
一种快速精确确定林窗形状和面积的方法.pdf

运升****魔王


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种快速精确确定林窗形状和面积的方法.pdf
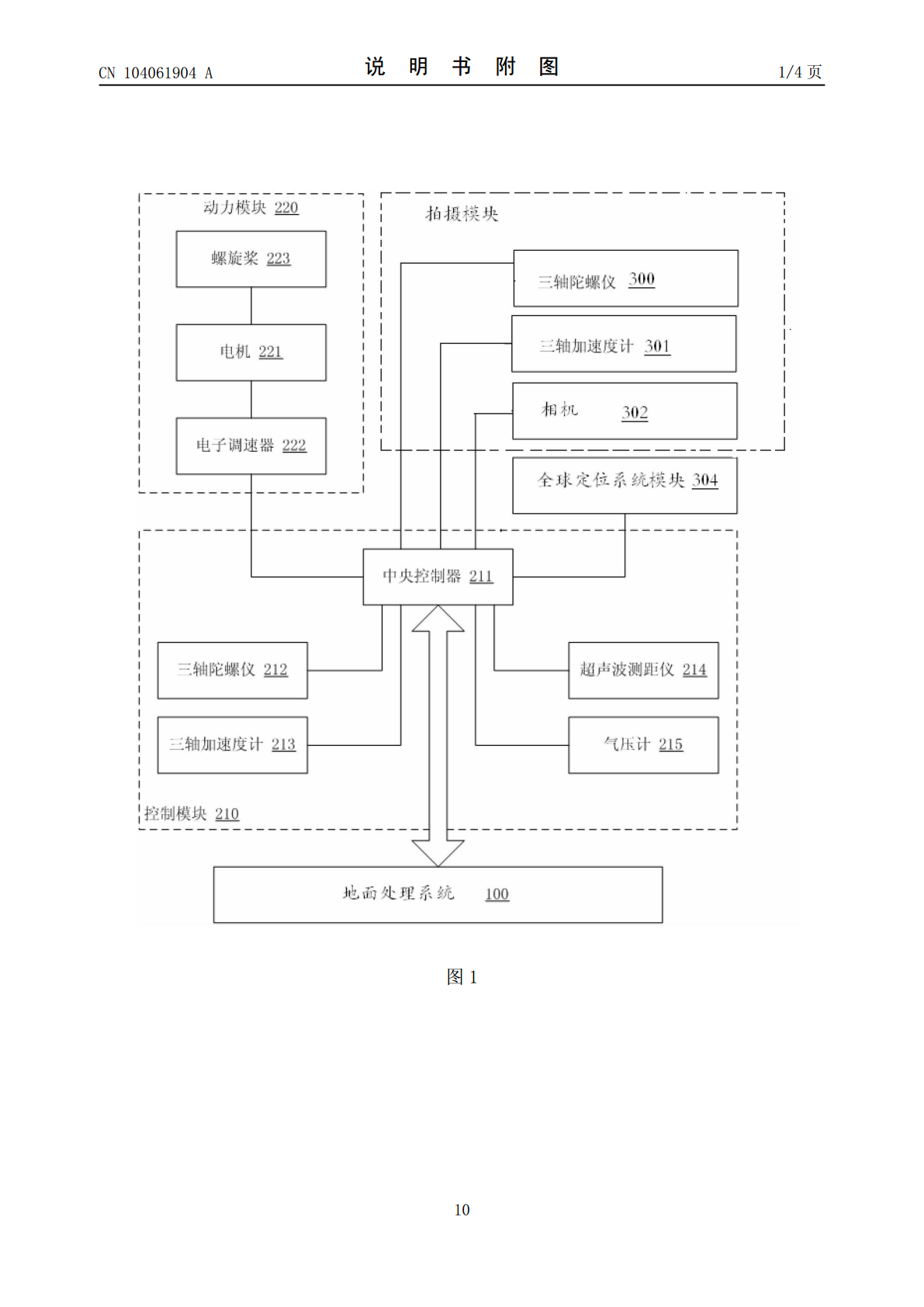
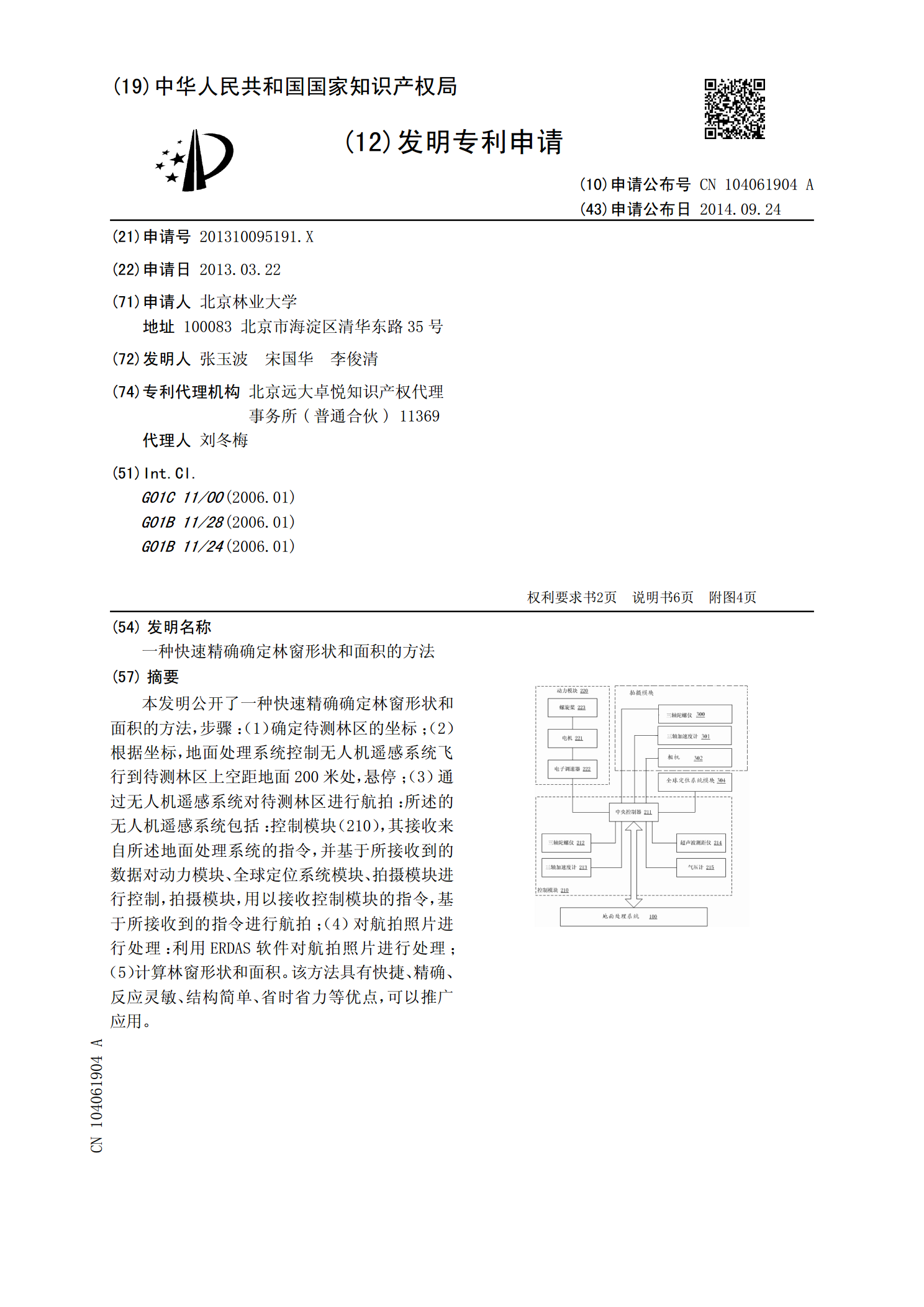
本发明公开了一种快速精确确定林窗形状和面积的方法,步骤:(1)确定待测林区的坐标;(2)根据坐标,地面处理系统控制无人机遥感系统飞行到待测林区上空距地面200米处,悬停;(3)通过无人机遥感系统对待测林区进行航拍:所述的无人机遥感系统包括:控制模块(210),其接收来自所述地面处理系统的指令,并基于所接收到的数据对动力模块、全球定位系统模块、拍摄模块进行控制,拍摄模块,用以接收控制模块的指令,基于所接收到的指令进行航拍;(4)对航拍照片进行处理:利用ERDAS软件对航拍照片进行处理;(5)计算林窗形状和面

