
一种耳机自适应有源噪声控制系统及方法.pdf

子璇****君淑

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种耳机自适应有源噪声控制系统及方法.pdf
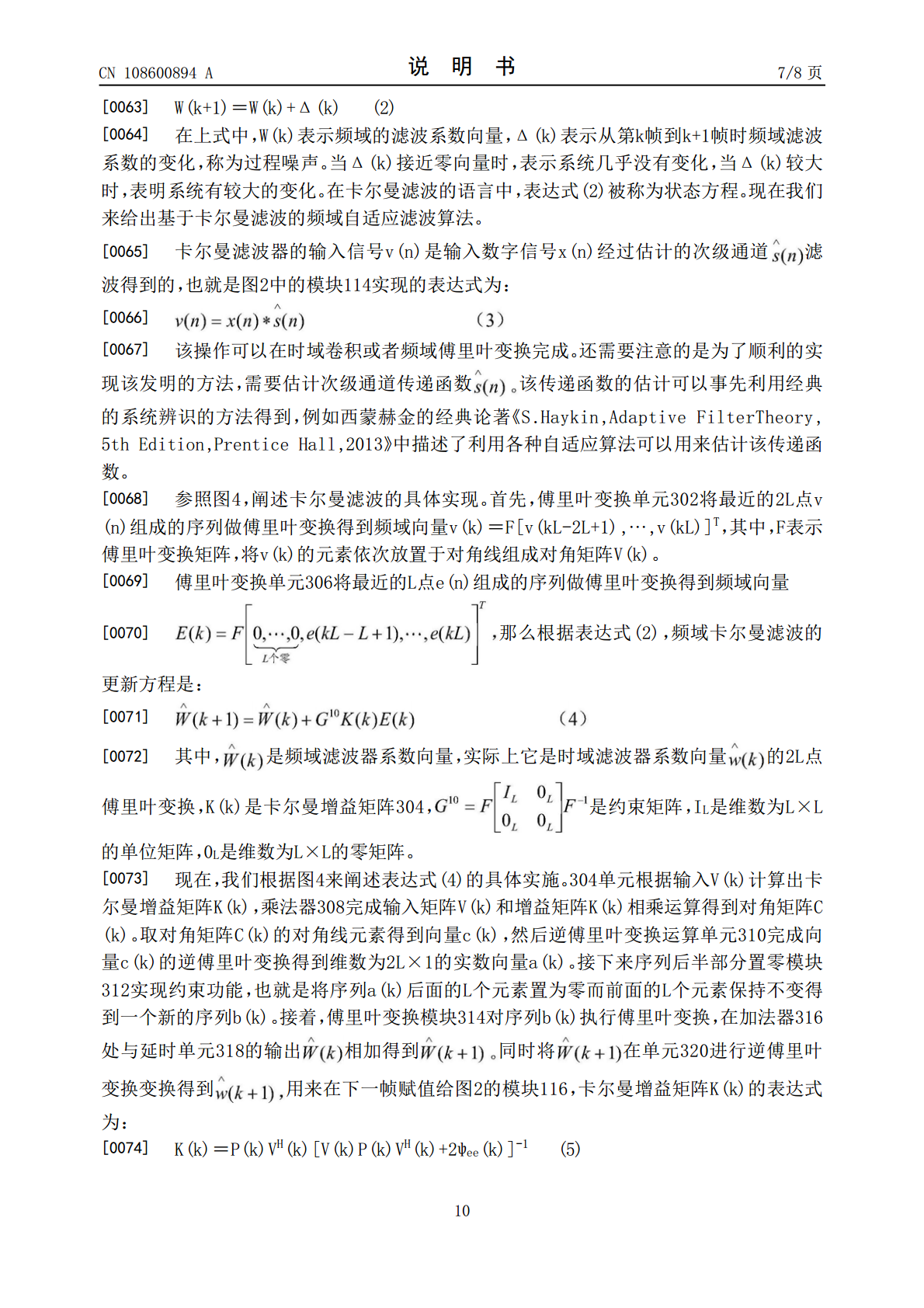
本发明公开了一种耳机自适应有源噪声控制系统及方法,该系统至少包括,一个用于采集采集噪音信号的参考麦克风,一个用于采集误差噪音信号的误差麦克风,参考麦克风设于耳机外部,误差麦克风设于耳机内部;一个扬声器单元,用于播放次级声信号;两个模数转换器AD,分别用于将参考噪音信号和误差噪音信号转换为对应的数字信号;一个数模转换器DA,用于将滤波输出信号转化成模拟信号并馈给次级扬声器;一个处理器,用于更新滤波系数并产生次级扬声器的输入信号。该发明能够解决普通自适应算法实时跟踪能力不足和计算延时过大等问题,对不同的环境和
