
多数域空间融合的知识图谱嵌入方法、系统、设备及介质.pdf

Ro****44


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多数域空间融合的知识图谱嵌入方法、系统、设备及介质.pdf
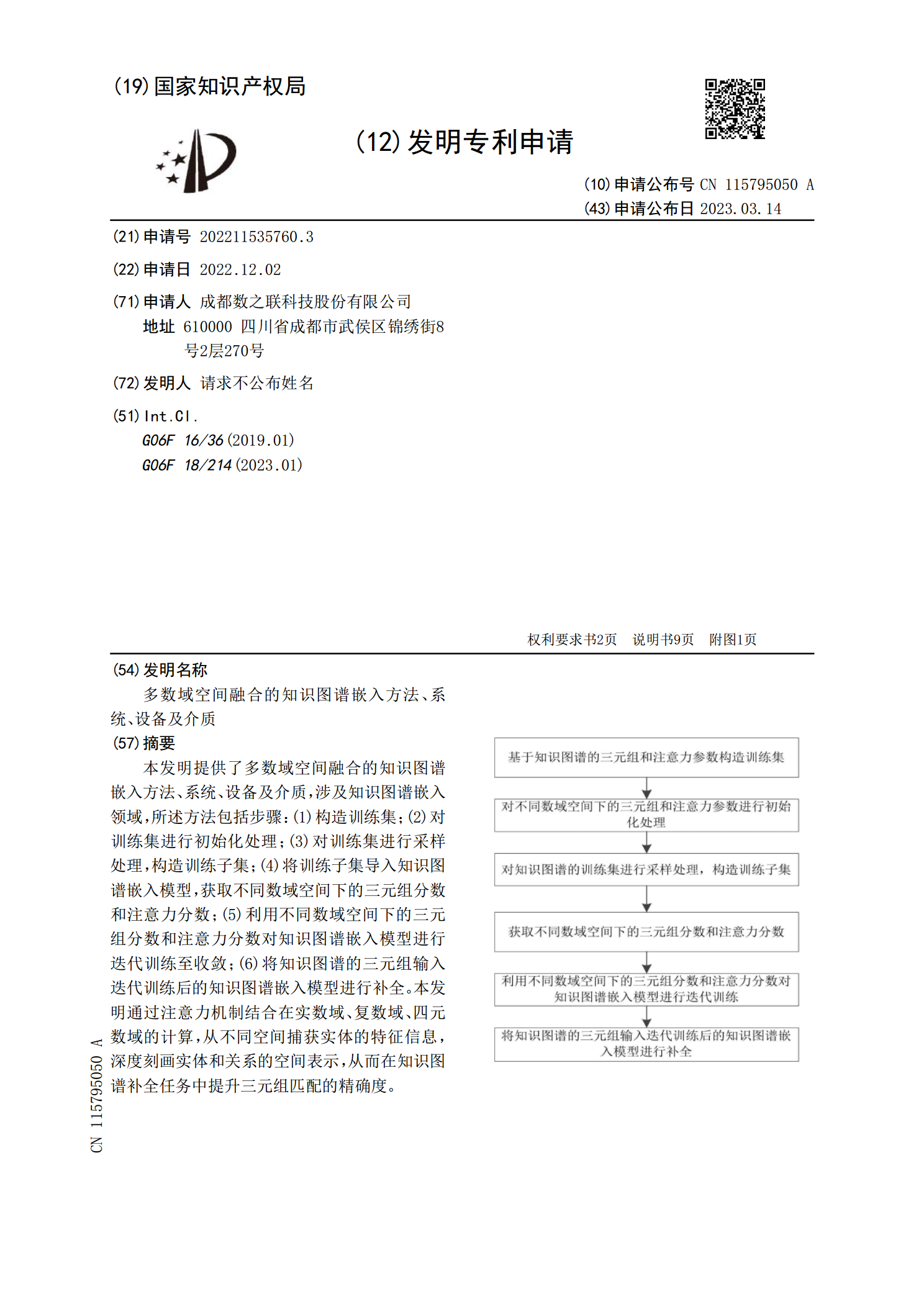
本发明提供了多数域空间融合的知识图谱嵌入方法、系统、设备及介质,涉及知识图谱嵌入领域,所述方法包括步骤:(1)构造训练集;(2)对训练集进行初始化处理;(3)对训练集进行采样处理,构造训练子集;(4)将训练子集导入知识图谱嵌入模型,获取不同数域空间下的三元组分数和注意力分数;(5)利用不同数域空间下的三元组分数和注意力分数对知识图谱嵌入模型进行迭代训练至收敛;(6)将知识图谱的三元组输入迭代训练后的知识图谱嵌入模型进行补全。本发明通过注意力机制结合在实数域、复数域、四元数域的计算,从不同空间捕获实体的特征
