
基于手势控制的智能轮椅系统及控制方法.pdf

书生****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于手势控制的智能轮椅系统及控制方法.pdf
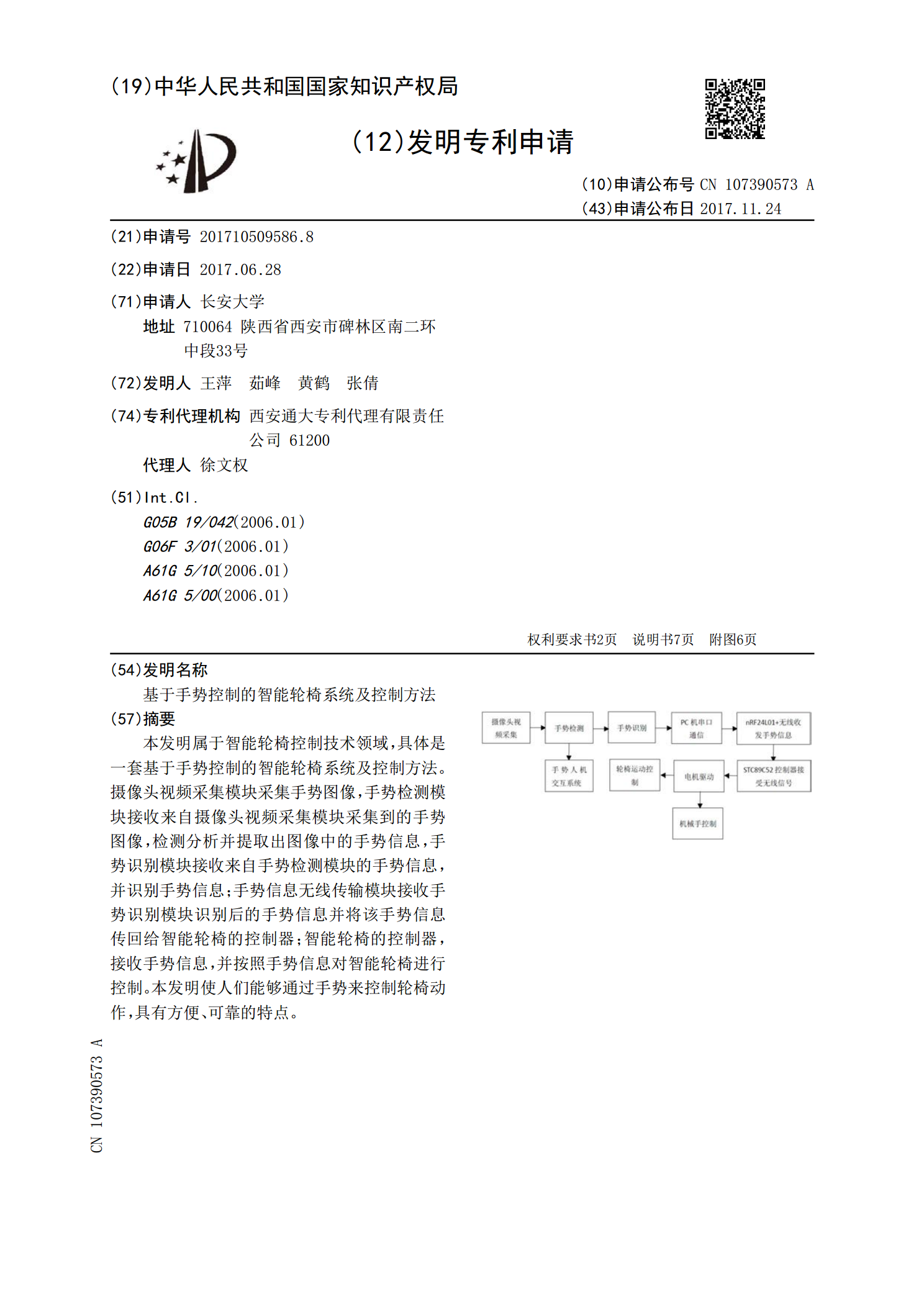
本发明属于智能轮椅控制技术领域,具体是一套基于手势控制的智能轮椅系统及控制方法。摄像头视频采集模块采集手势图像,手势检测模块接收来自摄像头视频采集模块采集到的手势图像,检测分析并提取出图像中的手势信息,手势识别模块接收来自手势检测模块的手势信息,并识别手势信息;手势信息无线传输模块接收手势识别模块识别后的手势信息并将该手势信息传回给智能轮椅的控制器;智能轮椅的控制器,接收手势信息,并按照手势信息对智能轮椅进行控制。本发明使人们能够通过手势来控制轮椅动作,具有方便、可靠的特点。