一种耳机噪声处理方法、装置及耳机.pdf
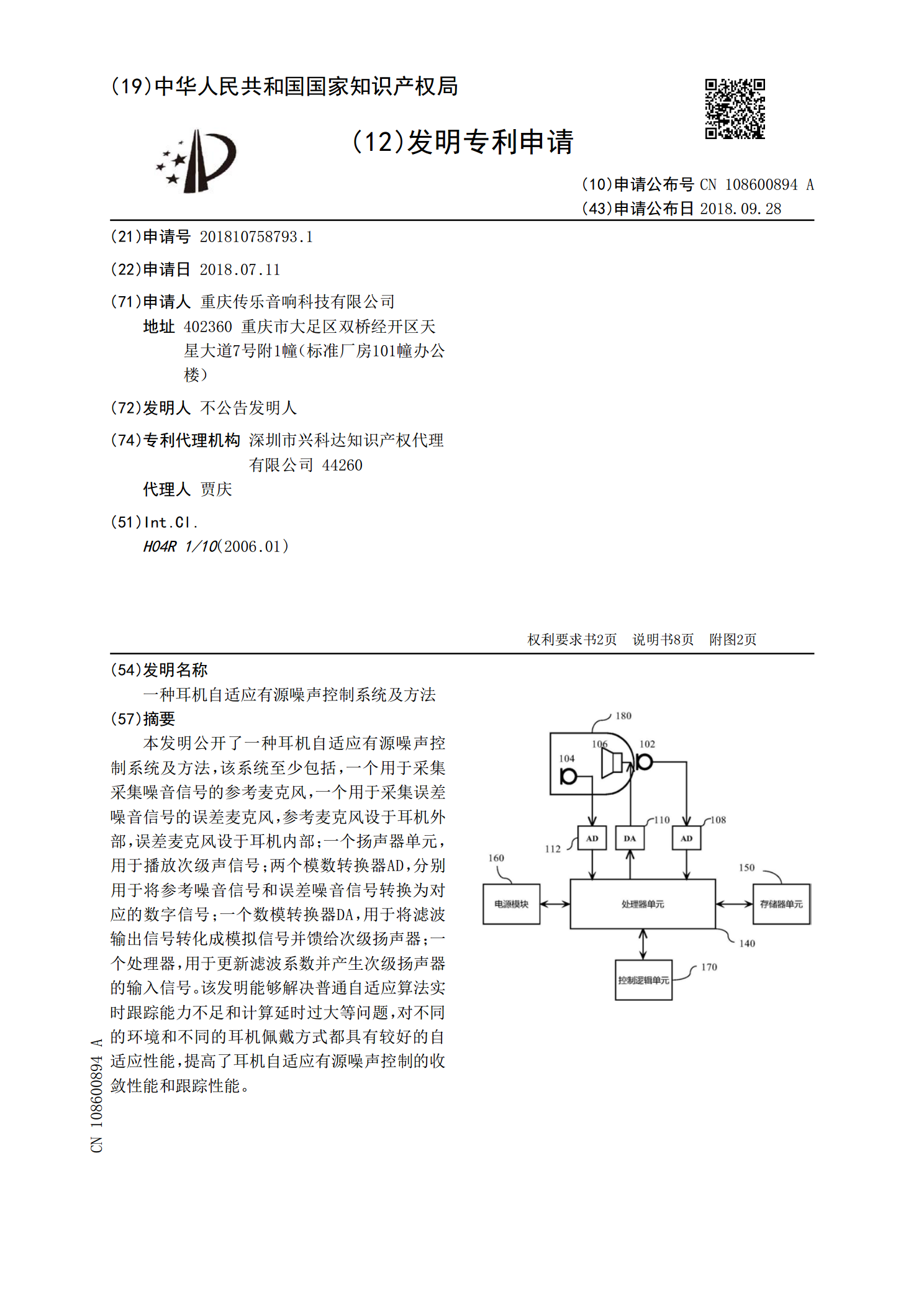
本申请实施例提供一种耳机噪声处理方法、装置及耳机,以根据用户需求实现用户想要达到的效果。耳机具备ANC功能、HT功能或AH功能中至少两个功能,耳机包括第一麦克风和第二麦克风,第一麦克风用于采集第一信号,第一信号用于表征当前外部环境的声音,第二麦克风用于采集第二信号,第二信号用于表征佩戴耳机的用户耳道内部环境的声音。耳机可以为左耳机或者右耳机。左耳机和右耳机采用的处理模式或者模式的处理强度可以相同或者不同。耳机获取目标模式;其中,目标模式可以是基于当前外部环境的场景类型确定的,根据目标模式、第一信号、以及第

