
一种三维模型纹理贴图方法及相关装置.pdf

篷璐****爱吗


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种三维模型纹理贴图方法及相关装置.pdf
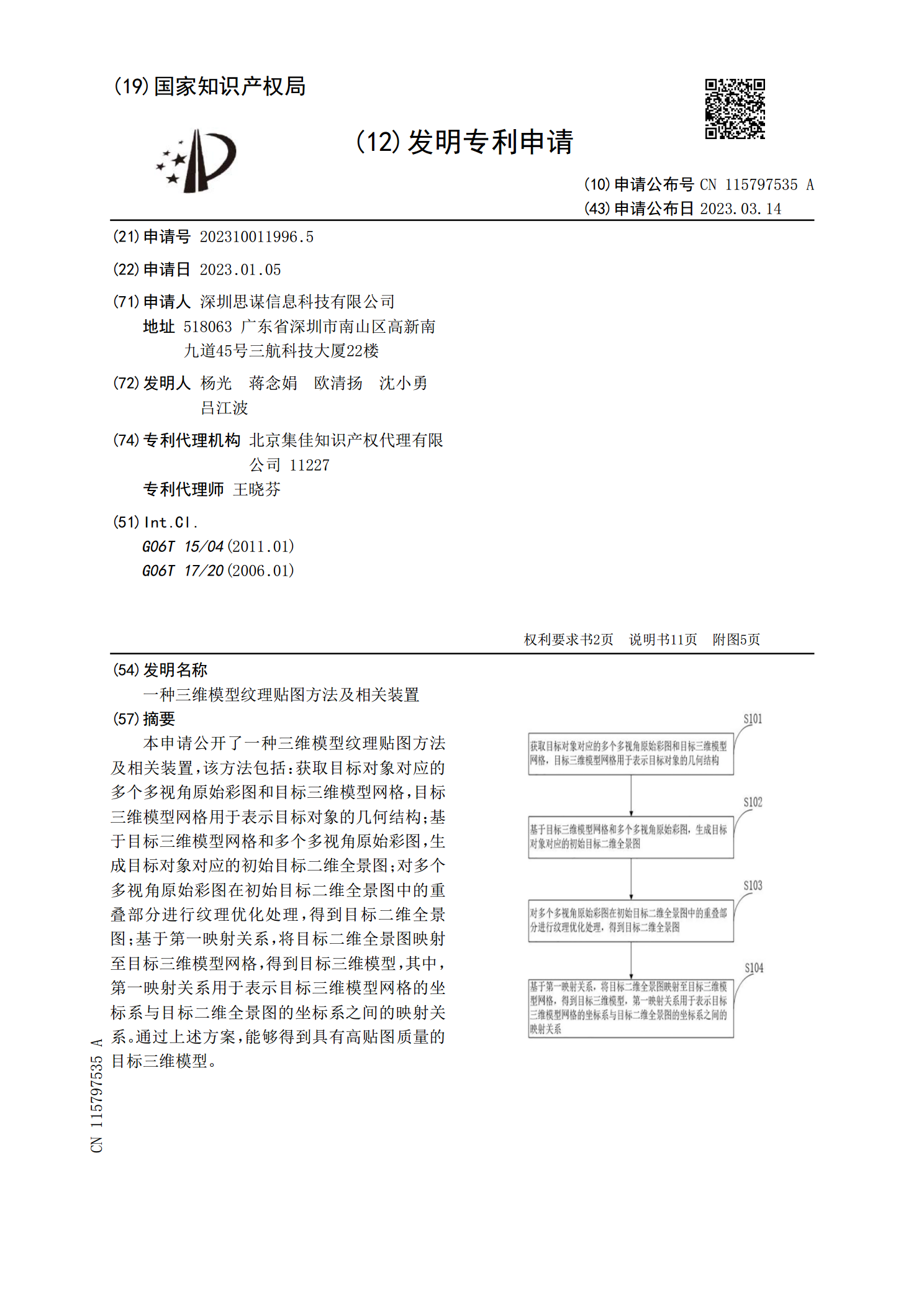
本申请公开了一种三维模型纹理贴图方法及相关装置,该方法包括:获取目标对象对应的多个多视角原始彩图和目标三维模型网格,目标三维模型网格用于表示目标对象的几何结构;基于目标三维模型网格和多个多视角原始彩图,生成目标对象对应的初始目标二维全景图;对多个多视角原始彩图在初始目标二维全景图中的重叠部分进行纹理优化处理,得到目标二维全景图;基于第一映射关系,将目标二维全景图映射至目标三维模型网格,得到目标三维模型,其中,第一映射关系用于表示目标三维模型网格的坐标系与目标二维全景图的坐标系之间的映射关系。通过上述方案,
用于三维场景重建的纹理贴图选择方法以及相关装置.pdf
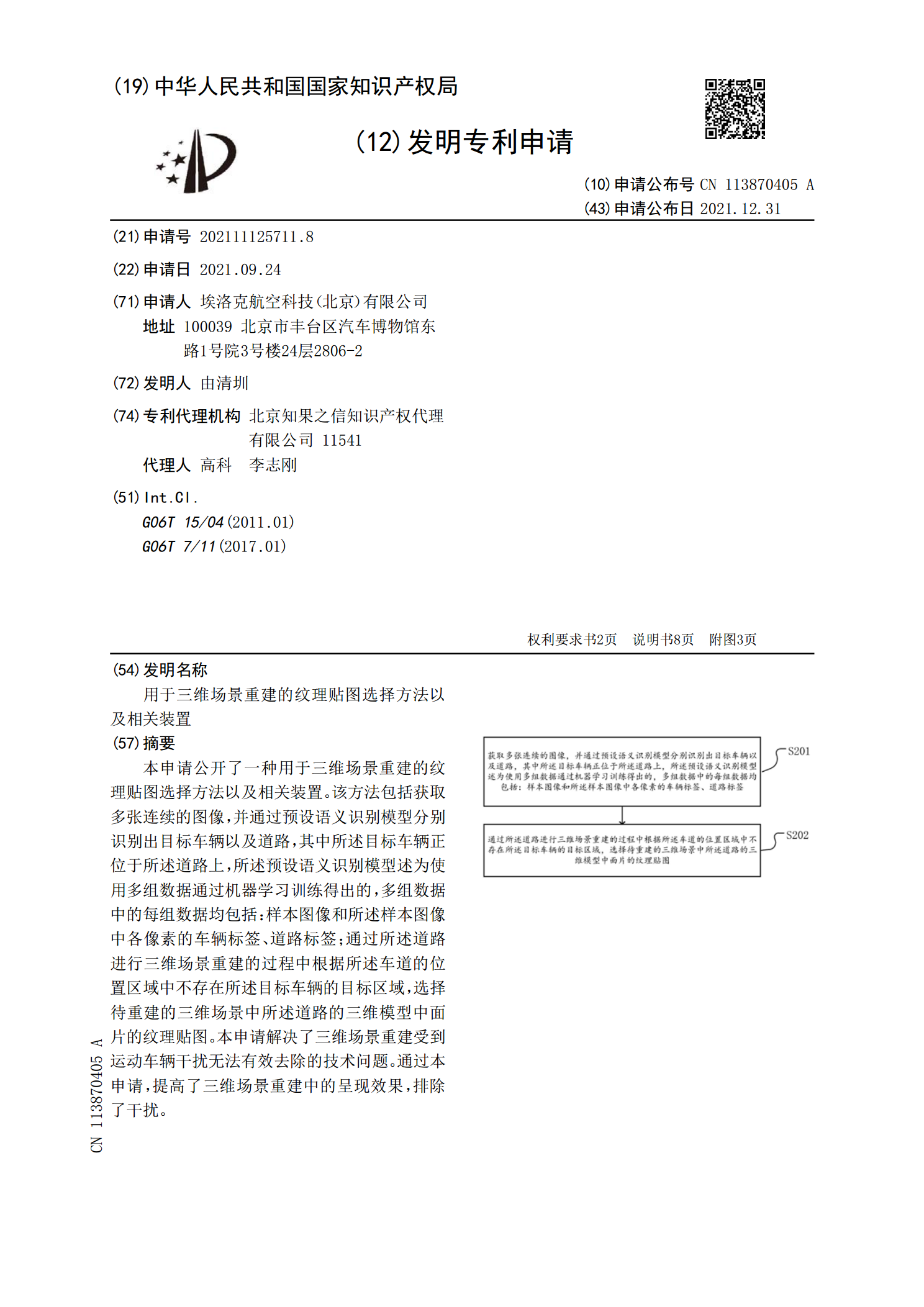
