
一种焊枪摆角机构、焊枪机构及焊接机器人.pdf

书生****瑞梦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种焊枪摆角机构、焊枪机构及焊接机器人.pdf
本发明涉及一种焊枪摆角机构、焊枪机构及焊接机器人,包括支撑件,支撑件包括呈L型分布的第一支撑板和第二支撑板,第一支撑板设有第一驱动件,第一驱动件的输出轴与第一支撑板垂直,第一驱动件与第一弧形件的底端连接,第一弧形件的顶端与第二弧形件的顶端转动连接,第二弧形件的底端用于与焊枪转动连接,第二支撑板设有第二驱动件,第二驱动件的输出轴与第二支撑板垂直,第二驱动件与第三弧形件的一端固定,第三弧形件的另一端用于与焊枪转动连接,第三弧形件和第二弧形件用于与焊接连接的端部轴线相互垂直,本发明的摆角机构灵活度好,满足鱼鳞焊

一种焊接机器人的焊枪机构.pdf
本发明公开了一种焊接机器人的焊枪机构,包括焊枪本体,所述焊枪本体包括焊头、第一长柄和第二长柄,所述焊头固定连接在第一长柄的一侧,所述第二长柄位于第一长柄的一侧,所述第一长柄和第二长柄的顶部和底部均滑动连接有限定板,所