手势识别方法及基于手势识别控制的智能轮椅人机系统.pdf
本发明公开了一种手势识别方法及基于手势识别控制的智能轮椅人机系统,涉及计算机视觉、人机系统、控制领域,包括视频采集模块,分离器,查询模块,跟踪模块,手势预处理模块,特征提取模块,手势识别模块,控制模块,采用Camshift跟踪算法与Kalman滤波算法相结合的方法对人手进行跟踪,并分离出手势,结合Hu矩与支持向量机(SVM)对手势进行识别,该手势识别方法可以滤除肤色干扰、遮挡及周围复杂环境对手势分割的影响,实现对人手的精确跟踪和快速准确识别,用于基于手势识别的智能轮椅人机系统中,可以达到快速、准确的识别手
未知环境中基于自然手势指令的智能轮椅控制方法及系统.pdf
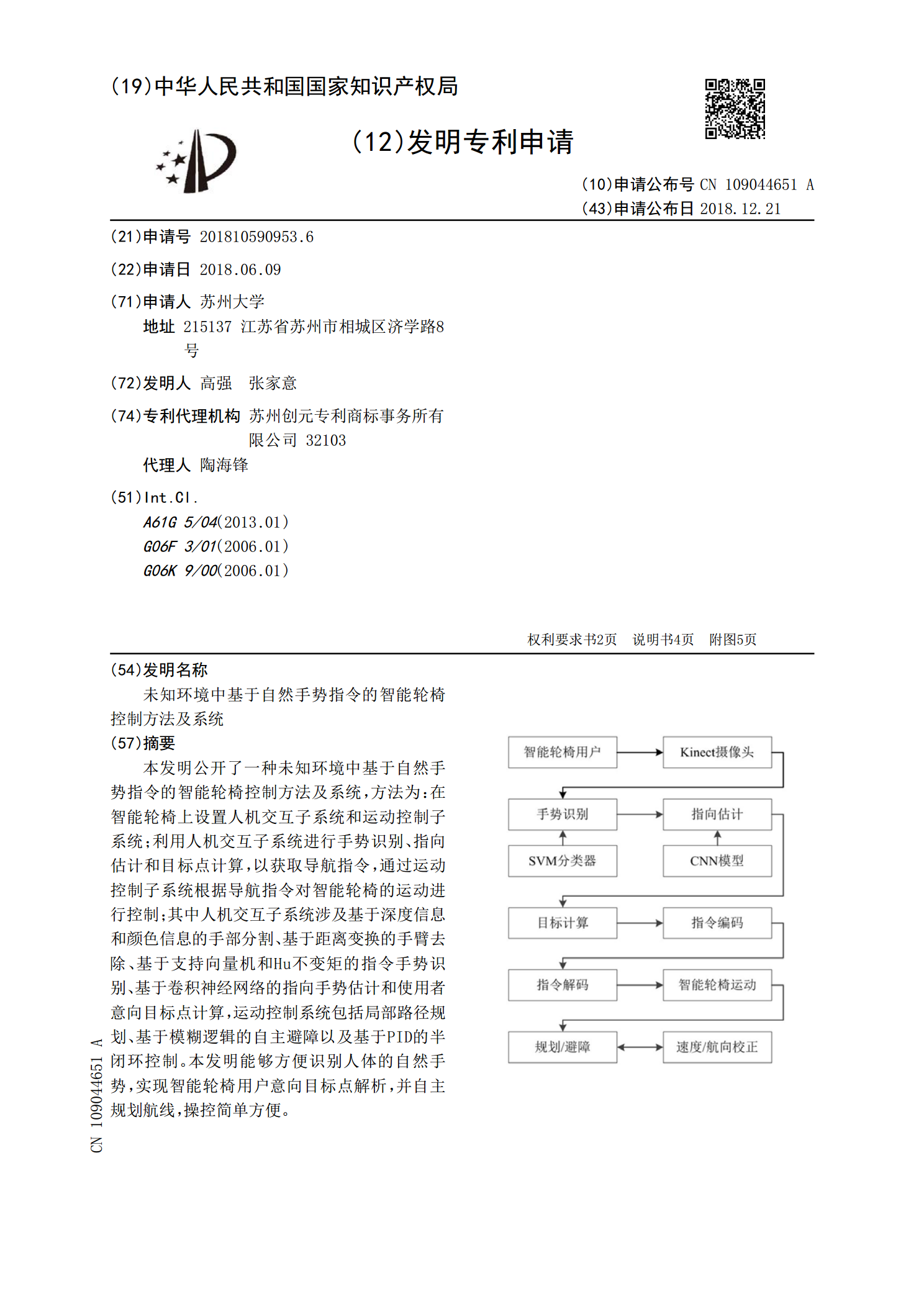
