
一种大角度悬空结构电弧增材制造路径规划方法.pdf

觅松****哥哥


1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种大角度悬空结构电弧增材制造路径规划方法.pdf
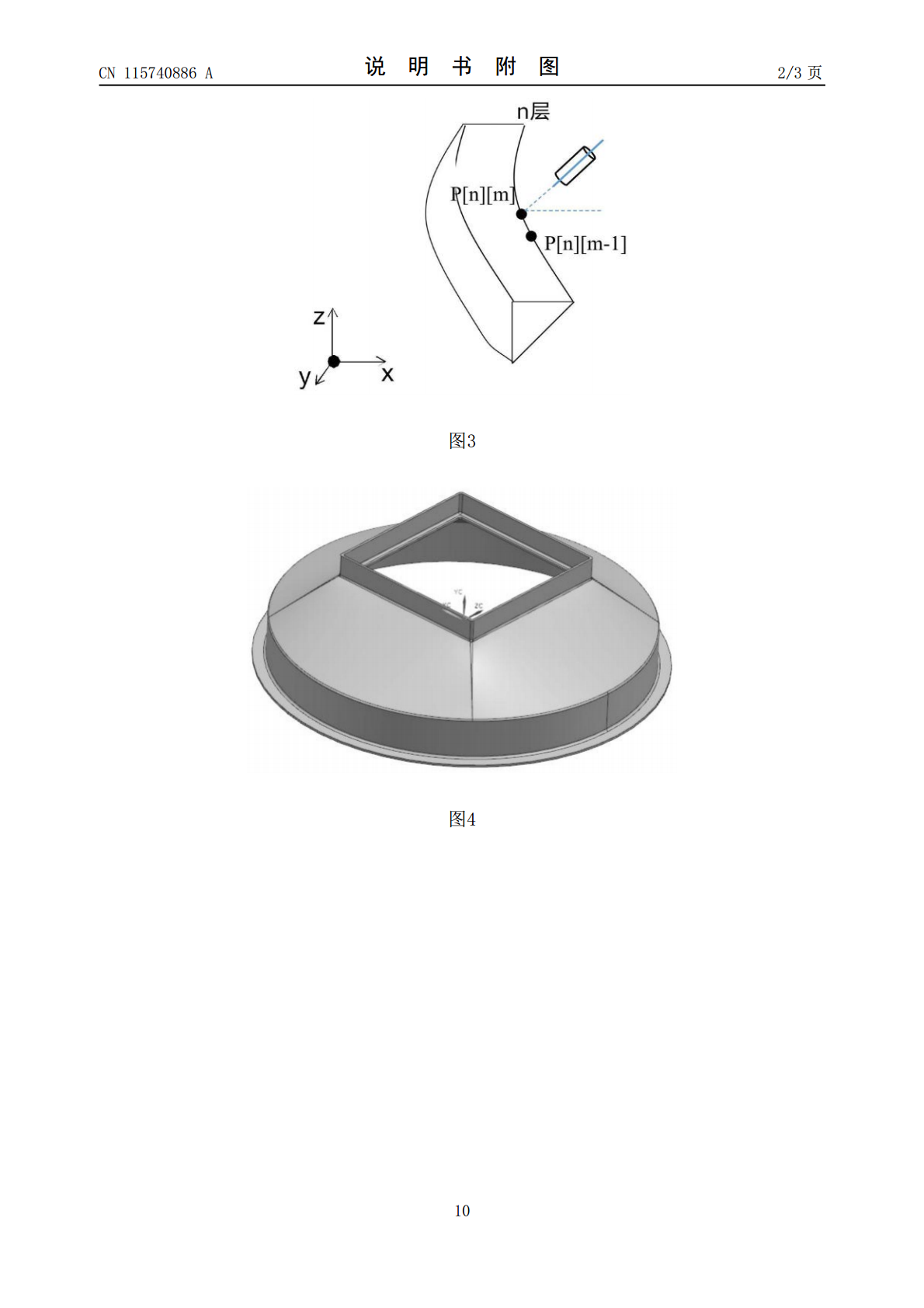
本申请公开了一种大角度悬空结构电弧增材制造路径规划方法,涉及电弧增材制造领域,包括建立悬空结构件的工件坐标系,竖直向上的方向为Z轴,悬空结构件与Z轴正向之间的角度为30°‑90°,对低熔点的悬空结构件的待增材区域,采用平面分层切片方法进行分层切片,并生成三坐标(x,y,z)成形路径;每一层的分层切片,均沿着成形路径进行成形,直到每一层分层切片成形至悬空部位时,沉积头相对于竖直方向倾转30°‑60°,并沿着悬空结构的生长方向指向待成形悬空结构端面。能够对低熔点的大角度悬空结构进行精确成形。

