助部件组成的,其中离合器是控制动力输出和换档的关键部件。因此,AMT离合器的控制方法和试验研究至关重要。一、AMT离合器的控制方法AMT离合器的控制方法主要有三种:开环控制、基于模型的闭环控制和基于经验的闭环控制。1.开环控制开环控制采用预设的控制策略来控制AMT离合器的操作

AMT车辆起步过程离合器接合控制方法.docx
AMT车辆起步过程离合器接合控制方法标题:AMT车辆起步过程离合器接合控制方法摘要:AMT(AutomatedManualTransmission)车辆起步过程离合器接合控制方法是现代汽车技术领域的研究热点之一。离合器的正确接合对于车辆起步的平稳性、燃油经济性和传动系统寿命都有重要影响。本文从AMT车辆起步过程离合器接合控制方法的优化角度出发,介绍了现有的控制方法,并分析了其存在的问题。针对这些问题,本文提出了一种新的离合器接合控制方法,并通过模拟实验验证了该方法的有效性。1.引言AMT是一种集手动变速器

AMT离合器控制方法与试验研究的任务书.docx
AMT离合器控制方法与试验研究的任务书任务书任务名称:AMT离合器控制方法与试验研究任务时间:XX年XX月-XX年XX月任务参与者:-任务负责人:-任务成员:任务概述:本任务旨在研究AMT离合器的控制方法和试验,主要内容包括:1.基于模型的离合器控制方法研究:利用现有的AMT离合器模型,建立控制模型,研究离合器的控制方法,优化控制策略,提高离合器的控制性能。2.根据研究结果,设计AMT离合器控制算法并在实验中进行验证:基于上述控制模型,设计适用于AMT离合器的控制算法,并通过实验验证算法的有效性和稳定性。