
用于智慧工地的智能塔吊作业全景监控还原方法和系统.pdf

思洁****爱吗


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于智慧工地的智能塔吊作业全景监控还原方法和系统.pdf
本申请实施例提供一种用于智慧工地的智能塔吊作业全景监控还原方法和系统。该方法包括:每个摄像头以预设时间间隔循环遍历采集其所在区域的预设数量个方向的多张图像,并记录每幅图像的拍摄时刻;在单轮预设数量个方向均已拍摄完毕时,对于单个摄像头,根据摄像头的预设数量方向的多张图像进行全景拼接得到全景图像并存储;绘制塔吊作业现场地图,并标记所有摄像头在地图上的位置;接收点击地图显示界面上的目标摄像头的监控调取请求信息,显示相应的目标摄像头的全景图像。本申请现场全景图像采集方式使得远在施工现场之外的监控人员能够分区域调取
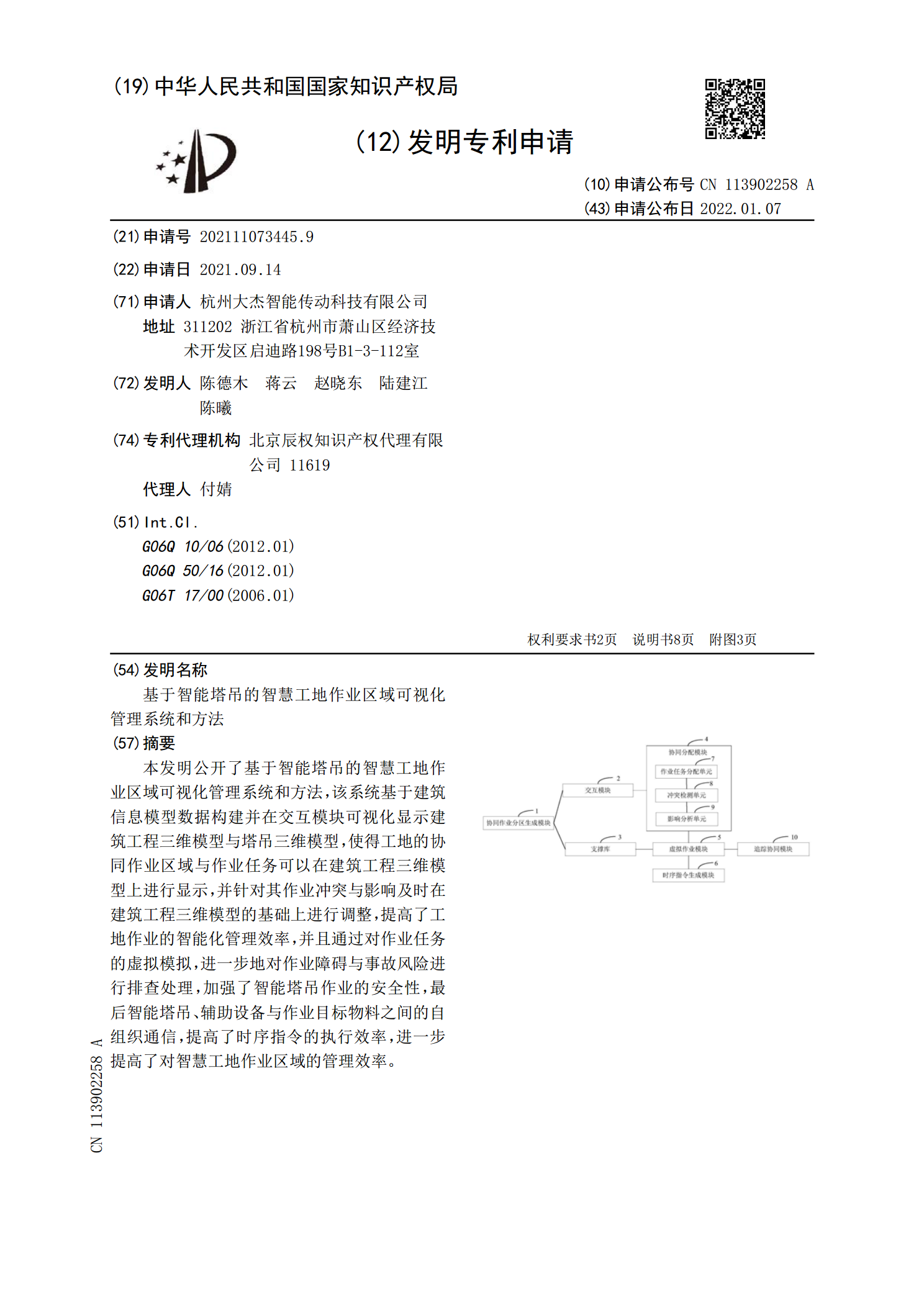
