
一种无线寻车方法及系统.pdf

书生****瑞梦


1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无线寻车方法及系统.pdf
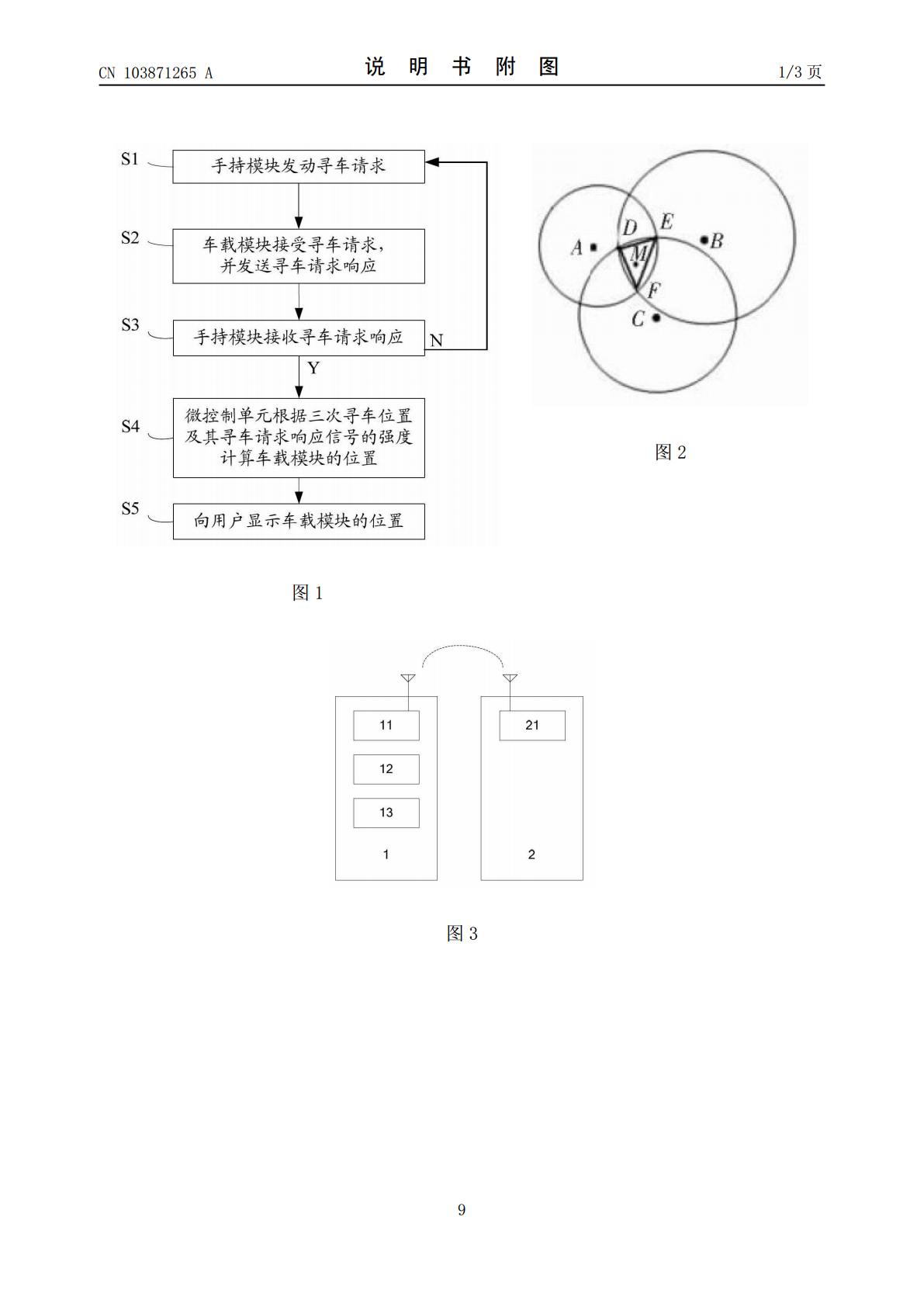
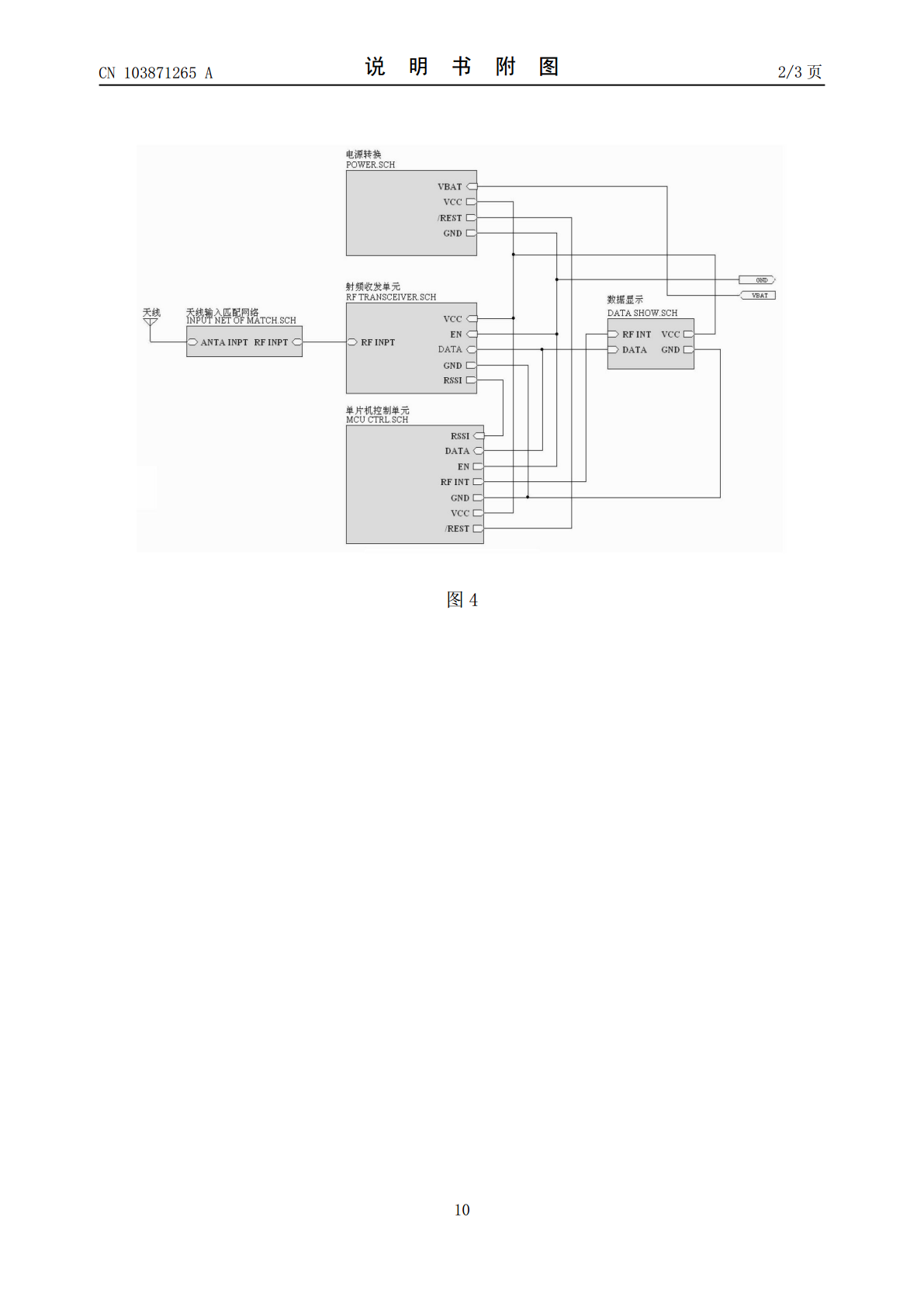
本发明实施例的一种无线寻车方法,包括:用户触发手持模块的寻车功能,手持模块向车载模块发出寻车请求;车载模块接收来自手持模块发出的寻车请求并且向手持模块发出寻车请求响应;手持模块接收来自车载模块发出的寻车请求响应;用户携带手持模块在三个寻车位置重复三次上述步骤,获得三次寻