
基于5G信号异步时钟误差补偿的多无人机协同定位方法.pdf

Th****84


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于5G信号异步时钟误差补偿的多无人机协同定位方法.pdf
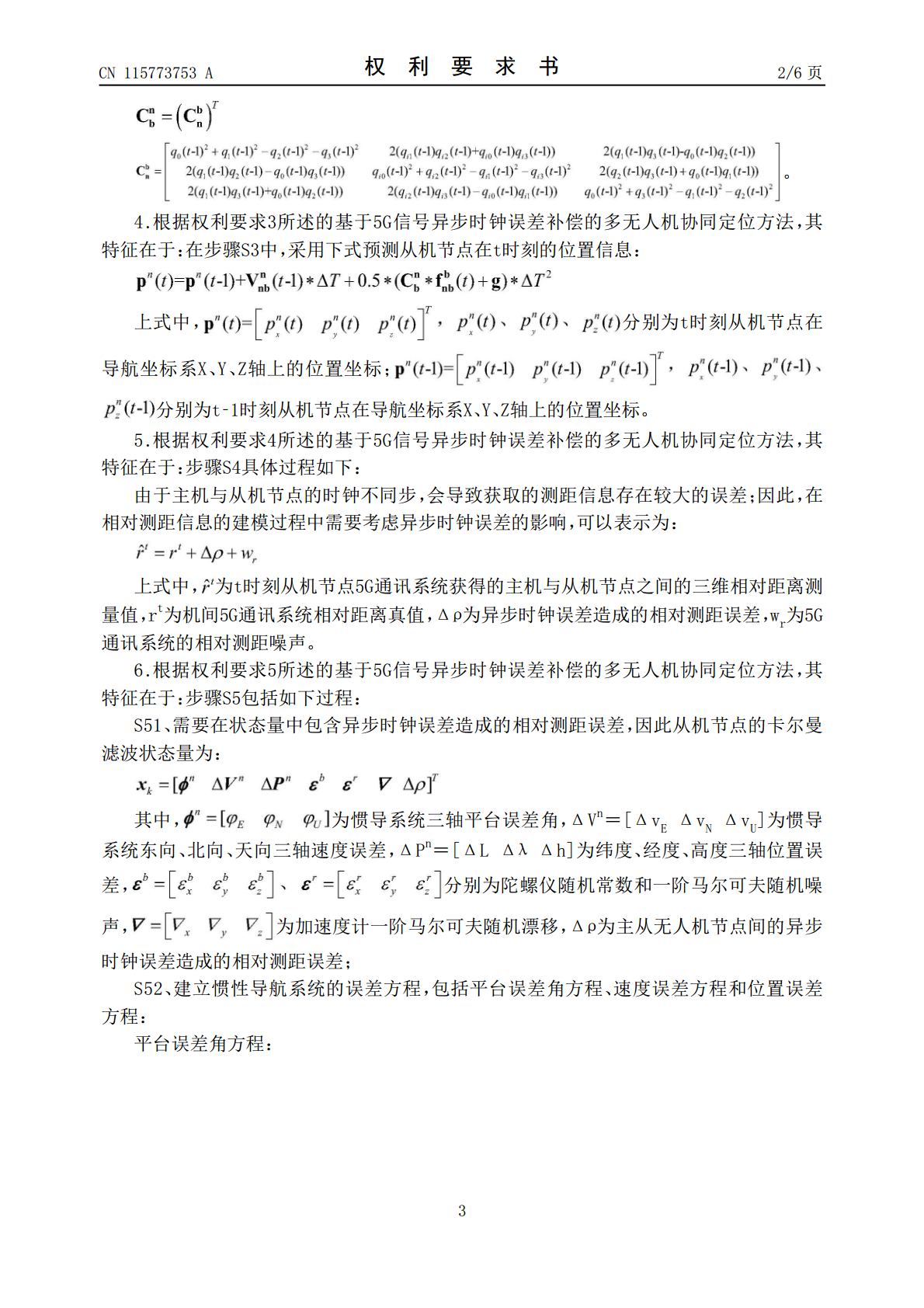
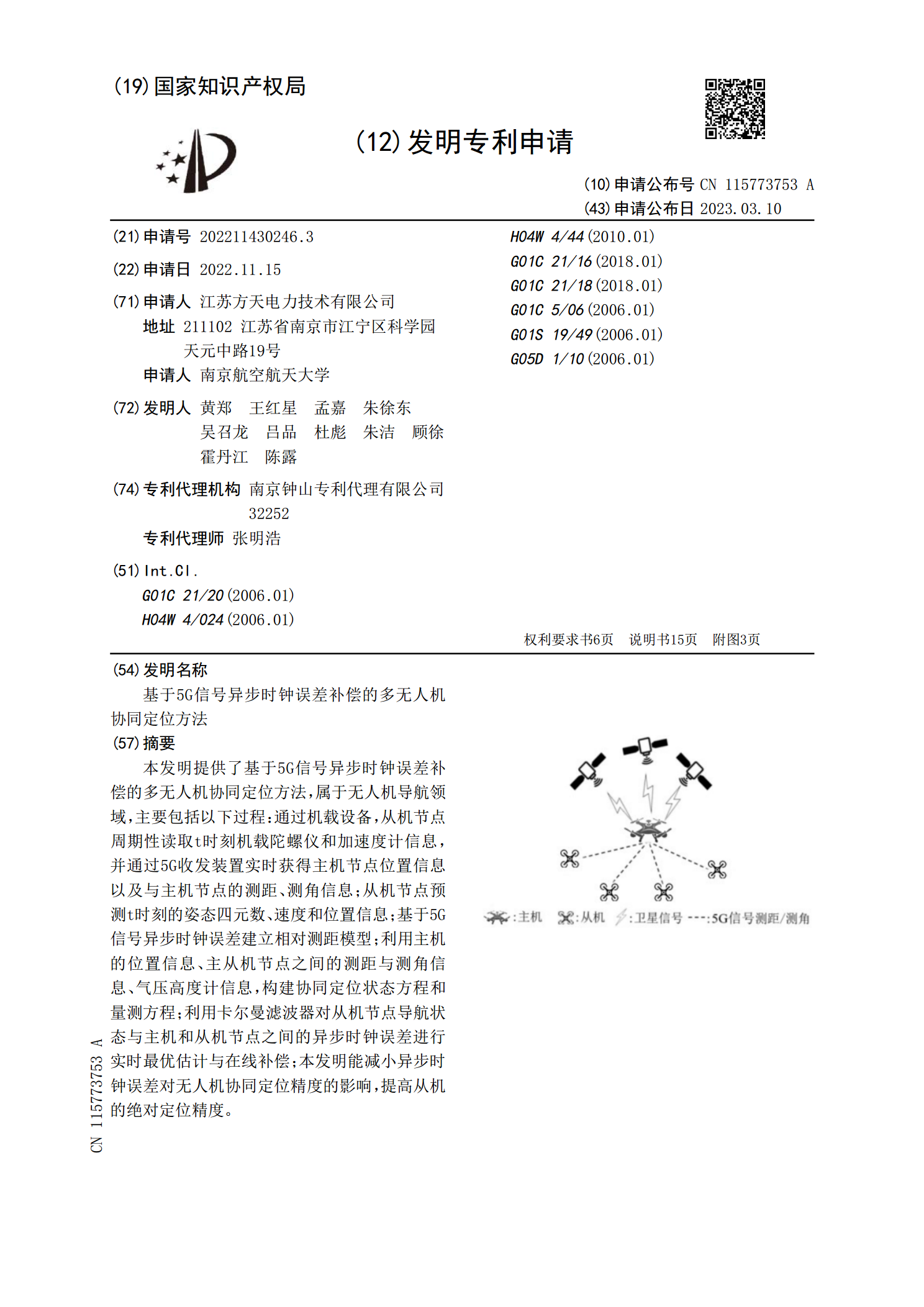
本发明提供了基于5G信号异步时钟误差补偿的多无人机协同定位方法,属于无人机导航领域,主要包括以下过程:通过机载设备,从机节点周期性读取t