
改进的煤矿井下人员定位算法.pdf

是雁****找我


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
改进的煤矿井下人员定位算法.pdf
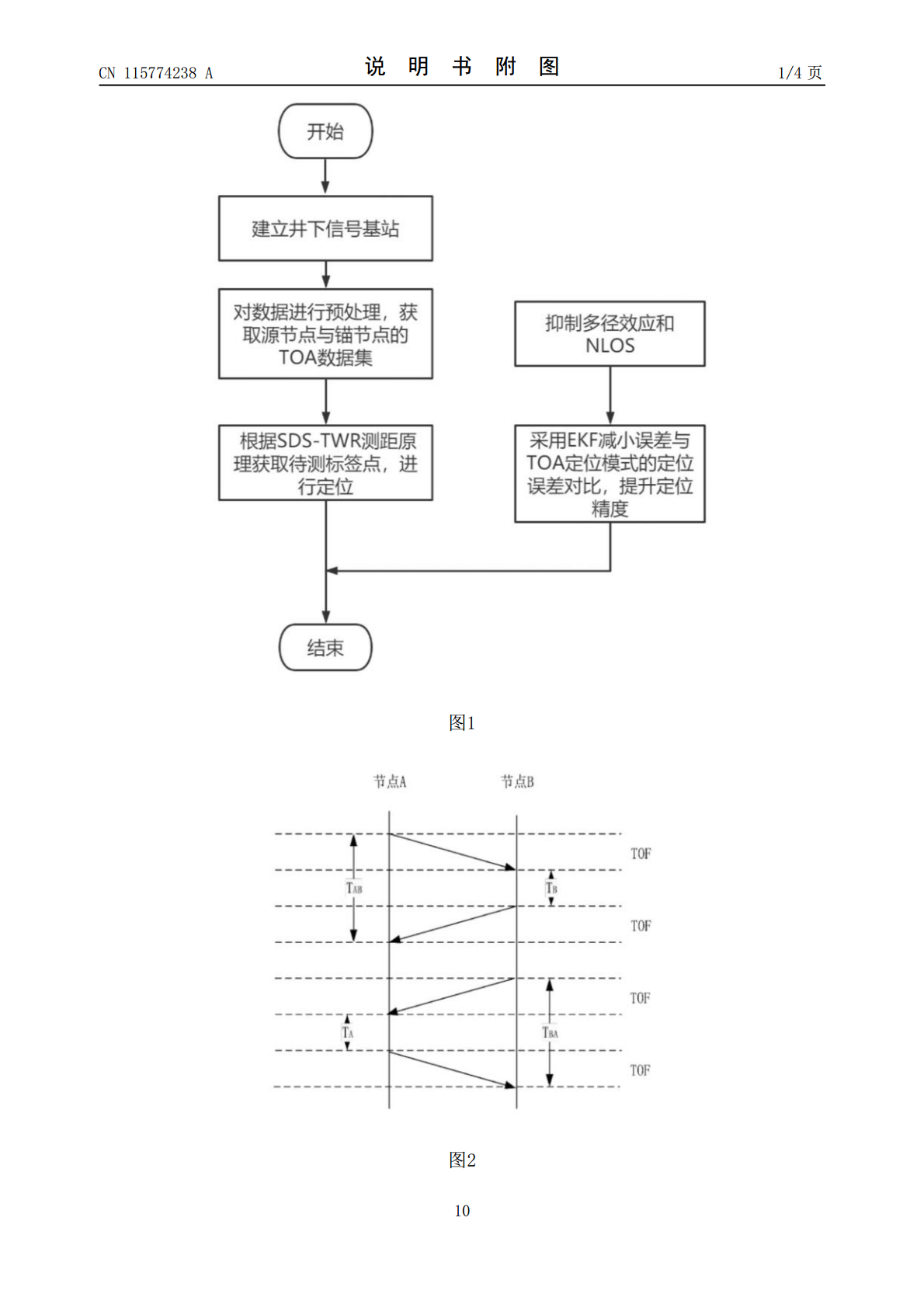
本发明涉及改进的煤矿井下人员定位算法。基于到达时间测距算法的测距技术,同时融合了改进的卡尔曼滤波定位算法对井下人员进行定位,具体方法:建立井下信号基站;对数据进行预处理,获取源节点与锚节点的TOA数据集;采用TOA方法中待测距离、信号到达时间、传播速度之间的关系实现目标位置待测标签的检测;引入改进卡尔曼滤波技术提升定位精度;首先将原数据进行卡尔曼滤波运算,并进行定位实验;利用MATLAB验证算法有效性;构建煤矿井下人员定位模型,对井下人员进行测距定位,得到待测节点位置。本发明采用改进卡尔曼滤波算法,弥补卡