车请求响应信号,手持模块中的微控制单元根据三个寻车位置以及三次寻车请求响应信号的强度,计算车载模块的位置;以及手持模块向用户显示车载模块的位置,即为显示实车的位置。本发明能通过双向通信更准确的确定汽车所在方位与距离,克服传统寻车单向通信方案
一种基于手机蓝牙的自行车无线寻车器及寻车系统.pdf
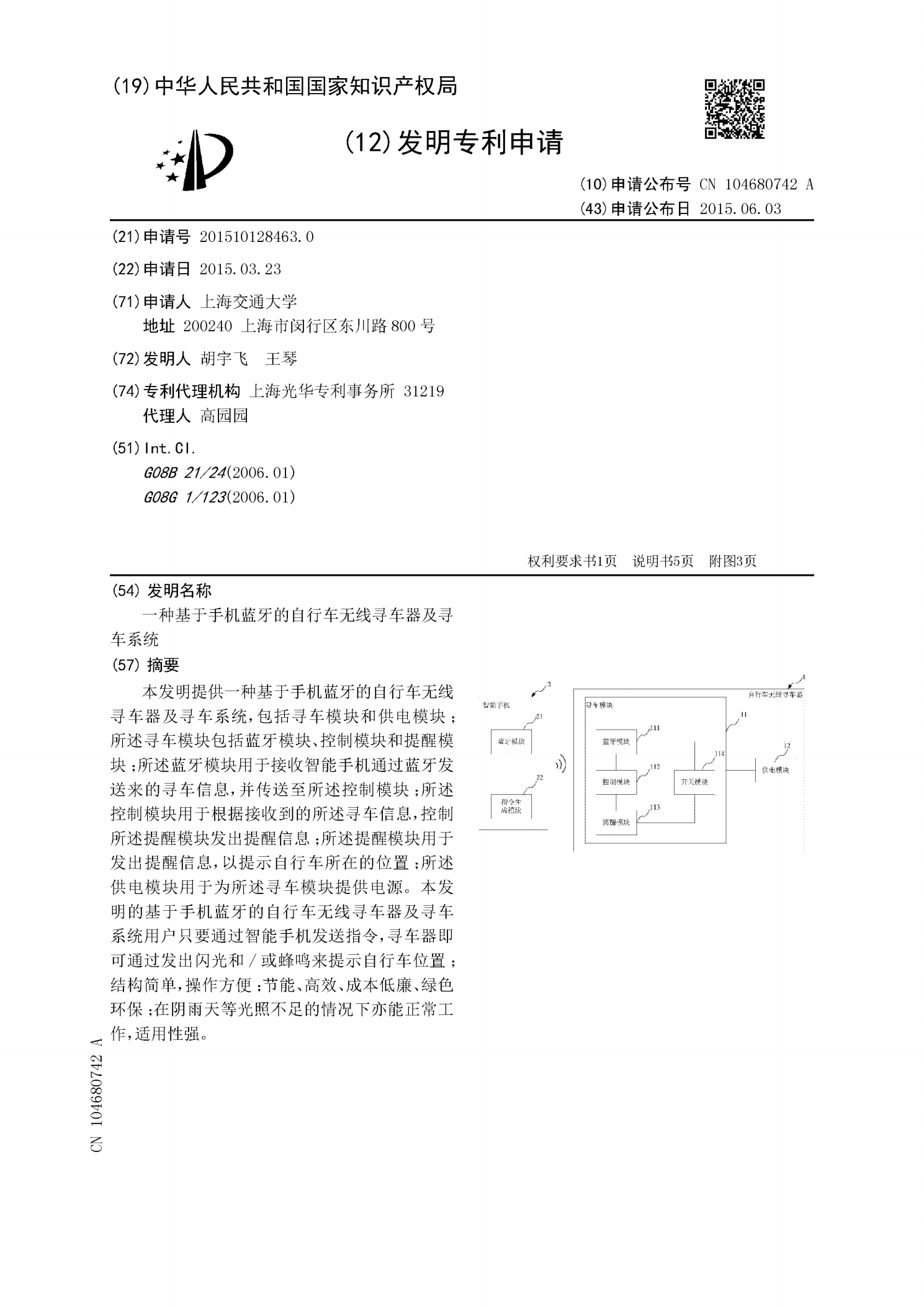
本发明提供一种基于手机蓝牙的自行车无线寻车器及寻车系统,包括寻车模块和供电模块;所述寻车模块包括蓝牙模块、控制模块和提醒模块;所述蓝牙模块用于接收智能手机通过蓝牙发送来的寻车信息,并传送至所述控制模块;所述控制模块用于根据接收到的所述寻车信息,控制所