述第二长柄的一侧开设有滑动槽,所述滑动槽的底部内壁上固定安装有抱闸电机,所述抱闸电机的输出轴的外侧固定套设有第一齿轮,所述抱闸电机的输出轴的顶部和滑动槽的顶部内壁转动连接。本发明结构简单,在抱闸电机的驱动下,可以使旋转轴进行转动,而旋转轴和旋转槽螺纹连接,进而可以调节焊枪本体的长度,使得焊枪本
一种焊枪装夹机构和焊接装置.pdf
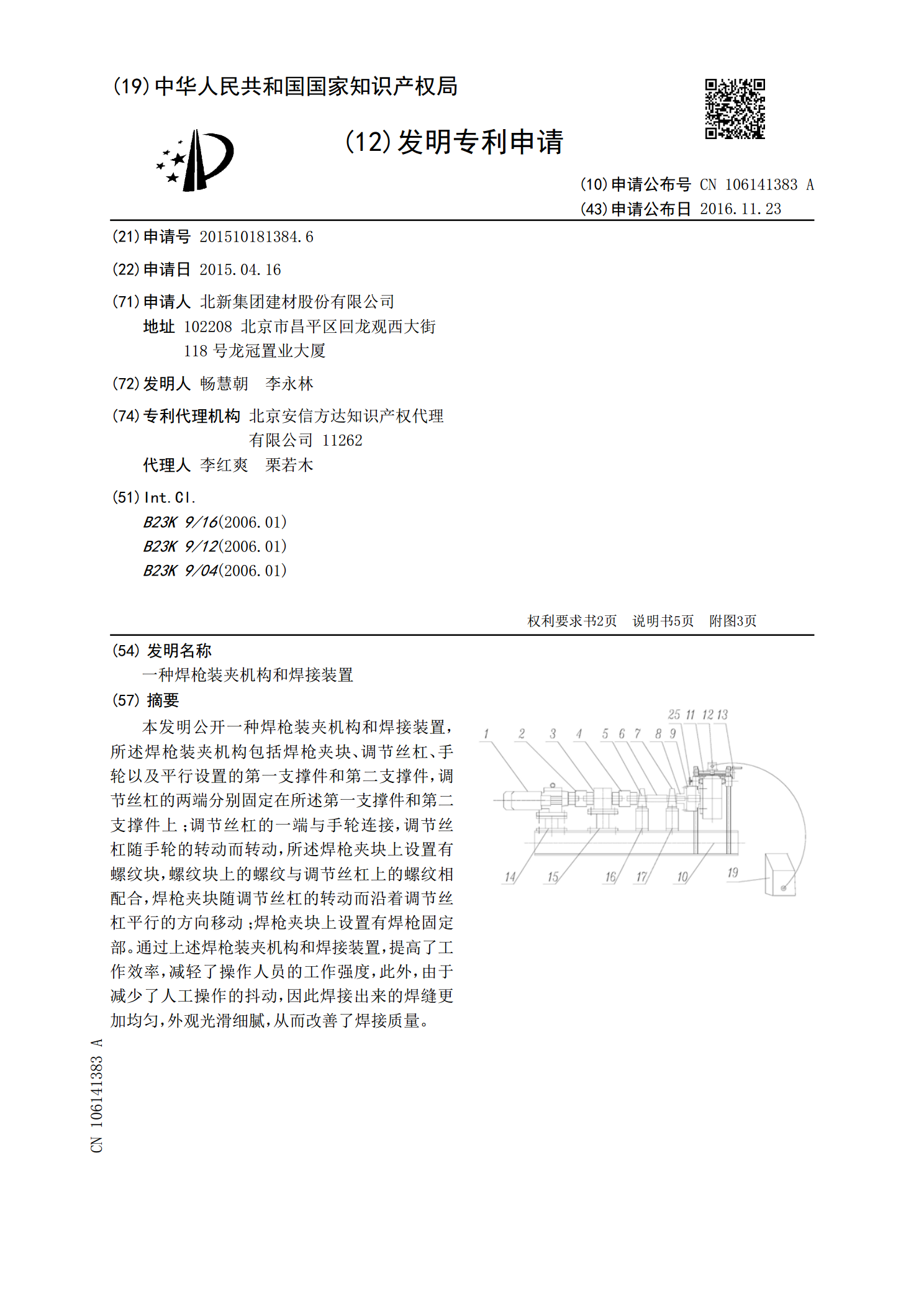
本发明公开一种焊枪装夹机构和焊接装置,所述焊枪装夹机构包括焊枪夹块、调节丝杠、手轮以及平行设置的第一支撑件和第二支撑件,调节丝杠的两端分别固定在所述第一支撑件和第二支撑件上;调节丝杠的一端与手轮连接,调节丝杠随手轮的转动而转动,所述焊枪夹块上设置有螺纹块,螺纹块上的螺纹与调节丝杠上的螺纹相配合,焊枪夹块随调节丝杠的转动而沿着调节丝杠平行的方向移动;焊枪夹块上设置有焊枪固定部。通过上述焊枪装夹机构和焊接装置,提高了工作效率,减轻了操作人员的工作强度,此外,由于减少了人工操作的抖动,因此焊接出来的焊缝更加均匀
可用于深孔焊接的焊枪夹持机构.pdf