一种气垫式外窗精确定位安装方法.pdf
本发明公开了一种气垫式外窗精确定位安装,包括储气囊、定型框和开设在墙体上的安装槽,所述储气囊的数量为若干个,且所述储气囊垫设在所述定型框和所述安装槽之间,所述定型框设置在所述安装槽内,且所述定型框与窗框固定连接,所述储气囊一侧设有与囊内连通的进气管,所述进气管通过密封组件安装有气管,所述气管另一端设有充气囊,所述充气囊上设有一个单向进气阀、单向出气阀和手控排气阀,所述单向进气阀的进气口与所述充气囊连通,出气口与气管连通。有益效果:本装置可以多次重复使用,有效的控制安装误差,杜绝遗漏木楔的情况发生,单个气垫

一种快速精确定量投料装置.pdf
本发明公开了一种快速精确定量投料装置,包括储料腔和控制系统,所述储料腔的下侧设有第一落料口,所述第一落料口的下侧设有拨粉通道,所述拨粉通道内设有拨轮,所述拨轮上设有若干个沿圆周方向均匀分布的拨片,所述第一驱动电机驱动拨轮转动,所述第一落料口位于所述拨轮的左侧,所述拨轮的右侧设有第一供料口,所述第一供料口通过拨粉通道与第一落料口连通。出于实现功能的需要,送料通道的侧壁与拨轮的外形相对应,从而通过设置拨轮,拨轮包括有多个均匀分布的拨片从而拨轮每转动一定的角度其可以将一定的饲料从拨料通道的左侧送往拨料通道的右侧

一种快速精确定位靠尺.pdf
本发明是一种快速精确定位靠尺,属于加工设备上的靠尺机构。包括靠尺、滑台、滑轨和丝杆,其特征在于滑台中间设有仅限上下滑动的半螺母,在丝杆的一端还设有刻度手轮,向上或向下滑动半螺母可使半螺母与丝杆处于螺纹咬合或螺纹分离状态,由于半螺母与丝杆可以分离,所以靠尺可以在导轨上快速的移动,螺纹咬合后由刻度手轮进行微量调节,可以使尺寸定位极为精确,在实际作业中可以显著提升工作效率及加工质量,并可使操作人员在使用过程中显得轻松愉快。

光缆线路故障的快速精确定位方法.docx
光缆线路故障的快速精确定位方法标题:光缆线路故障的快速精确定位方法摘要:随着通信技术的快速发展,光缆线路故障的精确定位成为通信工程领域中的重要课题。本文针对光缆线路故障定位问题进行研究,总结了目前常用的快速精确定位方法,并对其优缺点进行了分析。同时,根据实际情况提出了一种基于OTDR技术和机器学习算法的光缆线路故障快速精确定位方法,该方法可有效提高故障定位的准确性和效率。本文的研究成果对于光缆线路故障定位的实际应用有着重要的指导意义。关键词:光缆线路故障、快速定位、OTDR、机器学习算法1.引言光缆线路作