基于智能塔吊的智慧工地作业区域可视化管理系统和方法.pdf
本发明公开了基于智能塔吊的智慧工地作业区域可视化管理系统和方法,该系统基于建筑信息模型数据构建并在交互模块可视化显示建筑工程三维模型与塔吊三维模型,使得工地的协同作业区域与作业任务可以在建筑工程三维模型上进行显示,并针对其作业冲突与影响及时在建筑工程三维模型的基础上进行调整,提高了工地作业的智能化管理效率,并且通过对作业任务的虚拟模拟,进一步地对作业障碍与事故风险进行排查处理,加强了智能塔吊作业的安全性,最后智能塔吊、辅助设备与作业目标物料之间的自组织通信,提高了时序指令的执行效率,进一步提高了对智慧工地

一种智慧工地的智能监控方法及系统.pdf
本发明公开了一种智慧工地的智能监控方法及系统,涉及智能监控相关领域,所述方法包括:基于数据采集装置采集目标监控工地的基础施工信息并进行功能分析,输出功能特征;以所述功能特征为聚类特征进行同功能区域聚类,输出监控区域聚类结果匹配对应的监测指标集,通过静态监控设备输出静态监测数据集;根据所述动态监控设备,获取动态监测数据集;将所述静态监测数据集和所述动态监测数据集输入异常监测模型中,输出异常监测结果;根据所述异常监测结果,输出监测预警信息。解决了现有技术监控数据源单一,造成预警响应周期较长,数据交互性差的技术
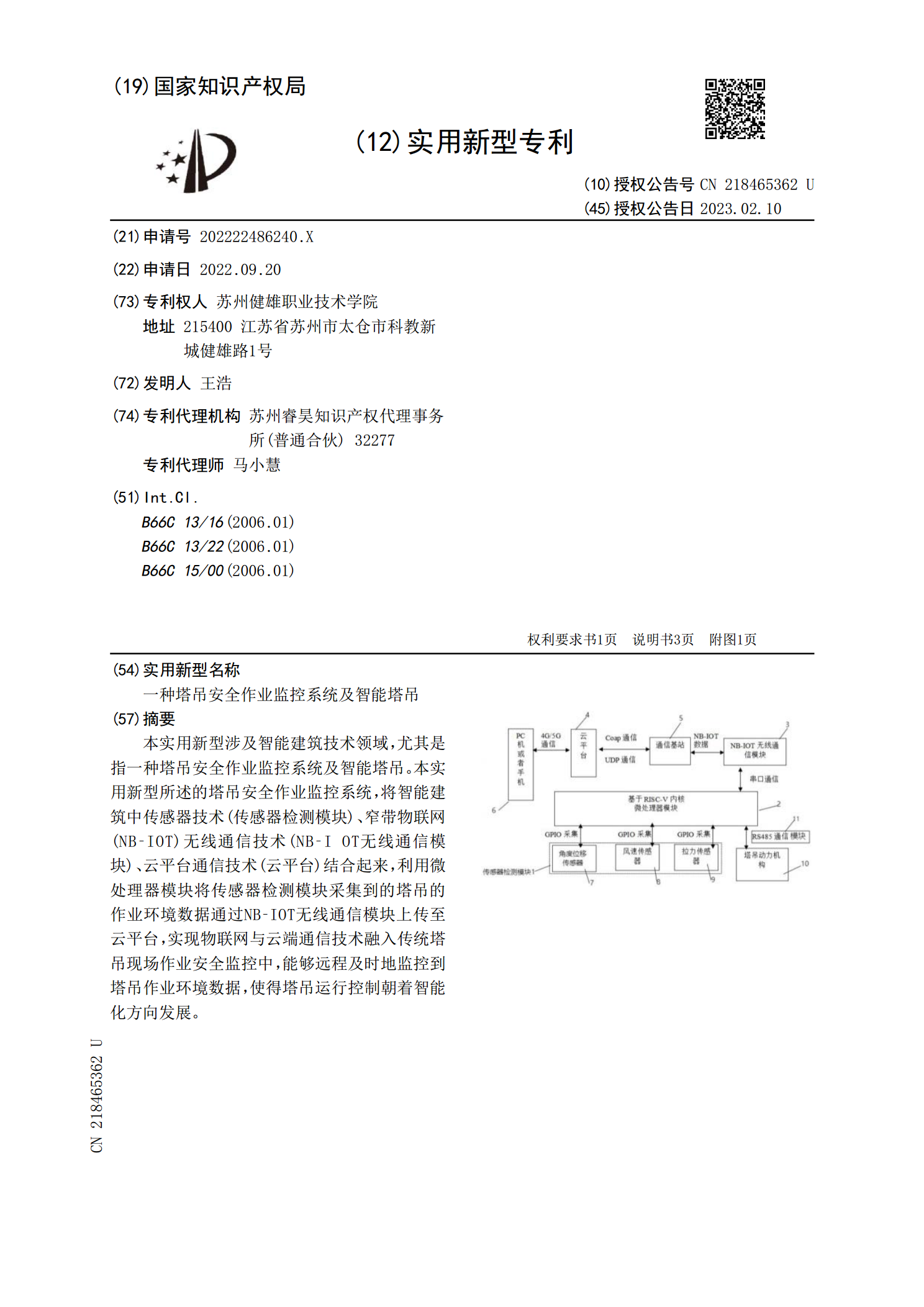
一种塔吊安全作业监控系统及智能塔吊.pdf
本实用新型涉及智能建筑技术领域,尤其是指一种塔吊安全作业监控系统及智能塔吊。本实用新型所述的塔吊安全作业监控系统,将智能建筑中传感器技术(传感器检测模块)、窄带物联网(NB?IOT)无线通信技术(NB?IOT无线通信模块)、云平台通信技术(云平台)结合起来,利用微处理器模块将传感器检测模块采集到的塔吊的