
一种运载火箭姿态控制系统仿真方法及其系统.pdf

书生****22

1/10

2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种运载火箭姿态控制系统仿真方法及其系统.pdf
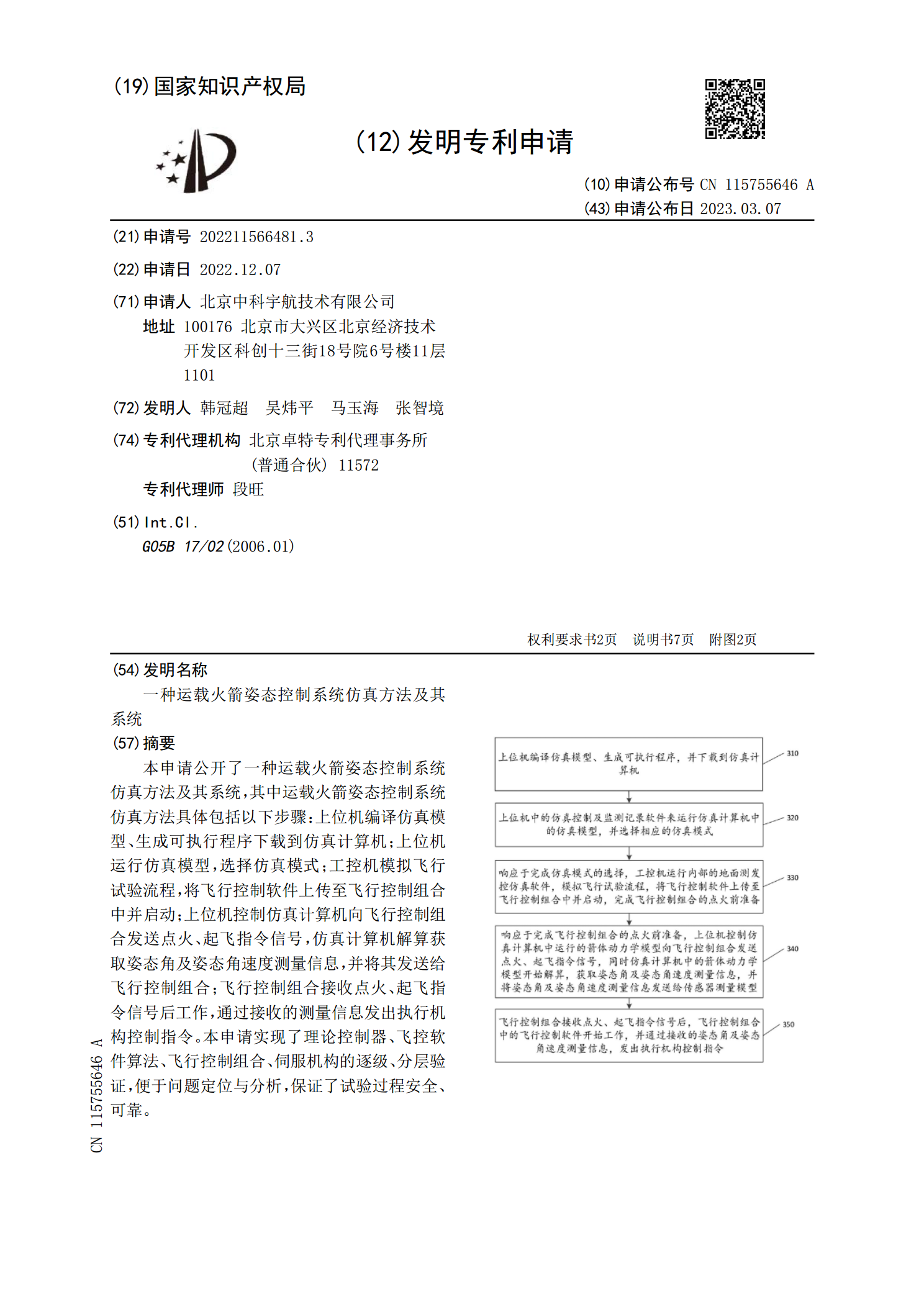
本申请公开了一种运载火箭姿态控制系统仿真方法及其系统,其中运载火箭姿态控制系统仿真方法具体包括以下步骤:上位机编译仿真模型、生成可执行程序下载到仿真计算机;上位机运行仿真模型,选择仿真模式;工控机模拟飞行试验流程,将飞行控制软件上传至飞行控制组合中并启动;上位机控制仿真计算机向飞行控制组合发送点火、起飞指令信号,仿真计算机解算获取姿态角及姿态角速度测量信息,并将其发送给飞行控制组合;飞行控制组合接收点火、起飞指令信号后工作,通过接收的测量信息发出执行机构控制指令。本申请实现了理论控制器、飞控软件算法、飞行

