
升降机控制方法和装置及使用其的升降机装置.pdf

玉军****la

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
升降机控制方法和装置及使用其的升降机装置.pdf
本发明提供升降机控制方法和装置及使用其的升降机装置。根据一个实施例的升降机装置包括:升降机驱动电动机;电动机位置测量单元,其计算电动机的位置值并且将电动机的位置值传送到升降机控制装置;位置存储单元,其存储电动机的位置值;状态反馈位置控制单元,其每第一周期接收来自位置存储单元的电动机的位置值,接收电动机的速度,并且输出转矩控制值以控制电动机;状态估算单元,其每第二周期基于转矩控制值和位置值来估算电动机速度,并且将结果传送到状态反馈位置控制单元;向量控制单元,其基于转矩控制值来产生电流控制值并根据电流控制值和
升降机控制装置以及升降机控制方法.pdf
本发明提供一种能够检测离子迁移等所造成的异常并能够控制升降机的升降机控制装置。升降机控制装置具备:至少一个以上的输入电路,接收来自升降机涉及的安全装置的信号;控制微机,基于从输入电路接收的信号对升降机进行控制;以及设定电路,从控制微机接收示出用于设想从输入电路接收的信号的取入条件的信号,并基于取入条件,向输入电路发送示出将输入电路从安全装置接收的信号输出到控制微机时的输出逻辑的信号,其中,输入电路向控制微机发送将来自安全装置的信号按照输出逻辑进行了输出的信号,控制微机若从输入电路接收到信号,则根据信号与基
方法和升降机装置.pdf
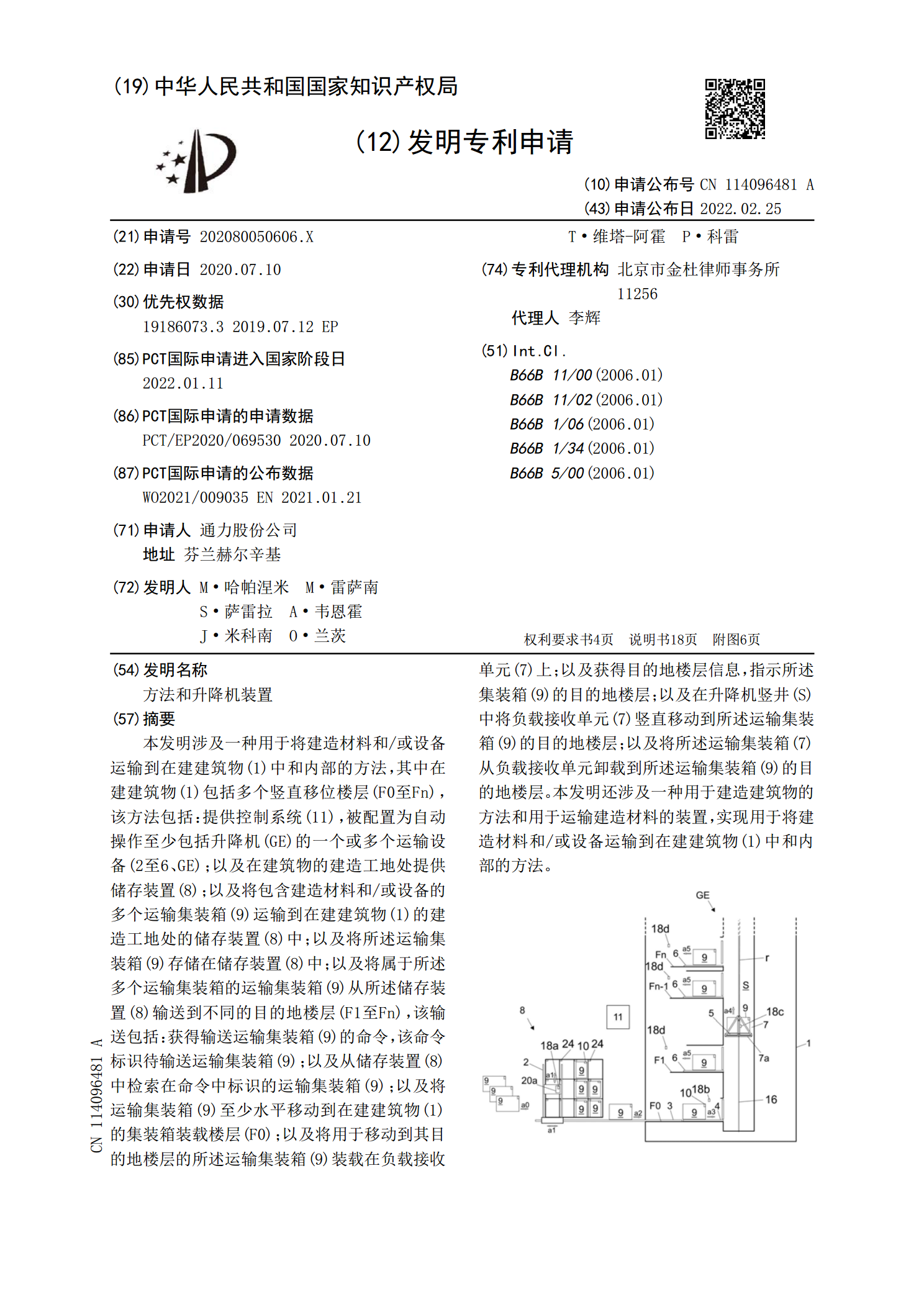
本发明涉及一种用于将建造材料和/或设备运输到在建建筑物(1)中和内部的方法,其中在建建筑物(1)包括多个竖直移位楼层(F0至Fn),该方法包括:提供控制系统(11),被配置为自动操作至少包括升降机(GE)的一个或多个运输设备(2至6、GE);以及在建筑物的建造工地处提供储存装置(8);以及将包含建造材料和/或设备的多个运输集装箱(9)运输到在建建筑物(1)的建造工地处的储存装置(8)中;以及将所述运输集装箱(9)存储在储存装置(8)中;以及将属于所述多个运输集装箱的运输集装箱(9)从所述储存装置(8)输送
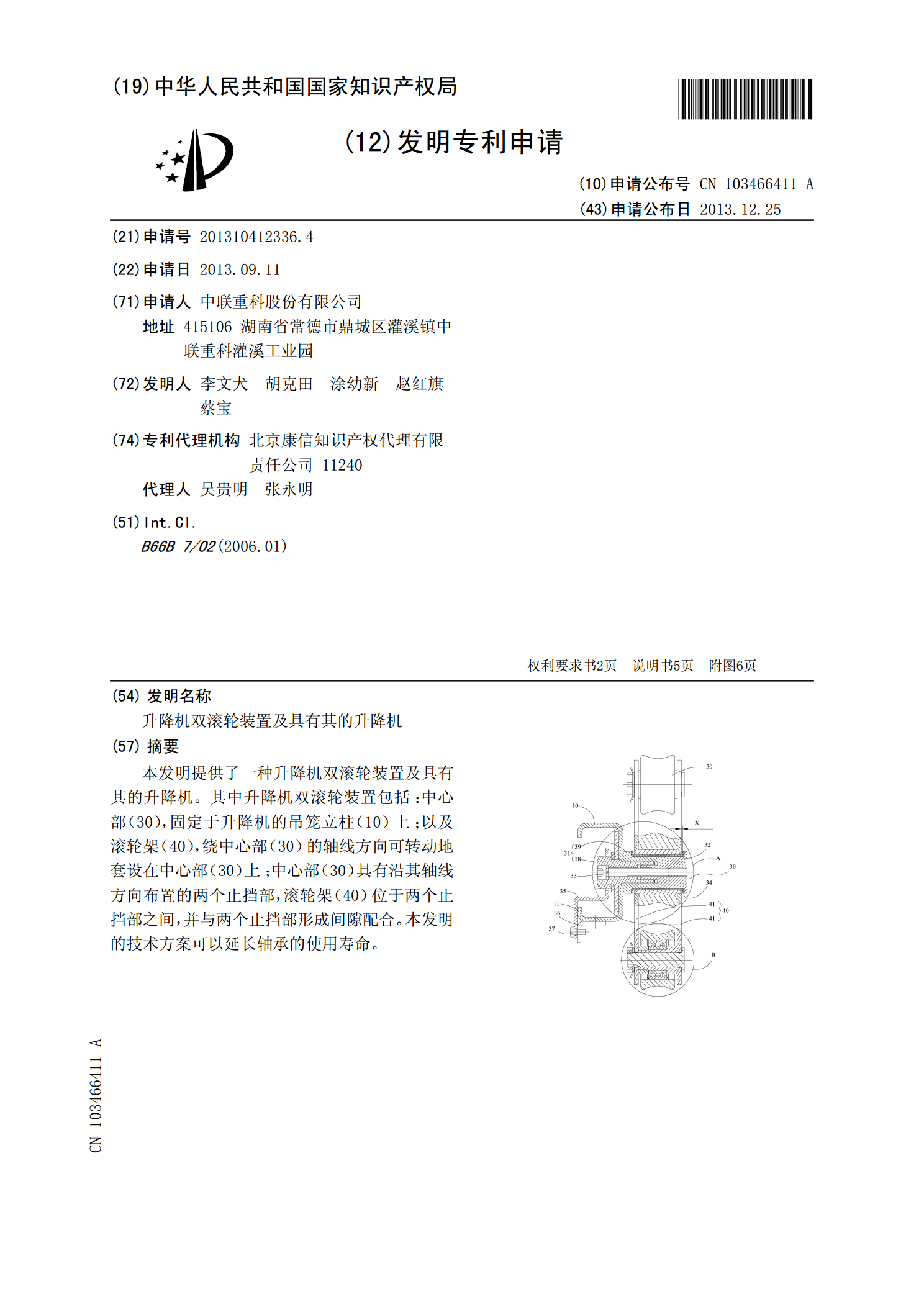
升降机双滚轮装置及具有其的升降机.pdf