时刻机载陀螺仪和加速度计信息,并通过5G收发装置实时获得主机节点位置信息以及与主机节点的测距、测角信息;从机节点预测t时刻的姿态四元数、速度和位置信息;基于5G信号异步时钟误差建立相对测距模型;利用主机的位置信息、主从机节点之间的测距与测角信息、气压高度计信息,构建协同定位状态方程和量测方程;利用卡尔曼滤波器对从机节点导航状态与主机和从机节点之间的异步时钟误差进行实时最优
基于时延补偿的多无人机协同定位方法.pdf
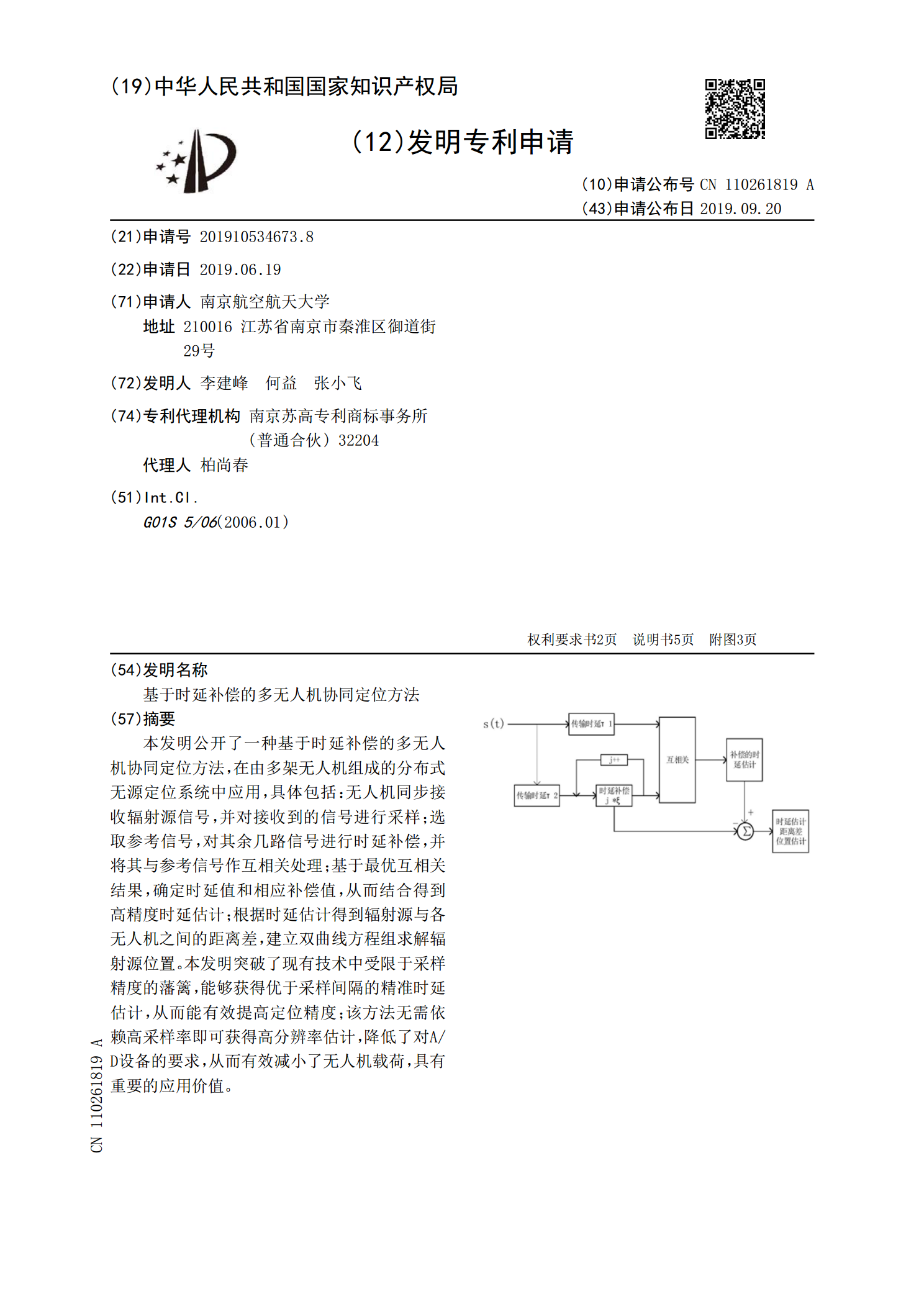