频域自适应算法在有源噪声控制系统中的性能研究.docx
频域自适应算法在有源噪声控制系统中的性能研究摘要频域自适应算法是当前有源噪声控制系统中主要的算法之一,具有良好的性能和强大的适应性。本文针对该算法的性能进行了研究和分析,主要从该算法的原理、优点和局限性等方面进行了探讨。研究结果表明,频域自适应算法在有源噪声控制系统中具有较高的控制效果和实用性,但在实际应用中还需进一步完善和优化。关键词:频域自适应,有源噪声控制,性能分析,算法原理1.研究背景有源噪声控制技术是一种通过引入反向信号,减少或抵消环境噪声的技术手段。其中频域自适应算法是一种常用的有源噪声控制算

自适应有源噪声控制系统算法及实验研究的中期报告.docx
自适应有源噪声控制系统算法及实验研究的中期报告该报告主要介绍自适应有源噪声控制(ActiveNoiseControl,ANC)系统算法及其实验研究的中期进展。一、算法部分:(一)、基于LMS算法的ANC系统1、LMS算法原理LMS(LeastMeansSquares)算法是一种重要的自适应滤波算法,其基本思想是将输入和输出信号之间的误差平方最小化,以逐步调整滤波器系数,从而实现系统自适应。LMS算法可以实现对噪声信号的实时响应,并逐步减小噪声的幅度。2、基于LMS算法的ANC系统ANC系统通常由传感器、参

自适应有源噪声控制系统算法及实验研究的任务书.docx
自适应有源噪声控制系统算法及实验研究的任务书任务书一、任务背景与目的在现代社会中,人们面临着各种噪声污染,这些噪声不仅会影响人们的日常生活和工作,还可能会对人体健康造成危害和影响。因此,噪声控制技术越来越受到重视。自适应有源噪声控制是其中一种重要的技术手段。自适应有源噪声控制系统通过使用传感器获取环境中的噪声信号,并实时对其进行处理和控制,从而达到减少噪声污染的目的。该技术通过引入声学反馈原理,将控制信号与噪声信号混合产生反向控制信号,达到消噪的目的。本次任务旨在研究和实现一种自适应有源噪声控制系统算法,