作业环境数据通过NB?IOT无线通信模块上传至云平台,实现物联网与云端通信技术融入传统塔吊现场作业安全监控中,能够远程及时地监控到塔吊作业环境数据,使得塔吊运行控制朝着智能化方向发展。
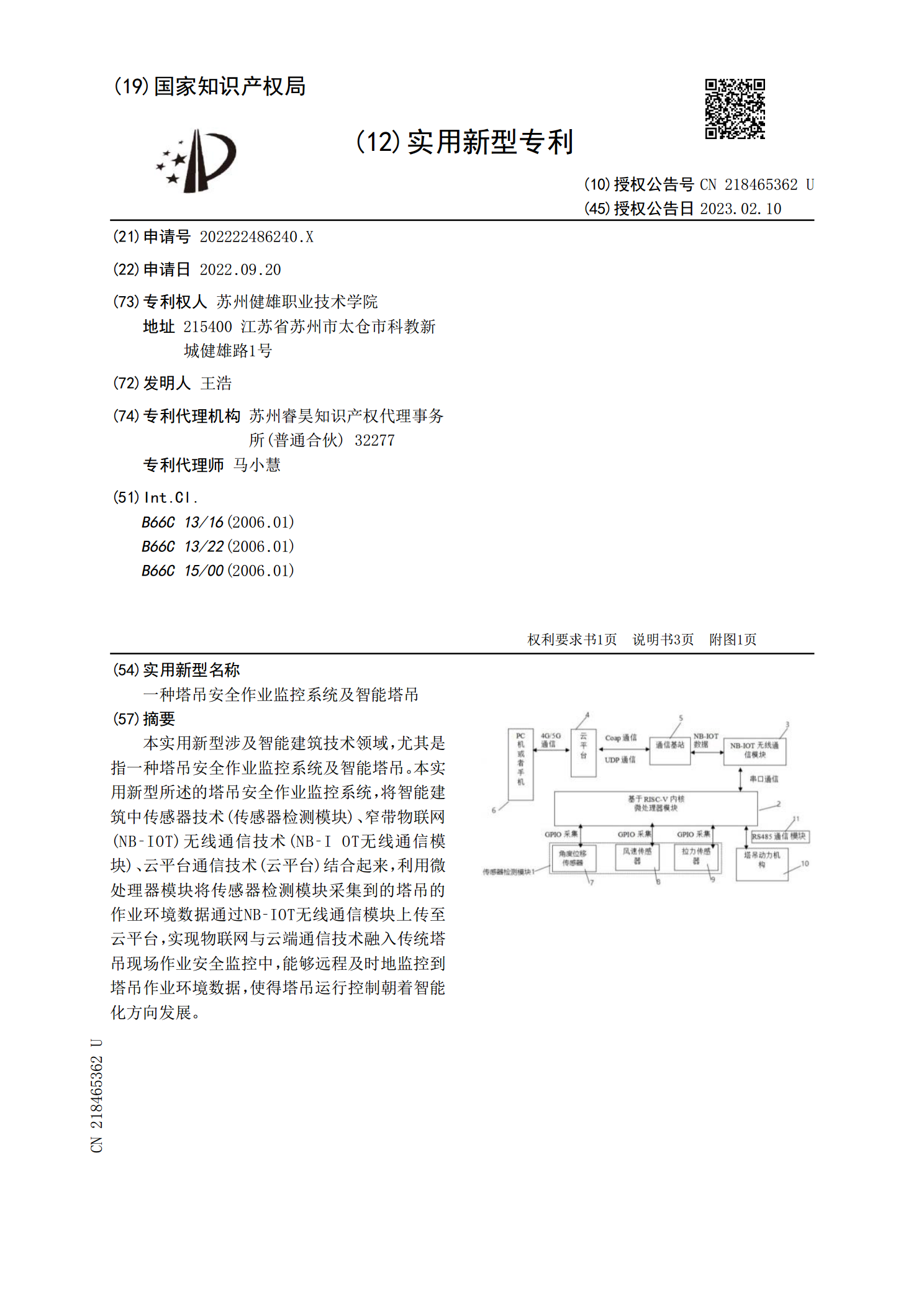
一种塔吊安全作业监控系统及智能塔吊.pdf
本实用新型涉及智能建筑技术领域,尤其是指一种塔吊安全作业监控系统及智能塔吊。本实用新型所述的塔吊安全作业监控系统,将智能建筑中传感器技术(传感器检测模块)、窄带物联网(NB?IOT)无线通信技术(NB?IOT无线通信模块)、云平台通信技术(云平台)结合起来,利用微处理器模块将传感器检测模块采集到的塔吊的作业环境数据通过NB?IOT无线通信模块上传至云平台,实现物联网与云端通信技术融入传统塔吊现场作业安全监控中,能够远程及时地监控到塔吊作业环境数据,使得塔吊运行控制朝着智能化方向发展。