述提醒模块发出提醒信息;所述提醒模块用于发出提醒信息,以提示自行车所在的位置;所述供电模块用于为所述寻车模块提供电源。本发明的基于手机蓝牙的自行车无线寻车器及寻车系统用户只要通过智能手机发送指令,寻车器即可通过发出闪光和/或蜂鸣来提示自行车位置;结构简单,操作
寻车方法、移动终端及寻车系统.pdf
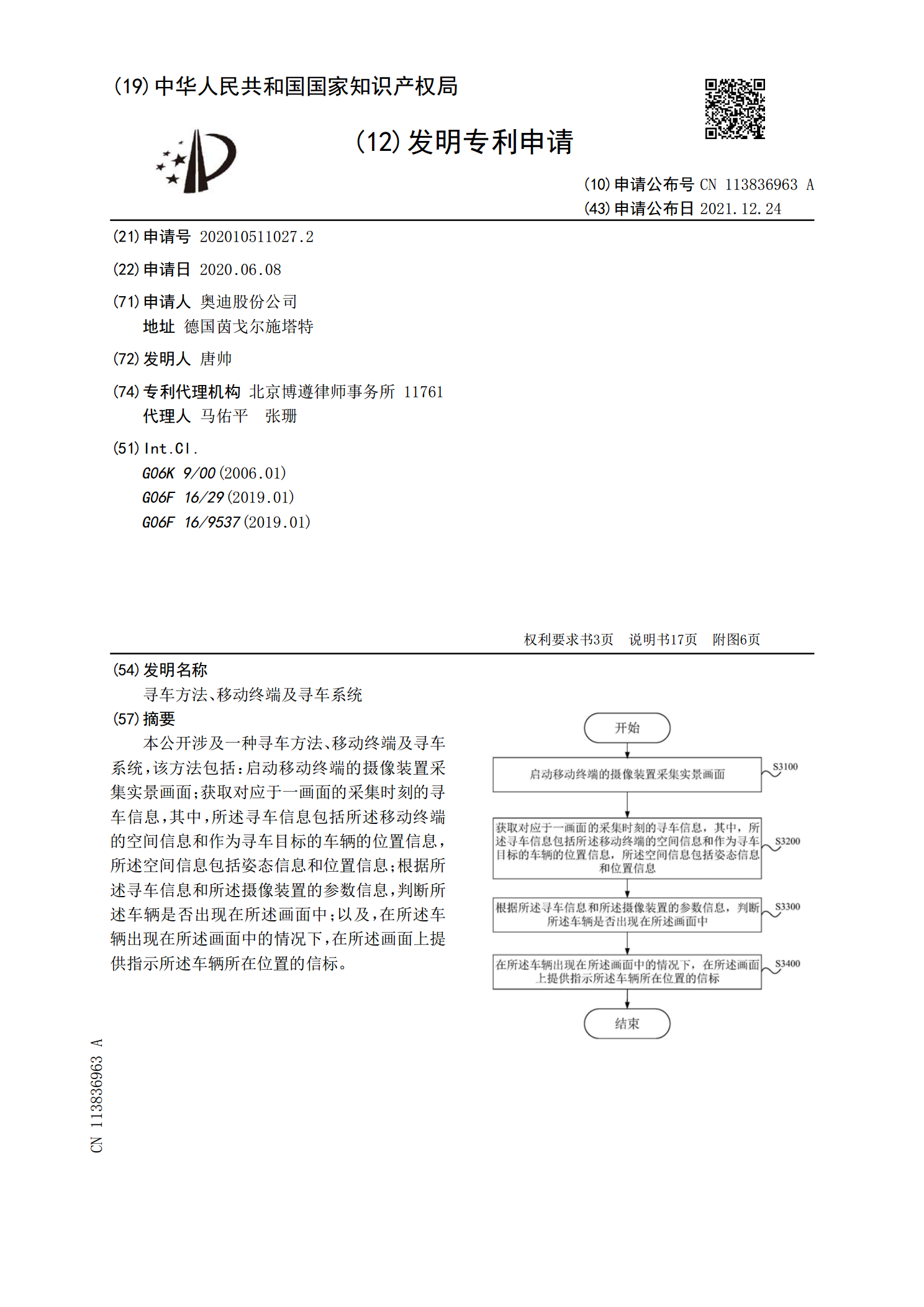
本公开涉及一种寻车方法、移动终端及寻车系统,该方法包括:启动移动终端的摄像装置采集实景画面;获取对应于一画面的采集时刻的寻车信息,其中,所述寻车信息包括所述移动终端的空间信息和作为寻车目标的车辆的位置信息,所述空间信息包括姿态信息和位置信息;根据