本发明公开了一种基于时延补偿的多无人机协同定位方法,在由多架无人机组成的分布式无源定位系统中应用,具体包括:无人机同步接收辐射源信号,并对接收到的信号进行采样;选取参考信号,对其余几路信号进行时延补偿,并将其与参考信号作互相关处理;基于最优互相关结果,确定时延值和相应补偿值,从而结合得到高精度时延估计;根据时延估计得到辐射源与各无人机之间的距离差,建立双曲线方程组求解辐射源位置。本发明突破了现有技术中受限于采样精度的藩篱,能够获得优于采样间隔的精准时延估计,从而能有效提高定位精度;该方法无需依赖高采样率即
GPS拒止环境下基于定位置信度的多无人机协同定位方法.pptx
汇报人:目录PARTONEPARTTWO无人机协同定位的背景和意义基于定位置信度的协同定位方法原理无人机协同定位的应用场景PARTTHREE定位置信度的概念和计算方法定位置信度在协同定位中的重要性基于定位置信度的协同定位算法流程PARTFOURGPS拒止环境对无人机定位的影响基于定位置信度的协同定位算法在GPS拒止环境下的适用性算法实现的关键技术问题及解决方案PARTFIVE与传统定位方法的比较算法的优势和局限性分析在实际应用中的适用性和限制条件PARTSIX算法的改进方向和未来发展趋势在军事、救援等领域
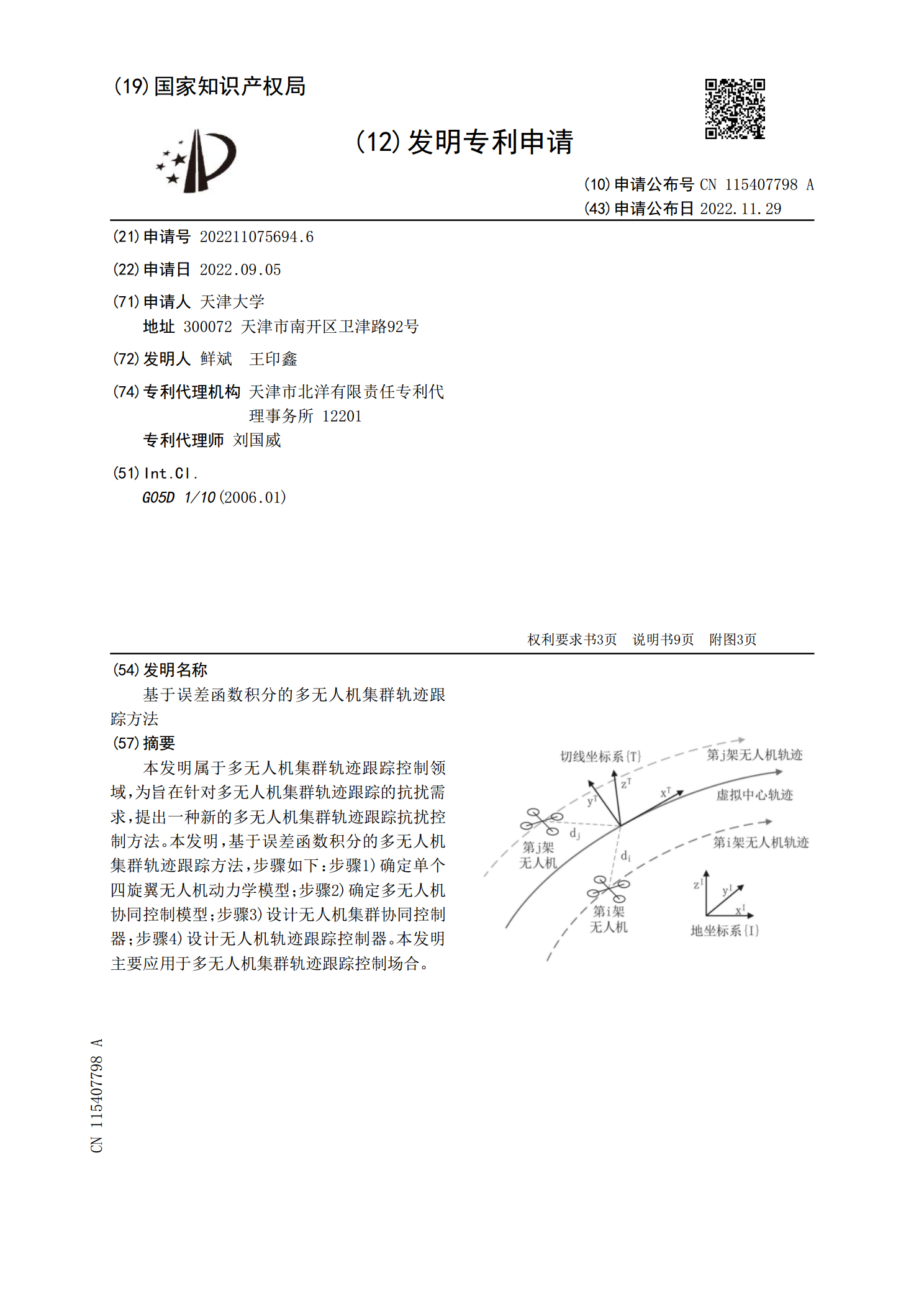