本申请公开了一种用于三维场景重建的纹理贴图选择方法以及相关装置。该方法包括获取多张连续的图像,并通过预设语义识别模型分别识别出目标车辆以及道路,其中所述目标车辆正位于所述道路上,所述预设语义识别模型述为使用多组数据通过机器学习训练得出的,多组数据中的每组数据均包括:样本图像和所述样本图像中各像素的车辆标签、道路标签;通过所述道路进行三维场景重建的过程中根据所述车道的位置区域中不存在所述目标车辆的目标区域,选择待重建的三维场景中所述道路的三维模型中面片的纹理贴图。本申请解决了三维场景重建受到运动车辆干扰无法
一种基于三维多纹理贴图方法.pdf
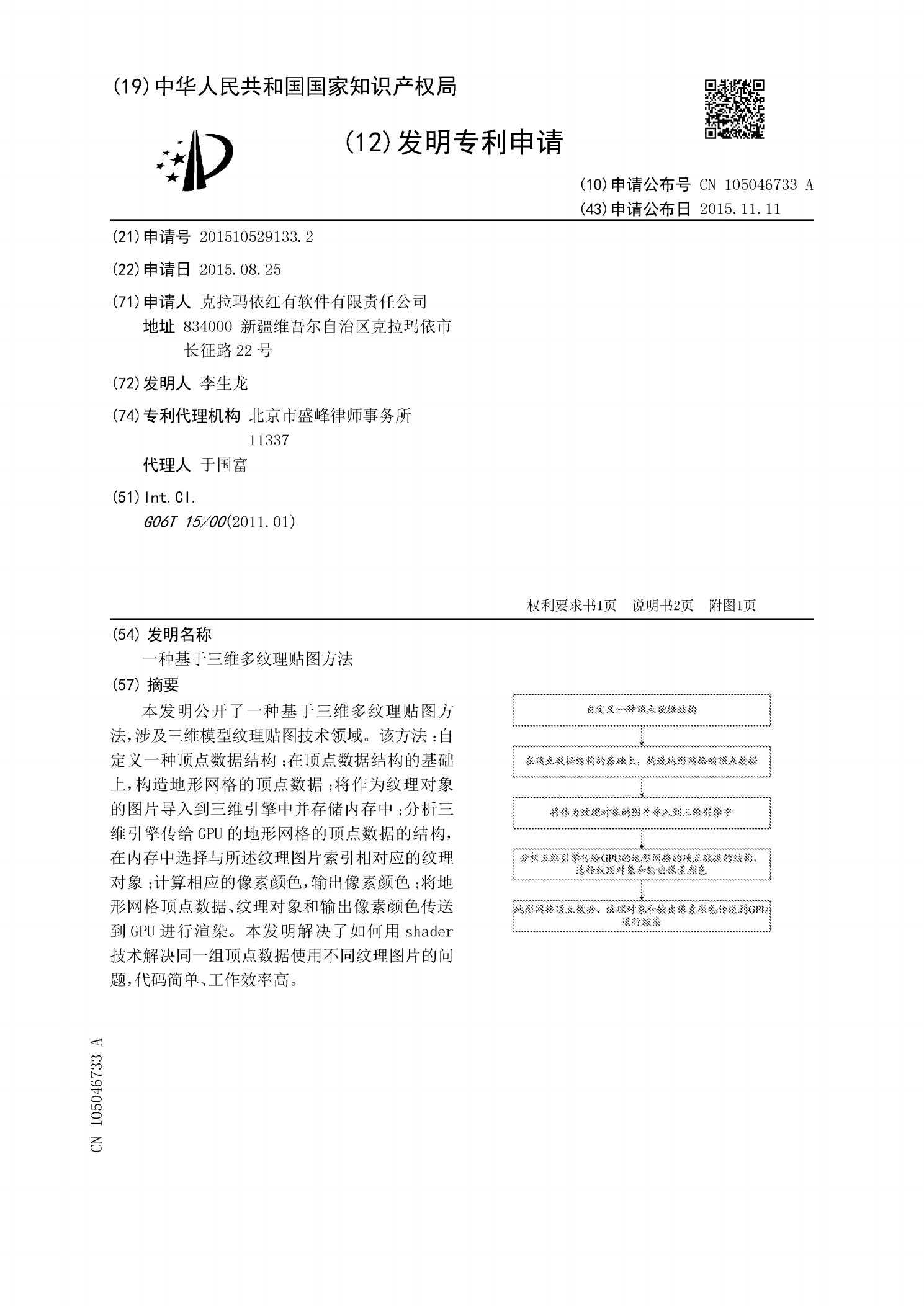
本发明公开了一种基于三维多纹理贴图方法,涉及三维模型纹理贴图技术领域。该方法:自定义一种顶点数据结构;在顶点数据结构的基础上,构造地形网格的顶点数据;将作为纹理对象的图片导入到三维引擎中并存储内存中;分析三维引擎传给GPU的地形网格的顶点数据的结构,在内存中选择与所述纹理图片索引相对应的纹理对象;计算相应的像素颜色,输出像素颜色;将地形网格顶点数据、纹理对象和输出像素颜色传送到GPU进行渲染。本发明解决了如何用shader技术解决同一组顶点数据使用不同纹理图片的问题,代码简单、工作效率高。