一种知识图谱嵌入的链路预测方法、系统、设备及介质.pdf
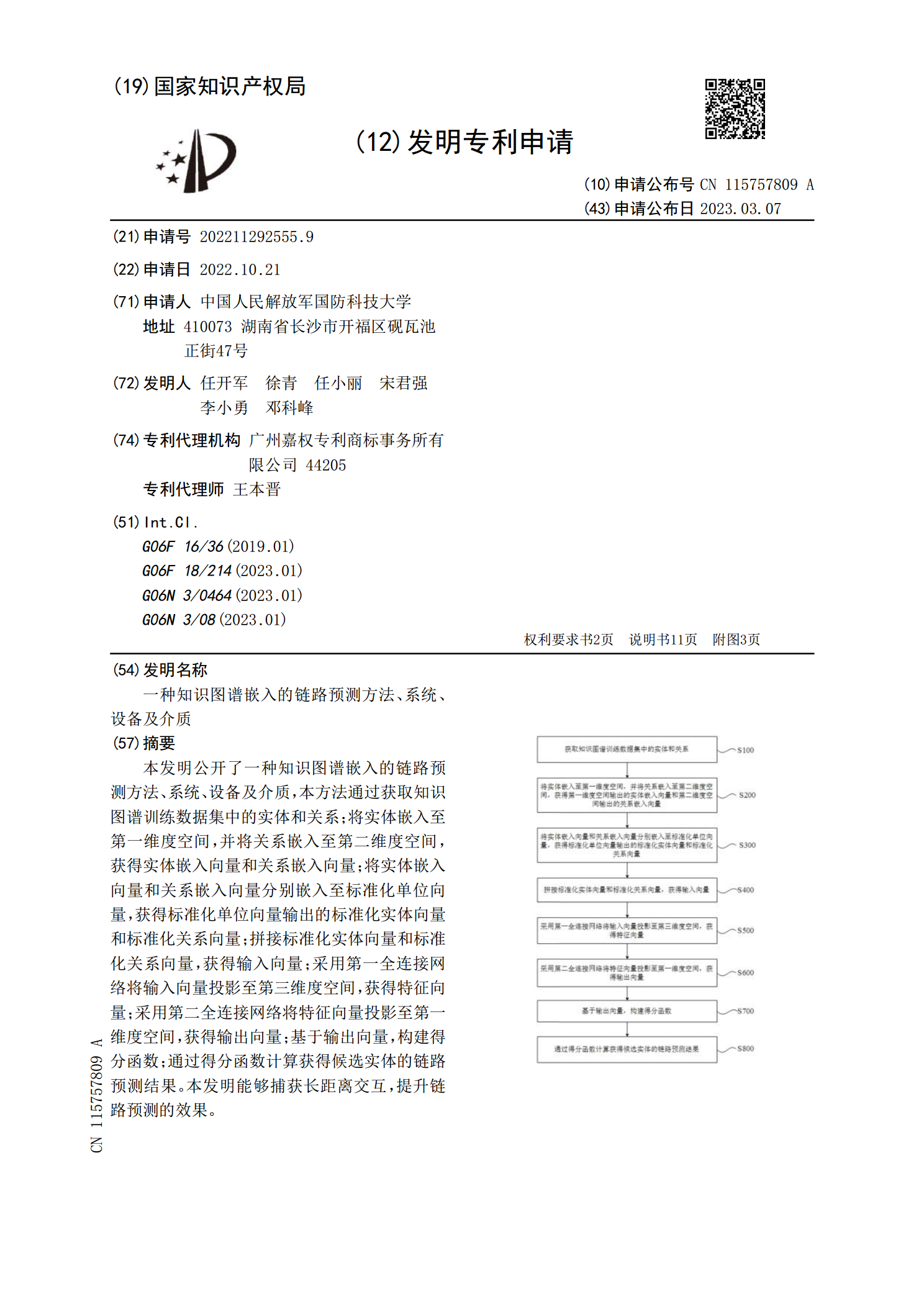
本发明公开了一种知识图谱嵌入的链路预测方法、系统、设备及介质,本方法通过获取知识图谱训练数据集中的实体和关系;将实体嵌入至第一维度空间,并将关系嵌入至第二维度空间,获得实体嵌入向量和关系嵌入向量;将实体嵌入向量和关系嵌入向量分别嵌入至标准化单位向量,获得标准化单位向量输出的标准化实体向量和标准化关系向量;拼接标准化实体向量和标准化关系向量,获得输入向量;采用第一全连接网络将输入向量投影至第三维度空间,获得特征向量;采用第二全连接网络将特征向量投影至第一维度空间,获得输出向量;基于输出向量,构建得分函数;通
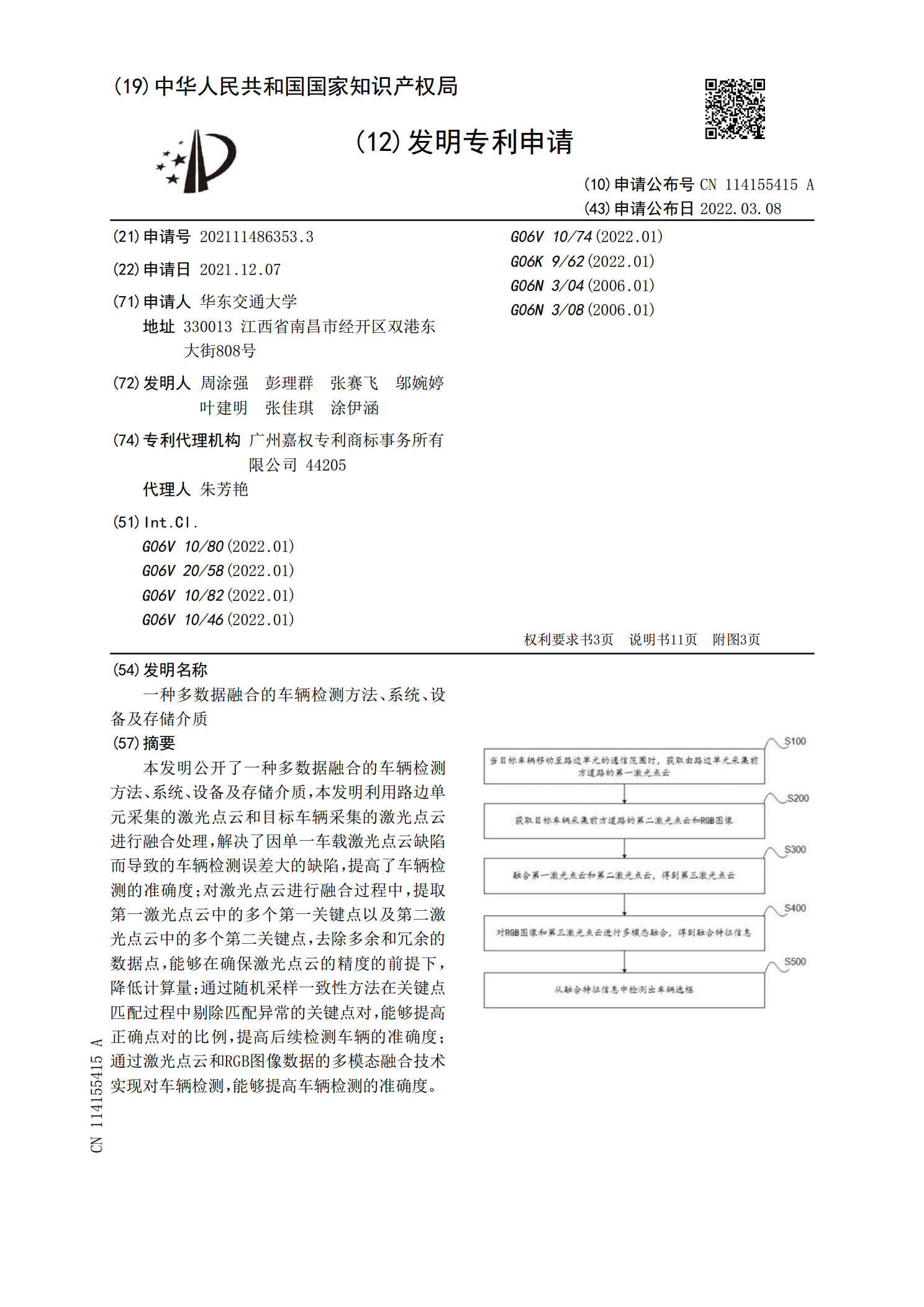