本发明公开了一种未知环境中基于自然手势指令的智能轮椅控制方法及系统,方法为:在智能轮椅上设置人机交互子系统和运动控制子系统;利用人机交互子系统进行手势识别、指向估计和目标点计算,以获取导航指令,通过运动控制子系统根据导航指令对智能轮椅的运动进行控制;其中人机交互子系统涉及基于深度信息和颜色信息的手部分割、基于距离变换的手臂去除、基于支持向量机和Hu不变矩的指令手势识别、基于卷积神经网络的指向手势估计和使用者意向目标点计算,运动控制系统包括局部路径规划、基于模糊逻辑的自主避障以及基于PID的半闭环控制。本发
基于手势控制电灯的方法及其智能电灯系统.pdf
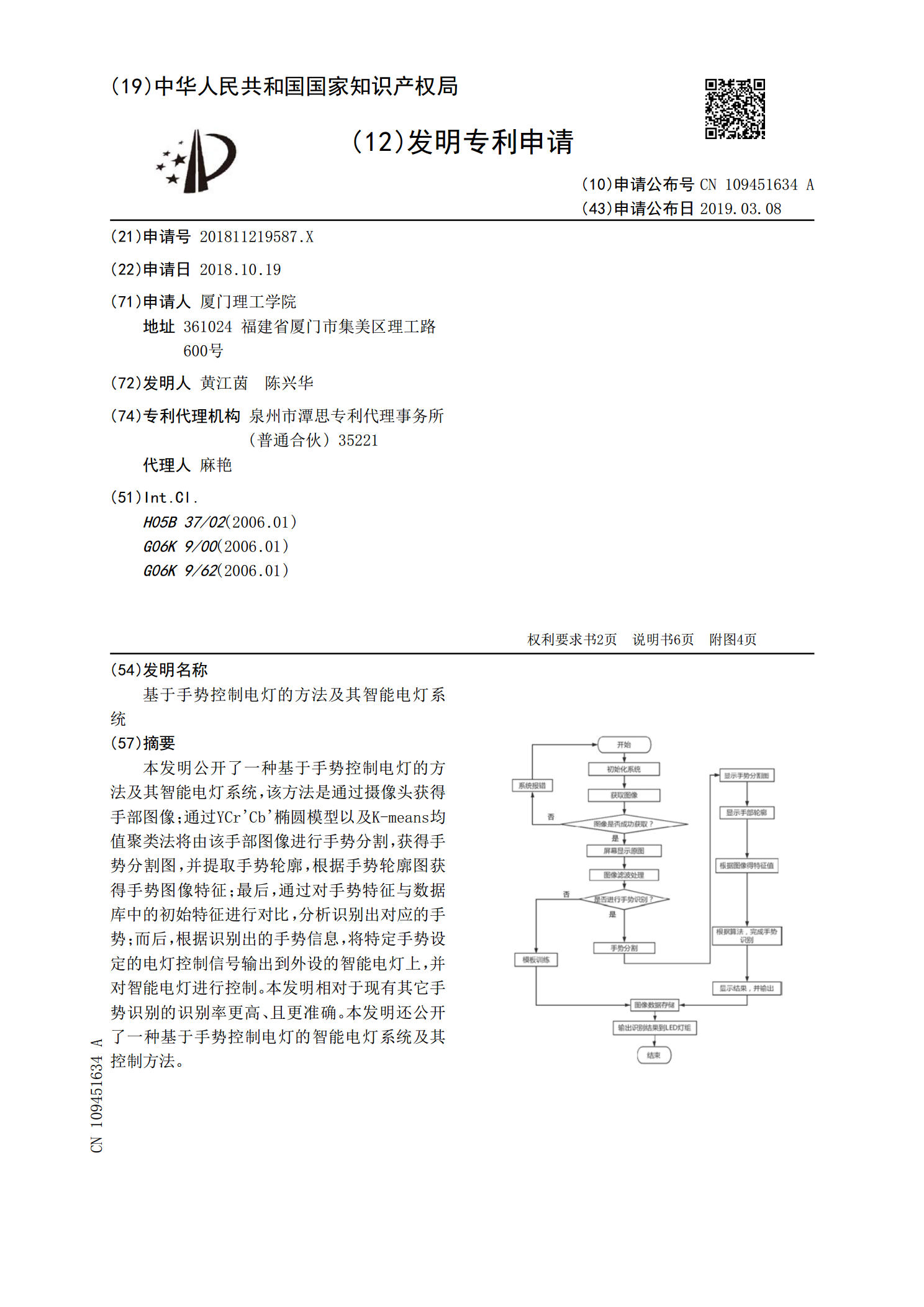
本发明公开了一种基于手势控制电灯的方法及其智能电灯系统,该方法是通过摄像头获得手部图像;通过YCr’Cb’椭圆模型以及K‑means均值聚类法将由该手部图像进行手势分割,获得手势分割图,并提取手势轮廓,根据手势轮廓图获得手势图像特征;最后,通过对手势特征与数据库中的初始特征进行对比,分析识别出对应的手势;而后,根据识别出的手势信息,将特定手势设定的电灯控制信号输出到外设的智能电灯上,并对智能电灯进行控制。本发明相对于现有其它手势识别的识别率更高、且更准确。本发明还公开了一种基于手势控制电灯的智能电灯系统及

智能感知轮椅的操控系统及智能轮椅的控制方法.pdf
智能感知轮椅的操控系统及智能轮椅的控制方法,涉及医疗机械领域,用于解决对轮椅自身信息的采集及控制问题,要点是包括操控器,所述操控器与计算机处理单元相接,所述计算机处理单元包括传感器模块、驱动模块和人机交互模块,所述传感器模块包括内部状态感知模块和外部环境状态感知模块,所述内部状态感知模块通过姿态传感器确定轮椅使用者的姿态信息,所述外部环境状态感知模块分别通过编码器的位移速度和距离获得自定位信息,效果是通过感知模块可以检测到轮椅上使用者的信息和外部环境的信息,进而便于轮椅自行判断前行路线,防止发生碰撞,利于