电弧增材再制造工艺与路径规划研究.docx
电弧增材再制造工艺与路径规划研究电弧增材再制造工艺与路径规划研究摘要:随着现代制造业的发展,电弧增材再制造工艺成为一种重要的制造技术。本论文重点研究了电弧增材再制造工艺在制造业中的应用,并探讨了路径规划在电弧增材再制造过程中的重要性和优化方法。通过实验和数值模拟,论文提出了一种有效的路径规划算法,并分析了其优点和应用场景。研究结果表明,电弧增材再制造工艺与路径规划相结合能够提高制造效率和质量,具有广阔的应用前景。关键词:电弧增材再制造;路径规划;制造技术;效率;质量1.引言随着全球制造业的发展,各类金属材

电弧增材制造路径工艺规划的研究现状与发展.docx
电弧增材制造路径工艺规划的研究现状与发展电弧增材制造(ArcAdditiveManufacturing,AAM),是一种基于电弧加热的金属增材制造技术,通过控制电弧熔融金属材料并逐层堆积,实现所需零件的制造。该技术具有高效、灵活、精度高等优点,已经广泛应用于制造业,并在近年来取得了快速发展。目前,电弧增材制造路径工艺规划研究的主要内容包括工艺参数优化、路径规划和材料性能研究等方面。首先,工艺参数的优化是实现高质量零件制造的关键。研究者通过探索不同电弧参数对材料熔融、沉积和固化的影响,优化工艺参数,提高制造

一种提高电弧增材结构件内部质量的路径规划方法.pdf
本发明提供了一种提高电弧增材结构件内部质量的路径规划方法,包括:提取待加工零件截面形状,根据截面形状得到截面路径,并将截面路径按照开放路径、闭合路径和交叉点路径进行分类;分类后,对不同类别的路径分别进行路径规划,将起弧点和收弧点设计在零件本体的外部,在零件外设计出起弧路径和收弧路径,该起弧路径和收弧路径作为加工余量,在后续加工中去除;将所有路径组合,完成起弧和收弧点设置在零件外的路径规划。该路径规划方法将起弧、收弧点设置在零件外的起弧、收弧路径内,并通过后续加工去除,避免了将起弧、收弧点留在零件内造成缺陷

悬空特征结构件电弧增材制造成形及算法优化.docx
悬空特征结构件电弧增材制造成形及算法优化悬空特征结构件电弧增材制造成形及算法优化摘要:悬空特征结构件的制造一直以来都是制造业中的一项难题。本文研究了悬空特征结构件的电弧增材制造成形及算法优化。首先,介绍了悬空特征结构件的定义和特点。然后,分析了电弧增材制造的工艺过程。接着,提出了一种基于遗传算法的优化方法,用于改进悬空特征结构件的制造过程。最后,通过实验验证了本文方法的有效性。1.引言悬空特征结构件是指在制造过程中存在大面积空隙或壁厚较薄的结构件,如蜂窝结构、多孔结构等。由于其特殊的结构形式,传统的制造方