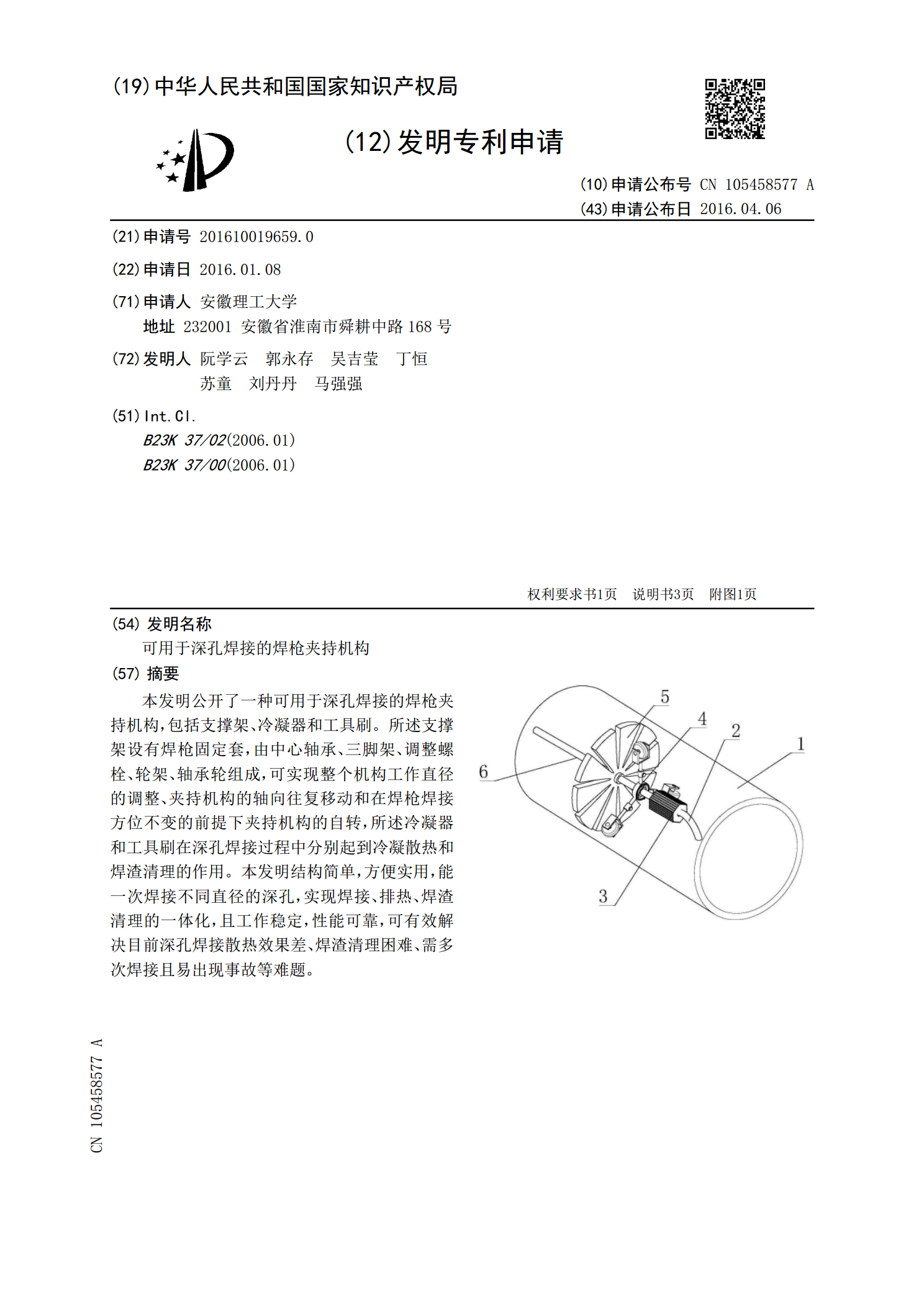
本发明公开了一种可用于深孔焊接的焊枪夹持机构,包括支撑架、冷凝器和工具刷。所述支撑架设有焊枪固定套,由中心轴承、三脚架、调整螺栓、轮架、轴承轮组成,可实现整个机构工作直径的调整、夹持机构的轴向往复移动和在焊枪焊接方位不变的前提下夹持机构的自转,所述冷凝器和工具刷在深孔焊接过程中分别起到冷凝散热和焊渣清理的作用。本发明结构简单,方便实用,能一次焊接不同直径的深孔,实现焊接、排热、焊渣清理的一体化,且工作稳定,性能可靠,可有效解决目前深孔焊接散热效果差、焊渣清理困难、需多次焊接且易出现事故等难题。

一种小孔径管材焊接焊枪摆动机构.pdf
本发明提供一种小孔径管材焊接焊枪摆动机构,涉及焊枪摆动技术领域,该一种小孔径管材焊接焊枪摆动机构包括内炉体,包括基座,其特征在于,所述基台上经滑移部滑动连接有滑台,所述滑台上设有焊臂,所述焊臂经调节部活动连接有焊枪,所述基座上设有用于驱动滑台完成轴向摆枪动作的第一驱动部,所述滑台上设有用于驱动焊臂完成径向摆枪动作的第二驱动部,所述滑台上还设有用于调节焊臂伸出长度的第三驱动部。