本发明提供了一种升降机双滚轮装置及具有其的升降机。其中升降机双滚轮装置包括:中心部(30),固定于升降机的吊笼立柱(10)上;以及滚轮架(40),绕中心部(30)的轴线方向可转动地套设在中心部(30)上;中心部(30)具有沿其轴线方向布置的两个止挡部,滚轮架(40)位于两个止挡部之间,并与两个止挡部形成间隙配合。本发明的技术方案可以延长轴承的使用寿命。
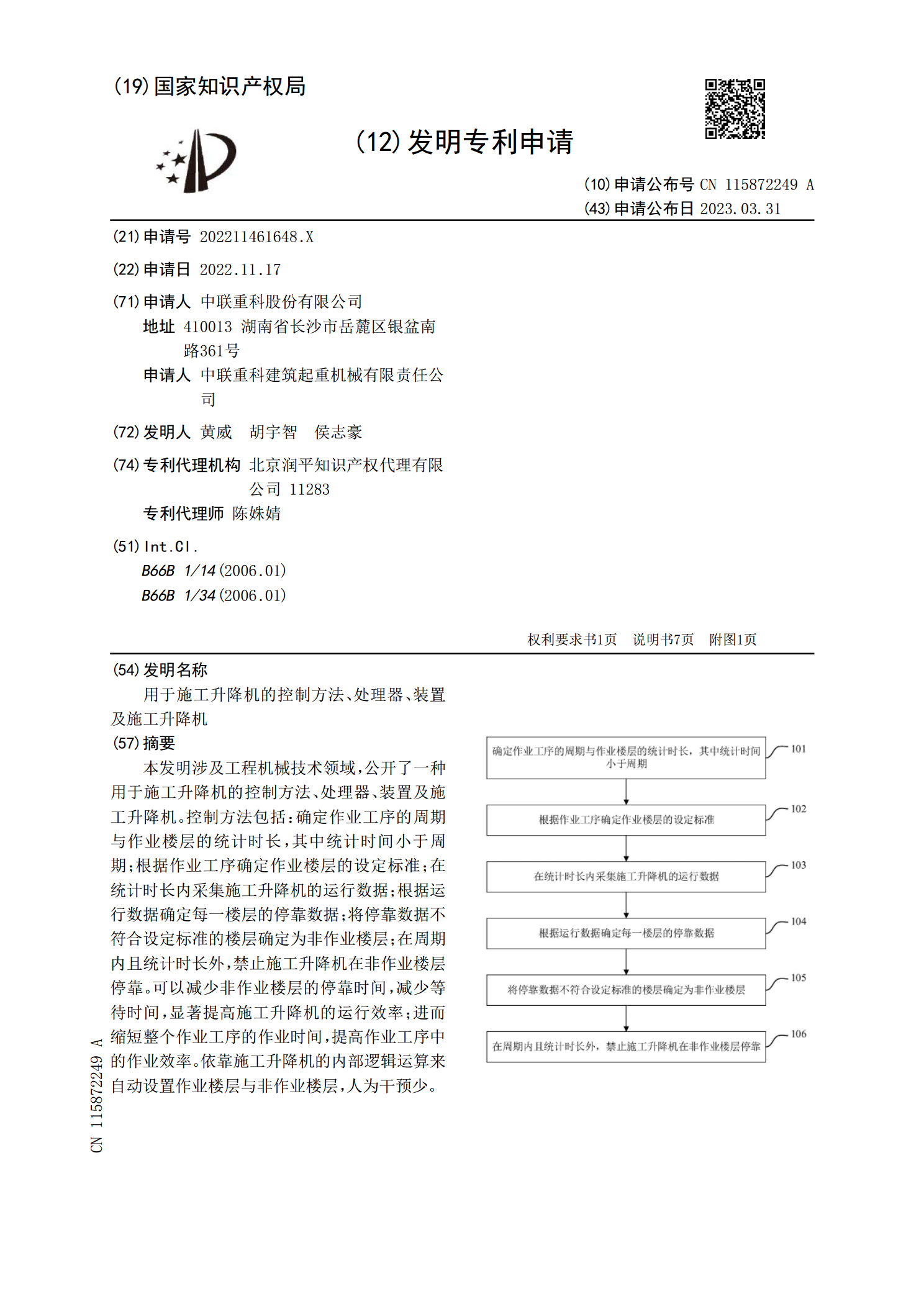
用于施工升降机的控制方法、处理器、装置及施工升降机.pdf
本发明涉及工程机械技术领域,公开了一种用于施工升降机的控制方法、处理器、装置及施工升降机。控制方法包括:确定作业工序的周期与作业楼层的统计时长,其中统计时间小于周期;根据作业工序确定作业楼层的设定标准;在统计时长内采集施工升降机的运行数据;根据运行数据确定每一楼层的停靠数据;将停靠数据不符合设定标准的楼层确定为非作业楼层;在周期内且统计时长外,禁止施工升降机在非作业楼层停靠。可以减少非作业楼层的停靠时间,减少等待时间,显著提高施工升降机的运行效率;进而缩短整个作业工序的作业时间,提高作业工序中的作业效率。