
绕射波成像方法及装置.pdf

Ch****49

1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
绕射波成像方法及装置.pdf
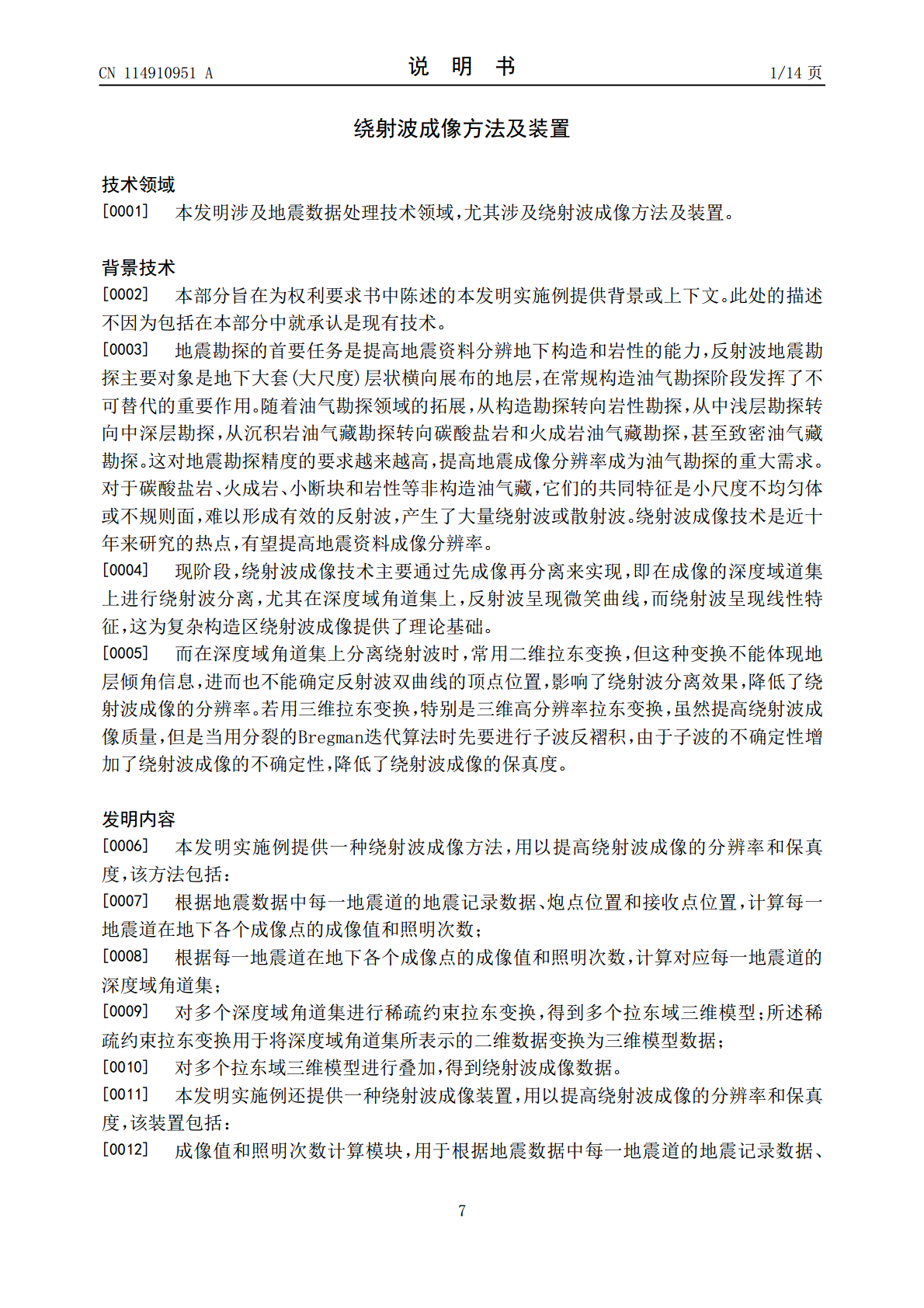
本发明公开了一种绕射波成像方法及装置,其中该方法包括:根据地震数据中每一地震道的地震记录数据、炮点位置和接收点位置,计算每一地震道在地下各个成像点的成像值和照明次数;根据每一地震道在地下各个成像点的成像值和照明次数,计算对应每一地震道的深度域角道集;对多个深度域角道集进行稀疏约束拉东变换,得到多个拉东域三维模型;所述稀疏约束拉东变换用于将深度域角道集所表示的二维数据变换为三维模型数据;对多个拉东域三维模型进行叠加,得到绕射波成像数据。本发明可以提升绕射波成像的分辨率和保真度。

绕射波成像方法、装置和电子设备.pdf
本发明提供了一种绕射波成像方法、装置和电子设备,涉及地质勘探的技术领域,包括:获取待成像区域的倾角道集;基于倾角道集确定目标成像点的振幅数据集;结合预设双阶权函数和目标成像点的振幅数据集确定目标成像点的绕射波成像结果;基于待成像区域内所有成像点的绕射波成像结果确定待成像区域的综合绕射波成像结果。本发明方法中,绕射波振幅对应的预设双阶权函数值大于第一预设阈值,反射波振幅对应的预设双阶权函数值小于第二预设阈值,且第一预设阈值大于第二预设阈值,因此该方法能够有效的压制反射波能量,使得绕射波成像更为聚焦,从而实现

倾角域逆时偏移绕射波成像方法.docx
倾角域逆时偏移绕射波成像方法标题:倾角域逆时偏移绕射波成像方法摘要:逆时偏移(RTM)是一种有效的地下勘探成像方法,适用于复杂地质情况下的成像。然而,传统的RTM方法在处理包含绕射波的复杂地质情况时存在局限性。倾角域逆时偏移绕射波成像方法是一种通过将倾角域处理引入RTM方法来解决这一问题的创新方法。本论文将介绍倾角域逆时偏移绕射波成像方法的原理、流程和应用。1.引言地下成像是勘探和地质研究中至关重要的工具。逆时偏移是一种通过逆向地震波传播路径的方法来重建地下介质模型的成像方法。然而,在处理包含绕射波的复杂

基于行波分解的绕射波成像方法研究.docx
基于行波分解的绕射波成像方法研究基于行波分解的绕射波成像方法研究摘要:绕射波成像是一种非常重要的地球物理探测方法,它具有成像分辨率高、成本低等优点。然而,传统的绕射波成像方法在处理复杂地质结构的情况下存在一定的局限性。本文基于行波分解的思想,提出了一种新的绕射波成像方法,通过对波场进行行波分解,可以更好地处理复杂地质结构,提高成像效果。引言:随着地球资源的快速消耗,对地下结构的探测与研究变得越来越重要。而绕射波成像方法由于其成像分辨率高、成本低等优点而备受关注。然而,传统的绕射波成像方法在处理复杂地质结构

地震绕射波成像的任务书.docx
地震绕射波成像的任务书任务名称:地震绕射波成像任务目的:利用地震绕射波成像技术对地下介质进行探测及成像,揭示地下构造及物质信息。任务背景:地震勘探一直是油气勘探领域中一项重要的技术。传统的地震勘探技术主要是针对地下反射波的探测,忽略了地震绕射波对地层的探测。地震绕射波是指地震波在地层界面上发生绕射现象后所形成的波。由于地震绕射波的传播路径与反射波不同,因此能够探测到反射波无法达到的区域,对地下介质的探测能力高于反射法。任务内容:1.研究地震绕射波的传播特点以及成像原理,包括波形分析、走时分析等方面。2.选