一种多数据融合的车辆检测方法、系统、设备及存储介质.pdf
本发明公开了一种多数据融合的车辆检测方法、系统、设备及存储介质,本发明利用路边单元采集的激光点云和目标车辆采集的激光点云进行融合处理,解决了因单一车载激光点云缺陷而导致的车辆检测误差大的缺陷,提高了车辆检测的准确度;对激光点云进行融合过程中,提取第一激光点云中的多个第一关键点以及第二激光点云中的多个第二关键点,去除多余和冗余的数据点,能够在确保激光点云的精度的前提下,降低计算量;通过随机采样一致性方法在关键点匹配过程中剔除匹配异常的关键点对,能够提高正确点对的比例,提高后续检测车辆的准确度;通过激光点云和

一种在线动态知识图谱嵌入方法、系统及存储介质.pdf
本发明实施例公开了一种在线动态知识图谱嵌入方法、系统及存储介质,该方法基于不同时间粒度的在线动态知识图谱嵌入方法,克服实际动态知识图谱中的时间信息分布不均匀问题;本方法通过在线学习每个时间段知识图谱,在保留绝大部分现有嵌入空间向量表达的前提下,在较少的范围内重新学习嵌入,提高计算效率,节省了计算资源,适合海量异构数据知识的描述;本方法基于马尔可夫假设和贝叶斯条件概率,构建整个动态知识图谱的事件联合概率推断模型,可实现图谱的补全和知识推理,挖掘隐含知识。
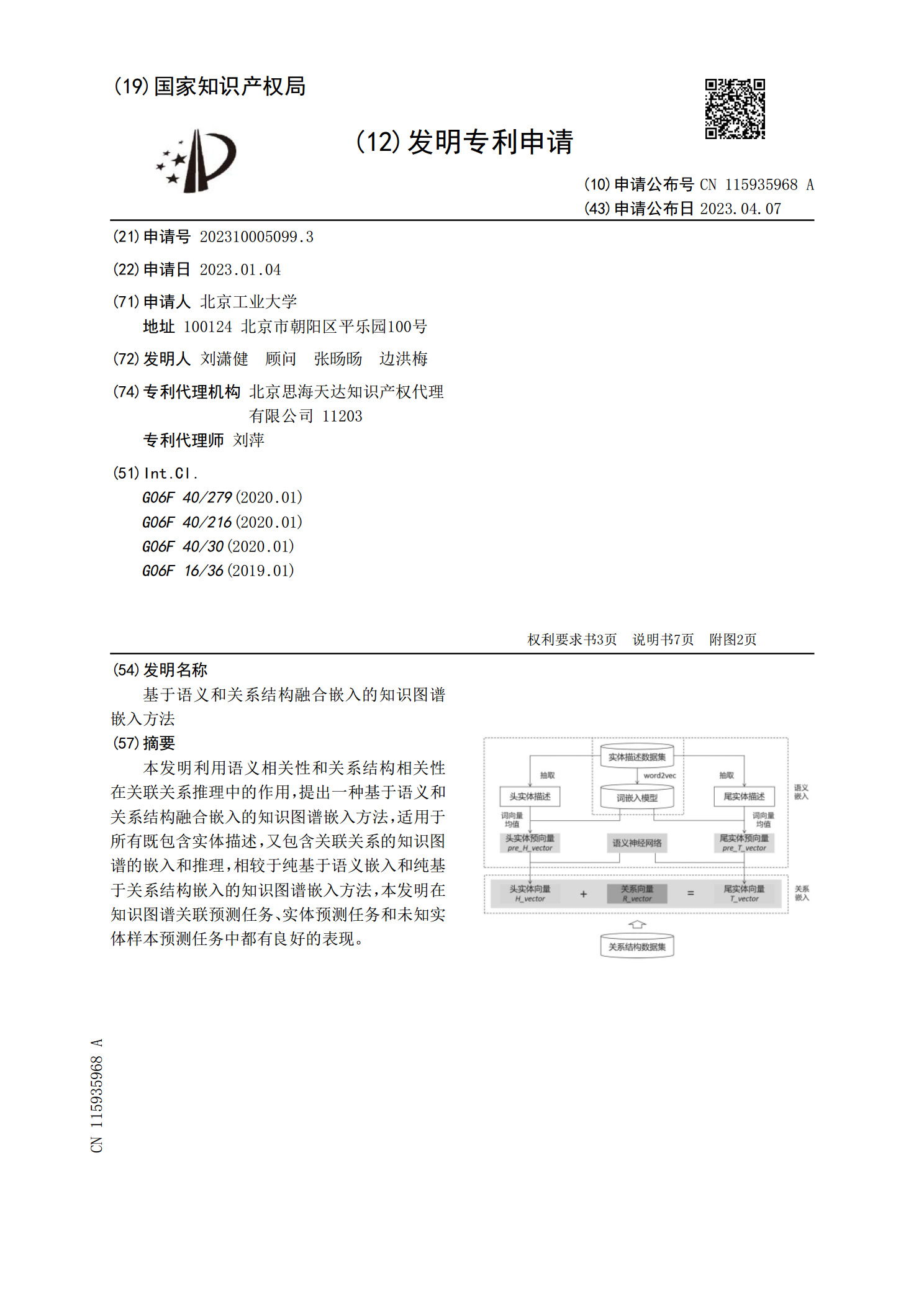
基于语义和关系结构融合嵌入的知识图谱嵌入方法.pdf
本发明利用语义相关性和关系结构相关性在关联关系推理中的作用,提出一种基于语义和关系结构融合嵌入的知识图谱嵌入方法,适用于所有既包含实体描述,又包含关联关系的知识图谱的嵌入和推理,相较于纯基于语义嵌入和纯基于关系结构嵌入的知识图谱嵌入方法,本发明在知识图谱关联预测任务、实体预测任务和未知实体样本预测任务中都有良好的表现。