所述寻车信息和所述摄像装置的参数信息,判断所述车辆是否出现在所述画面中;以及,在所述车辆出现在所述画面中的情况下,在所述画面上提供指示所述车辆所在位置的信标。

一种智能寻车系统和方法.pdf
本发明提供一种智能寻车系统和方法,该系统包括车载行停车记录单元和接收显示单元,通过车载行停车记录单元生成停车信息和随身携带的接收显示单元接收显示停车信息;该方法通过检测运行的车载行停车设备的供电模式判断停车状态,生成停车信息并通过便携式移动终端接收显示上述信息;以解决停车之后取车时不能找不到停车位置的问题。该发明提供一种智能寻车系统和方法,不需要全程联网,也不需要复杂的装置支持或清楚的场地标识指引,仍能高效地找到车所停的位置。
一种智能寻车方法、系统及车辆.pdf
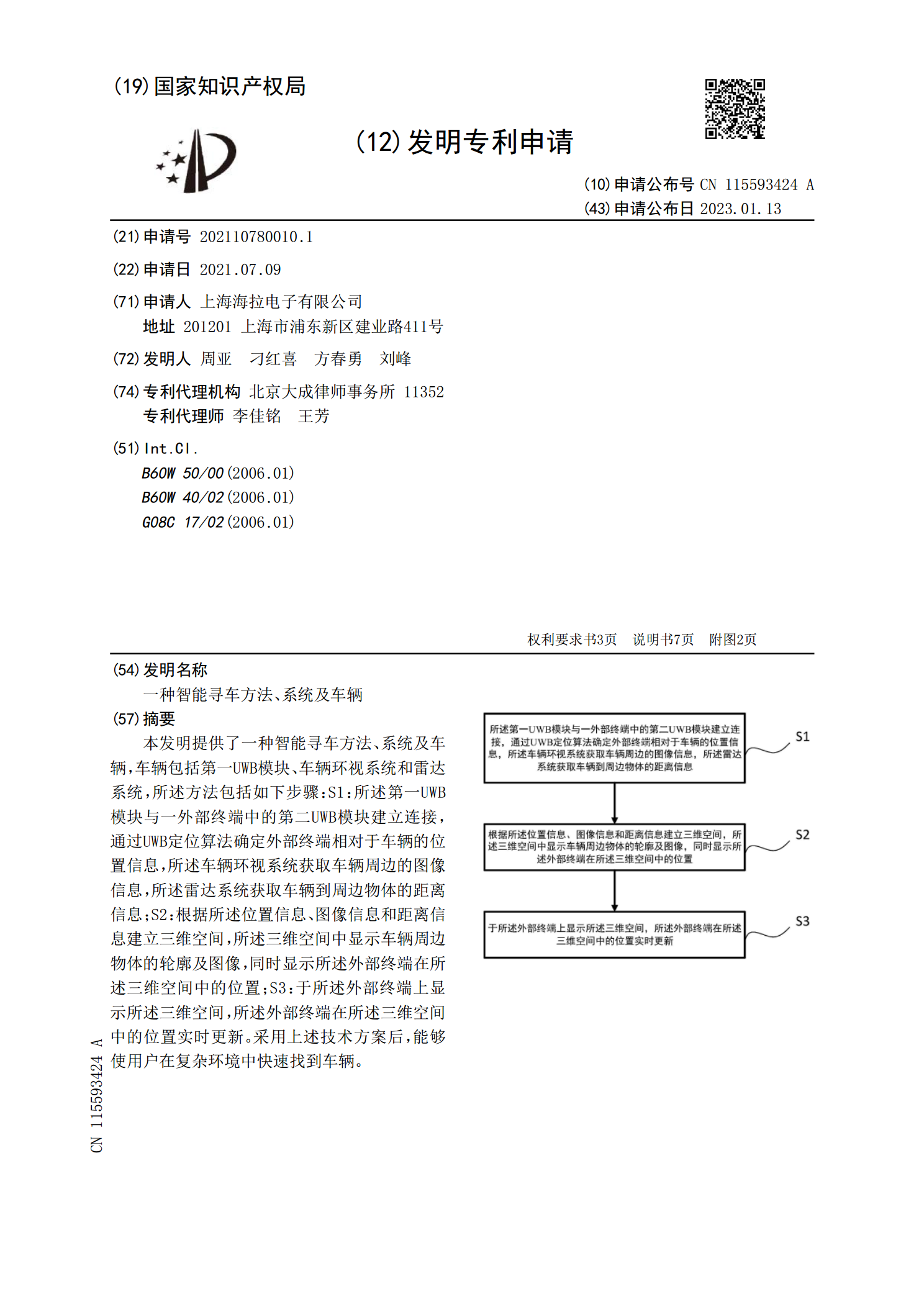
本发明提供了一种智能寻车方法、系统及车辆,车辆包括第一UWB模块、车辆环视系统和雷达系统,所述方法包括如下步骤:S1:所述第一UWB模块与一外部终端中的第二UWB模块建立连接,通过UWB定位算法确定外部终端相对于车辆的位置信息,所述车辆环视系统获取车辆周边的图像信息,所述雷达系统获取车辆到周边物体的距离信息;S2:根据所述位置信息、图像信息和距离信息建立三维空间,所述三维空间中显示车辆周边物体的轮廓及图像,同时显示所述外部终端在所述三维空间中的位置;S3:于所述外部终端上显示所述三维空间,所述外部终端在所