
激光末制导炮弹研制用的半实物仿真系统.pdf

森林****io

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光末制导炮弹研制用的半实物仿真系统.pdf
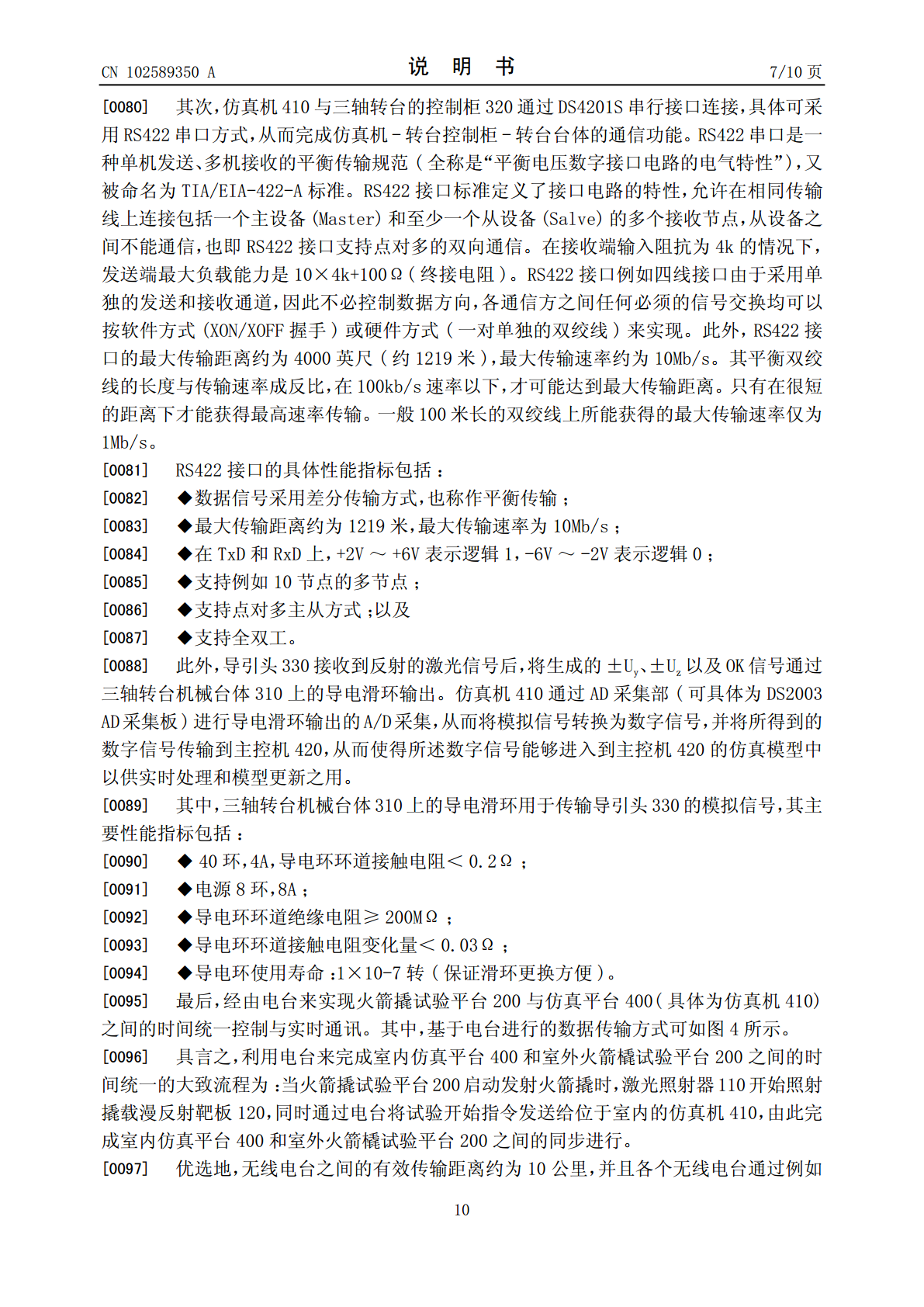
一种激光末制导炮弹研制用室内外半实物仿真系统,包括:火箭橇试验平台,发射装载有靶标的火箭橇,并实时测量火箭橇的速度和位置信息;目标模拟装置,利用激光照射靶标,以使得激光末制导炮弹的导引头能够通过接收来自靶标的激光进行目标跟踪;姿态模拟装置,包括能够装载导引头的三轴转台,用于模拟弹体的姿态运动;以及仿真平台,根据预定的仿真数学模型对火箭橇速度和位置信息以及导引头生成信号进行分析处理,以得到与弹体姿态变化及弹目相对运动有关的信息并相应控制三轴转台的转动。其中,火箭橇试验平台位于室外,并且火箭橇试验平台与仿真平