基于改进加权质心算法的煤矿井下人员定位系统设计.docx
基于改进加权质心算法的煤矿井下人员定位系统设计基于改进加权质心算法的煤矿井下人员定位系统设计摘要煤矿井下人员定位是煤矿安全监控系统中的重要环节,对于发生事故时的救援和紧急疏散起着至关重要的作用。本论文提出了一种基于改进加权质心算法的煤矿井下人员定位系统设计。通过采集传感器数据、建立加权质心模型和优化算法,实现了对井下人员的精确定位和追踪。实验结果表明,该系统具有较高的定位精度和鲁棒性,可以为煤矿安全生产提供有效的支持。关键词:煤矿,井下人员定位,加权质心算法,传感器数据,定位精度1.引言随着煤矿安全生产的

煤矿井下人员跟踪定位算法研究.docx
煤矿井下人员跟踪定位算法研究煤矿井下人员的跟踪定位算法研究摘要:煤矿是重要的能源资源,但同时也是危险的工作环境。煤矿的安全管理是保障矿工生命财产安全的重点工作之一。人员跟踪定位技术在煤矿安全管理中起到了关键的作用。本文将对煤矿井下人员跟踪定位算法进行研究,分析现有的技术和算法,并提出改进方案,以提高煤矿井下人员跟踪定位的准确性和实时性。1.引言煤矿作为一种重要的能源资源,是国民经济的重要支撑。然而,由于煤矿作业环境的恶劣性和高风险性,煤矿安全事故时有发生。煤矿安全管理是保障矿工生命财产安全的重点工作之一。

基于改进TDOA在煤矿井下超宽带定位算法的研究.docx
基于改进TDOA在煤矿井下超宽带定位算法的研究摘要:针对煤矿井下超宽带定位技术存在定位精度不高、抗干扰能力弱等问题,本文提出了一种基于改进TDOA的超宽带定位算法。该算法通过对超宽带信号进行采集、处理和分析,利用多基站TDOA定位原理得到目标的位置信息,通过对TDOA算法的改进,能够有效提高定位精度和抗干扰能力,同时避免了算法计算复杂度的高问题。该算法在煤矿井下应用已经验证了其定位精度和可靠性。关键词:超宽带;TDOA;定位精度;抗干扰能力;改进算法一、引言随着科技的不断进步,煤矿行业也逐渐向智能化、自动

基于改进Kriging插值的煤矿井下定位算法.docx
基于改进Kriging插值的煤矿井下定位算法基于改进Kriging插值的煤矿井下定位算法摘要:煤矿井下定位是煤矿安全监控系统中的重要一环,准确的井下定位算法对于矿工安全和生产管理具有重要意义。传统的Kriging插值算法在井下定位中存在定位精度不高、计算复杂度高等问题。本文针对这些问题,并结合煤矿井下环境的特点,提出了一种基于改进Kriging插值的煤矿井下定位算法。通过在原始算法中引入半方差函数加权平均法和泛普里策拉定理,在不增加计算复杂度的情况下,提高了定位精度。实验结果表明,本文提出的算法能够有效提