基于误差函数积分的多无人机集群轨迹跟踪方法.pdf
本发明属于多无人机集群轨迹跟踪控制领域,为旨在针对多无人机集群轨迹跟踪的抗扰需求,提出一种新的多无人机集群轨迹跟踪抗扰控制方法。本发明,基于误差函数积分的多无人机集群轨迹跟踪方法,步骤如下:步骤1)确定单个四旋翼无人机动力学模型;步骤2)确定多无人机协同控制模型;步骤3)设计无人机集群协同控制器;步骤4)设计无人机轨迹跟踪控制器。本发明主要应用于多无人机集群轨迹跟踪控制场合。
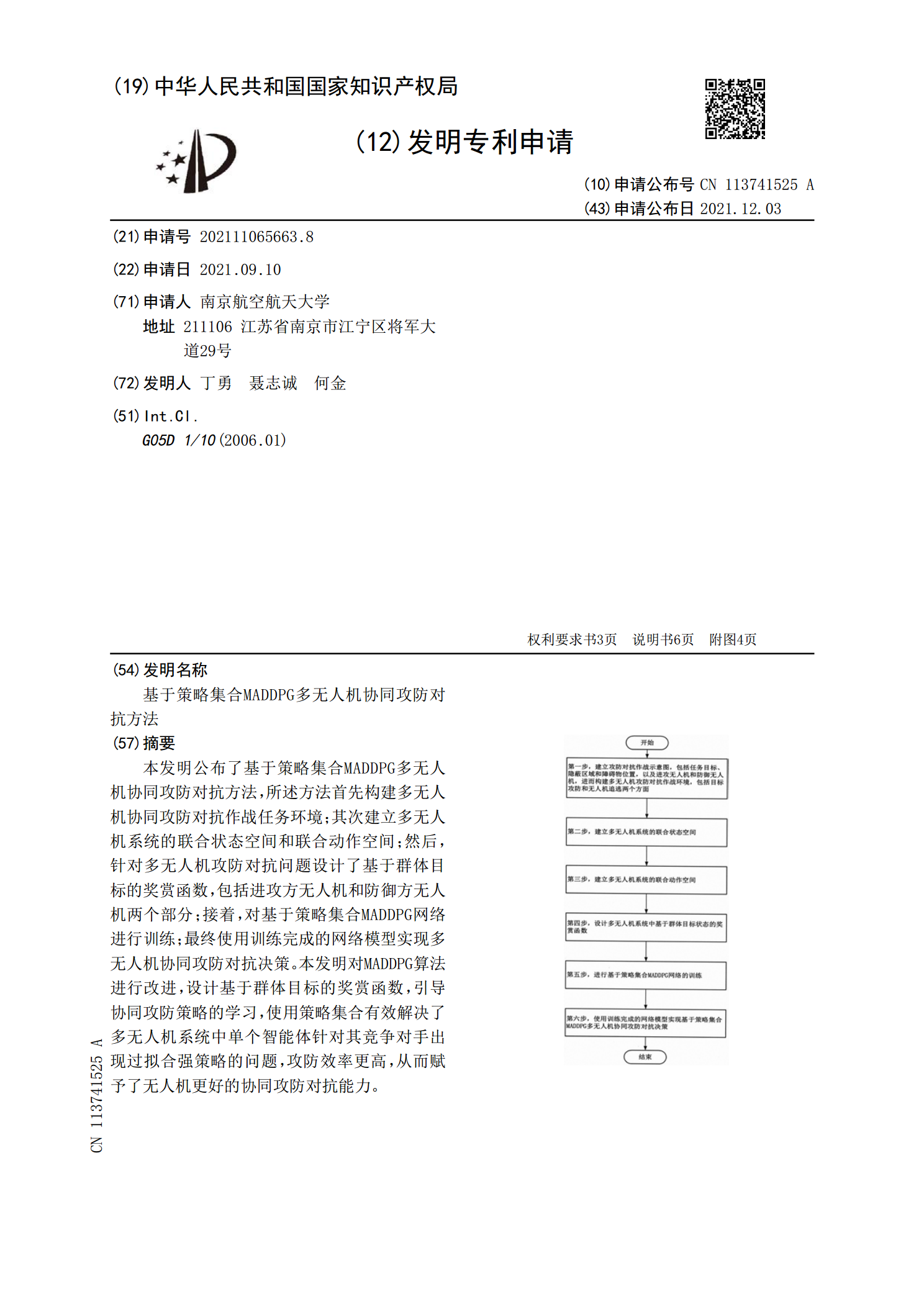
基于策略集合MADDPG多无人机协同攻防对抗方法.pdf
本发明公布了基于策略集合MADDPG多无人机协同攻防对抗方法,所述方法首先构建多无人机协同攻防对抗作战任务环境;其次建立多无人机系统的联合状态空间和联合动作空间;然后,针对多无人机攻防对抗问题设计了基于群体目标的奖赏函数,包括进攻方无人机和防御方无人机两个部分;接着,对基于策略集合MADDPG网络进行训练;最终使用训练完成的网络模型实现多无人机协同攻防对抗决策。本发明对MADDPG算法进行改进,设计基于群体目标的奖赏函数,引导协同攻防策略的学习,使用策略集合有效解决了多无人机系统中单个智能体针对其竞争对手