迫击炮弹末制导控制系统仿真研究的开题报告.docx
迫击炮弹末制导控制系统仿真研究的开题报告一、选题背景迫击炮作为一种重要的火炮武器,广泛应用于战争中的防御和攻击任务中。而对于迫击炮的弹药,其精确度和杀伤力就成为了迫切需要解决的问题。针对这一问题,制导控制系统的出现为弹药的命中精度提供了有效的解决方案。但是,迫击炮弹药的轻便性和成本考虑,不太适合搭载高成本、复杂的制导控制系统。因此,基于末制导技术的控制系统成为了当前研究的热点。针对以上情况,本文将着眼于迫击炮弹药的末制导控制系统,探究制导控制系统对弹药精准度的影响,结合仿真技术进行相关研究。二、研究内容本

迫击炮弹末制导控制系统仿真研究的中期报告.docx
迫击炮弹末制导控制系统仿真研究的中期报告尊敬的领导:本次中期报告将从研究背景、研究内容、研究方法与步骤、进展情况和下一步工作等几个方面进行分析和总结。一、研究背景随着现代战争的发展,各种武器装备的技术水平不断提高。迫击炮作为一种具有弧线射击能力的火炮,其精度是影响其实际使用效果的关键因素。传统迫击炮弹由于精度较低,难以有效地命中目标。因此,需要研究迫击炮弹末制导控制系统,提高其精度和打击能力,以满足现代战争的要求。二、研究内容本次研究的内容主要包括以下几个方面:1.对迫击炮弹末制导控制系统原理进行深入研究

GPSINS系统航空制导炸弹半实物仿真系统研究.docx
GPSINS系统航空制导炸弹半实物仿真系统研究GPSINS系统航空制导炸弹是一种高精度的制导炸弹,其成功地将GPS技术和INS技术进行了有机结合,实现了精确制导和攻击。本文将从GPSINS系统的工作原理、半实物仿真系统的构建、系统的优点以及未来发展趋势四个方面详细论述GPSINS系统航空制导炸弹半实物仿真系统的研究。一、GPSINS系统的工作原理GPSINS系统的工作原理是基于GPS技术和INS技术相结合的,其中GPS为核心部分,将INS技术进行校正。使用GPS的卫星定位来提供当前位置,速度和时间信息,并

迫击炮弹末制导控制系统仿真研究的任务书.docx
迫击炮弹末制导控制系统仿真研究的任务书任务书一、任务背景迫击炮作为一种常规武器装备,在现代战争中仍然发挥着重要的作用。迫击炮弹可以从隐蔽位置快速射出,使其在目标周围制造威慑和毁伤力,对战场的胜利具有重要的影响。但由于其弹道的不稳定性和航迹的难以预测,使得迫击炮的打击效果受到了很大限制。迫击炮末制导控制系统是一种新型技术,可以通过计算机数据的处理和反馈,在一定程度上改善迫击炮的制导系统,提高其打击精度,增强其战场作用。二、任务目标本次任务旨在对迫击炮弹末制导控制系统进行仿真研究,分析和评估系统的性能和可行性