
一种多模型自校准卡尔曼滤波方法.pdf

一条****然后

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多模型自校准卡尔曼滤波方法.pdf
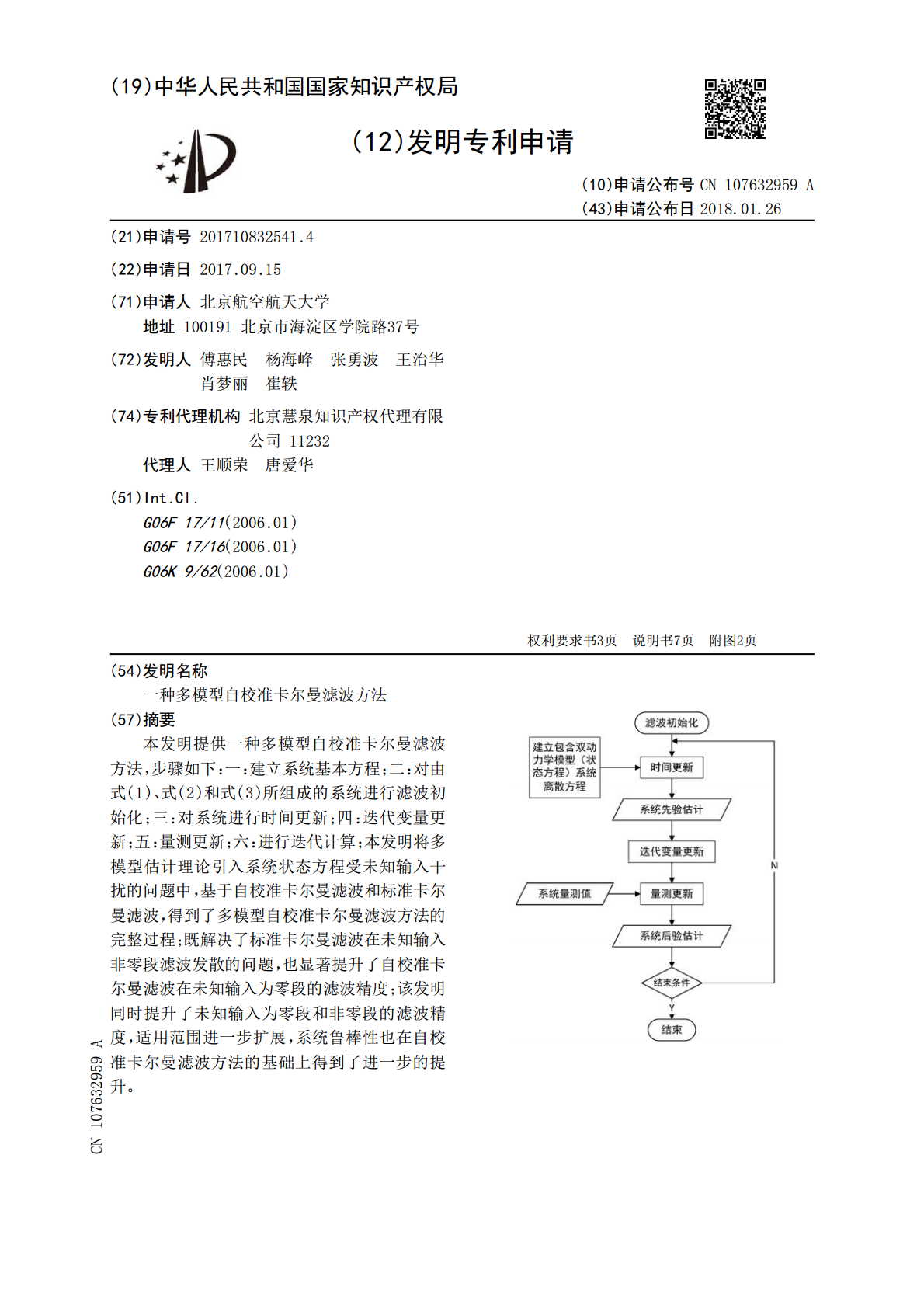
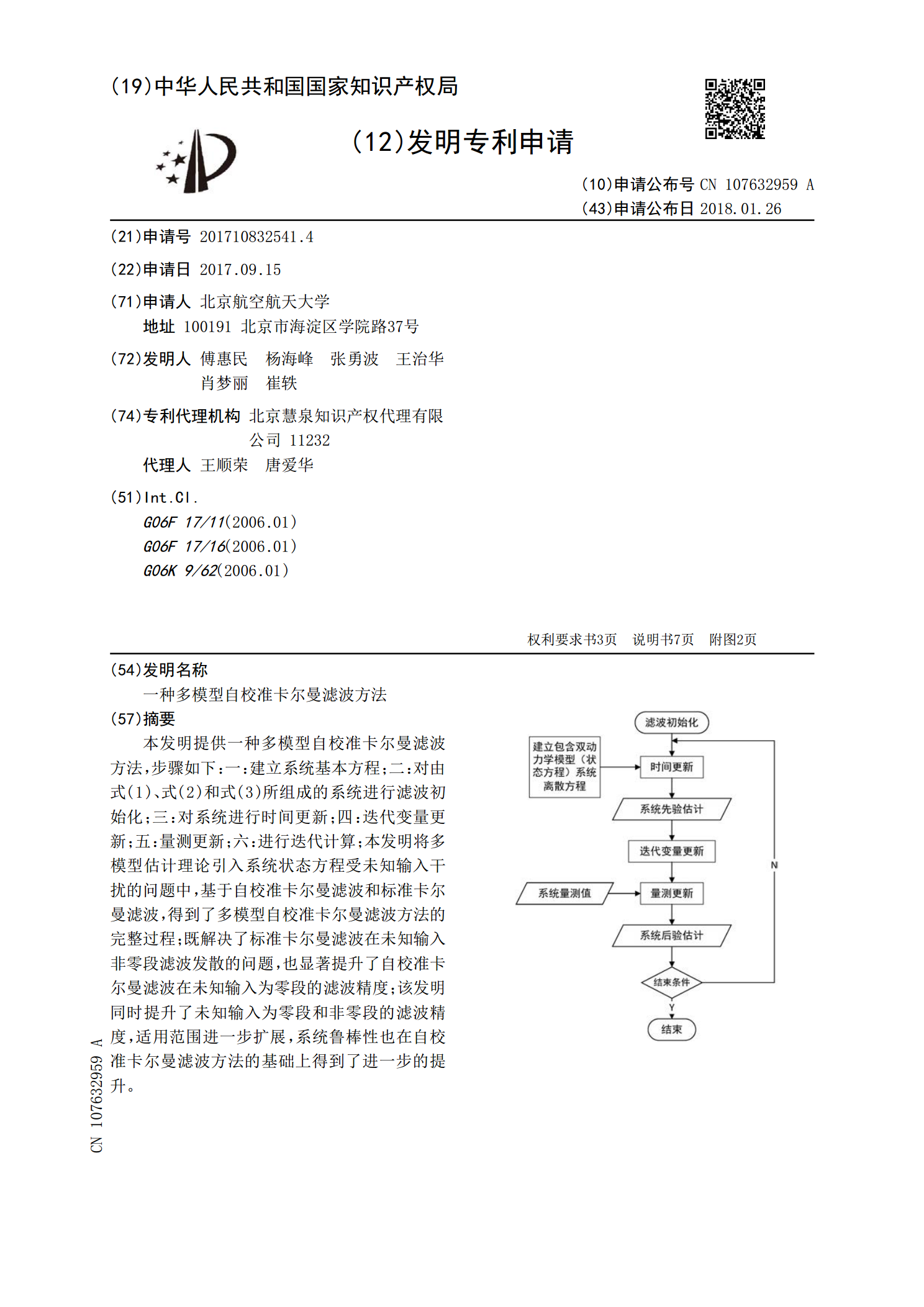
本发明提供一种多模型自校准卡尔曼滤波方法,步骤如下:一:建立系统基本方程;二:对由式(1)、式(2)和式(3)所组成的系统进行滤波初始化;三:对系统进行时间更新;四:迭代变量更新;五:量测更新;六:进行迭代计算;本发明将多模型估计理论引入系统状态方程受未知输入干扰的问题中,基于自校准卡尔曼滤波和标准卡尔曼滤波,得到了多模型自校准卡尔曼滤波方法的完整过程;既解决了标准卡尔曼滤波在未知输入非零段滤波发散的问题,也显著提升了自校准卡尔曼滤波在未知输入为零段的滤波精度;该发明同时提升了未知输入为零段和非零段的滤波