一种基于OBJ三维模型纹理贴图的信息隐藏算法.pptx
基于OBJ三维模型纹理贴图的信息隐藏算法01添加章节标题算法概述算法定义算法原理算法流程OBJ模型纹理贴图处理纹理贴图获取纹理贴图编码纹理贴图嵌入信息信息隐藏过程信息隐藏算法实现信息隐藏效果评估信息隐藏安全性分析实验与结果分析实验环境与数据集实验过程与结果结果分析性能评估算法优缺点与改进方向算法优点算法缺点改进方向应用前景与展望应用场景分析技术发展趋势研究展望感谢观看

一种纹理识别模型的训练、纹理迁移方法与相关装置.pdf
本发明提供了一种纹理识别模型的训练、纹理迁移方法与相关装置,该方法包括:获取第一图像数据;调用贴图检测网络从第一图像数据中提取多帧纹理贴图;调用参数检测网络从第一图像数据中提取纹理参数;将纹理贴图与纹理参数可微分地渲染至第一图像数据中的场景,获得第二图像数据;以第二图像数据作为监督信号,训练贴图检测网络与参数检测网络,贴图检测网络、参数检测网络不仅属于自动化操作,用户无感知,学习门槛低,而且具备将纹理渲染至场景的能力,使得设计师可以减少在纹理处理方面的操作,提高了操作的简便性,降低了建模耗费的时间和精力,