捆绑型运载火箭姿态控制系统半实物仿真方法.docx
捆绑型运载火箭姿态控制系统半实物仿真方法摘要:本文针对捆绑型运载火箭的姿态控制系统进行研究,提出了一种半实物仿真方法。捆绑型运载火箭作为重要的航天器,对姿态控制的精度和稳定性具有较高要求。本文首先对捆绑型运载火箭的姿态控制系统进行了介绍,包括其组成和工作原理。然后,借助半实物仿真方法,对该系统进行了建模和仿真。最后,通过对仿真结果的分析和对比,验证了该方法的有效性。关键词:捆绑型运载火箭;姿态控制系统;半实物仿真1.引言捆绑型运载火箭作为一类重要的航天器,负责将卫星等载荷送入预定轨道。姿态控制系统作为其核

一种用于运载火箭的仿真试验系统及方法.pdf
本发明公开了一种用于运载火箭的仿真试验系统及方法,该系统包括:模拟测发控系统、火箭运动仿真系统以及中心计算机,中心计算机分别与模拟测发控系统以及火箭运动仿真系统连接;火箭运动仿真系统用于对运载火箭的控制系统进行六自由度仿真,生成初始火箭运动与姿态信息;模拟测发控系统用于将待装订参数发送给中心计算机,以对运载火箭进行飞行初始化参数装订;中心计算机用于基于装订后的参数进行导航制导控制计算,并向火箭运动仿真系统发送控制指令;火箭运动仿真系统还用于基于控制指令对运载火箭的控制系统进行六自由度仿真,得到新的火箭运动

火箭姿态控制系统数字仿真分析.docx
火箭姿态控制系统数字仿真分析标题:火箭姿态控制系统数字仿真分析摘要:火箭姿态控制系统是保证火箭在航天任务中稳定飞行的关键装置之一。通过数字仿真分析火箭姿态控制系统可以有效地预测系统的性能,并进行优化设计。本文通过概述火箭姿态控制系统的基本原理和数字仿真方法,详细分析火箭姿态控制系统的仿真模型与参数建立,并展示了仿真结果。通过数字仿真分析,可以提供理论依据和技术支持,为火箭姿态控制系统的设计与优化提供参考。第一节引言1.1研究背景1.2研究目的第二节火箭姿态控制系统基本原理2.1火箭姿态控制系统的定义2.2

一种多阶冗余系留气球姿态控制系统及其协同控制方法.pdf
本发明公开了一种多阶冗余系留气球姿态控制系统及其协同控制方法。控制系统从实现逻辑上划分为三个逻辑层:系统层、链路层和处理层。系统层将地面控制子系统的指控计算机和显控台,球上控制分机的球控计算机进行双冗余,且采用系统控制权处理方法。链路层将指控计算机、球控计算机、每个执行器之间的通信设备进行双冗余,且采用数据交换方法。处理层将球控计算机的处理器、执行器的处理器进行双冗余,且采用处理器仲裁决策方法。每个逻辑层的设计具备相对独立的功能划分和任务划分,同时针对每个逻辑层提供相对独立的控制,一方面降低不同逻辑层上设