多模型卡尔曼滤波器的研究.docx
多模型卡尔曼滤波器的研究多模型卡尔曼滤波器的研究摘要:卡尔曼滤波器是一种常用的估计滤波算法,用于估计系统状态和滤除噪声。然而,在某些情况下,系统可能存在多种不同的行为模式,传统的单一模型卡尔曼滤波器无法有效地处理这种多样性。因此,本文研究了多模型卡尔曼滤波器,探讨了其原理和应用,以及在实践中的一些问题和挑战。关键词:卡尔曼滤波器、多模型、系统估计、噪声滤波1.引言卡尔曼滤波器是一种用于估计动态系统状态的有效工具。它通过观测数据和系统模型来预测和更新系统状态,并对传感器噪声进行滤除,从而提高估计结果的准确度
基于准模型校准卡尔曼滤波的机器人运动系统辨识方法.pdf
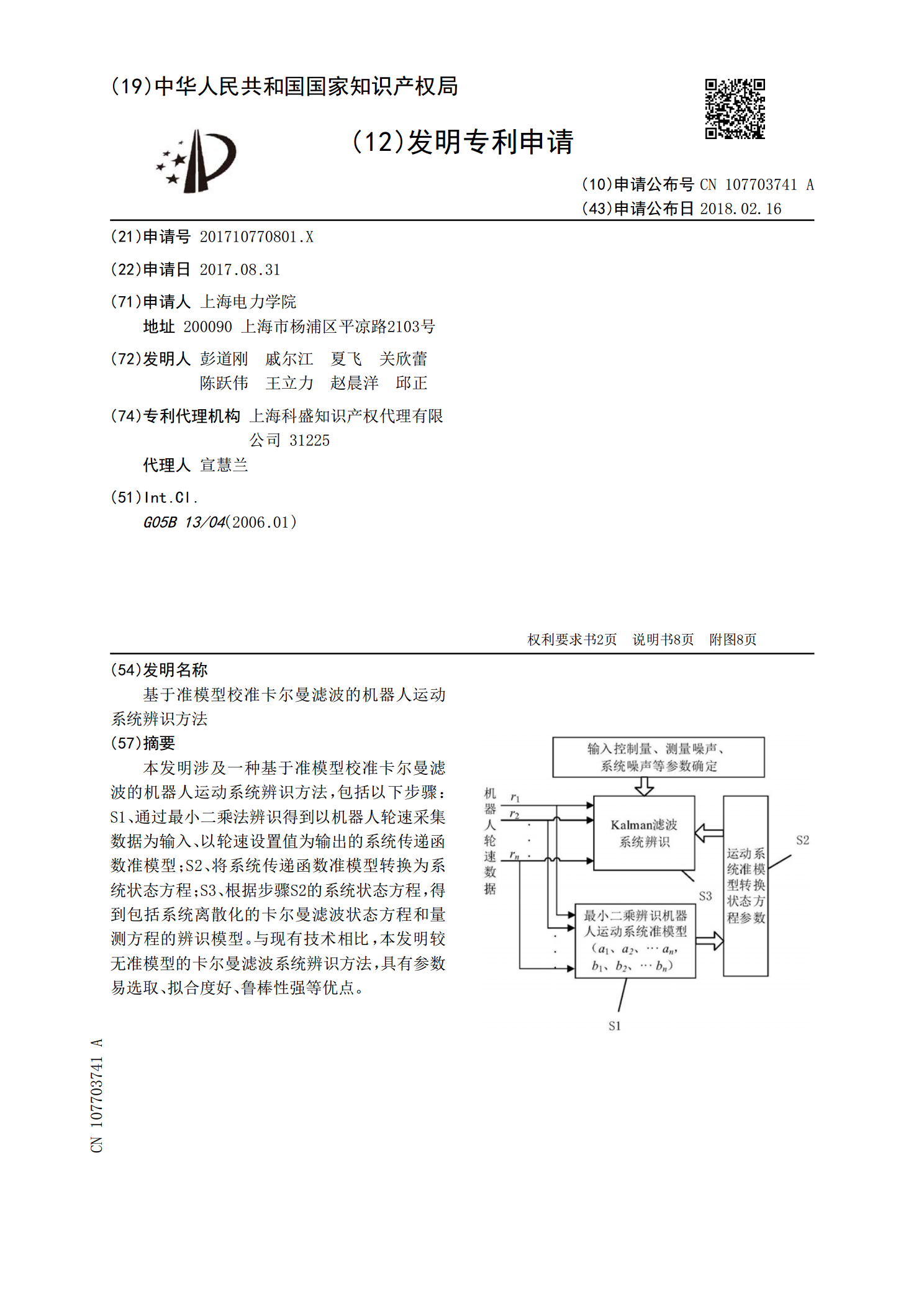
本发明涉及一种基于准模型校准卡尔曼滤波的机器人运动系统辨识方法,包括以下步骤:S1、通过最小二乘法辨识得到以机器人轮速采集数据为输入、以轮速设置值为输出的系统传递函数准模型;S2、将系统传递函数准模型转换为系统状态方程;S3、根据步骤S2的系统状态方程,得到包括系统离散化的卡尔曼滤波状态方程和量测方程的辨识模型。与现有技术相比,本发明较无准模型的卡尔曼滤波系统辨识方法,具有参数易选取、拟合度好、鲁棒性强等优点。

卡尔曼滤波方法.ppt
卡尔曼滤波方法应用数值预报产品的释用技术方法:1、人的经验为主的定性方法﹙天气学方法)。2、客观定量方法(统计学方法、动力释用方法、神经元网络)。MOS方法是被广泛释用的数值产品方法,是以数值产品历史资料为基础建立MOS方程的,资料年限太短(不足一年),方程统计特性差,资料年限长(2-3年),方程统计特性好,但在积累资料及用MOS方程作预报时不能改进及更新模式。在数值预报迅速发展的今天显然是不可能的。MOS方法示意图解决途径如下:1、根据新模式的统计特征,对MOS方程进行订正。2、用新模式重新对2-3年的

一种基于交互多模型卡尔曼滤波的被动协同定位滤波算法研究.docx
一种基于交互多模型卡尔曼滤波的被动协同定位滤波算法研究一种基于交互多模型卡尔曼滤波的被动协同定位滤波算法研究摘要:在许多应用中,协同定位被广泛使用。在协同定位中,每个节点通过收集来自周围节点的测距信息,从而推断出自身位置。在这种情况下,传感器错误和误差可能会影响协同定位的精度和鲁棒性。因此,改进协同定位算法的精确度和鲁棒性是一个挑战。本文提出了一种新的基于交互多模型卡尔曼滤波的被动协同定位滤波算法,可以增强多节点协同定位的精度和鲁棒性。关键词:被动协同定位,卡尔曼滤波,交互多模型,多节点1.简介在无线传感