
一种网络拒止环境下多飞艇协同控制方法及其系统.pdf

是飞****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种网络拒止环境下多飞艇协同控制方法及其系统.pdf
本发明公开了一种网络拒止环境下多飞艇协同控制方法,步骤如下:建立多飞艇系统模型和通信拓扑模型;根据多飞艇系统模型建立分布式扩张状态观测器并用于获得每个飞艇内部状态及外部不确定性扰动的估计值;利用分布式扩张状态观测器构造多飞艇协同控制器;验证多飞艇系统协同控制的有效性。同时公开了基于上述方法的系统,采用上述一种网络拒止环境下多飞艇协同控制方法及其系统,根据分布式扩张状态观测器,每个飞艇获得系统内部状态及外部不确定性扰动的估计值,通过多飞艇协同控制器可对网络拒止环境下多飞艇系统进行协同控制,使在网络拒止环境下
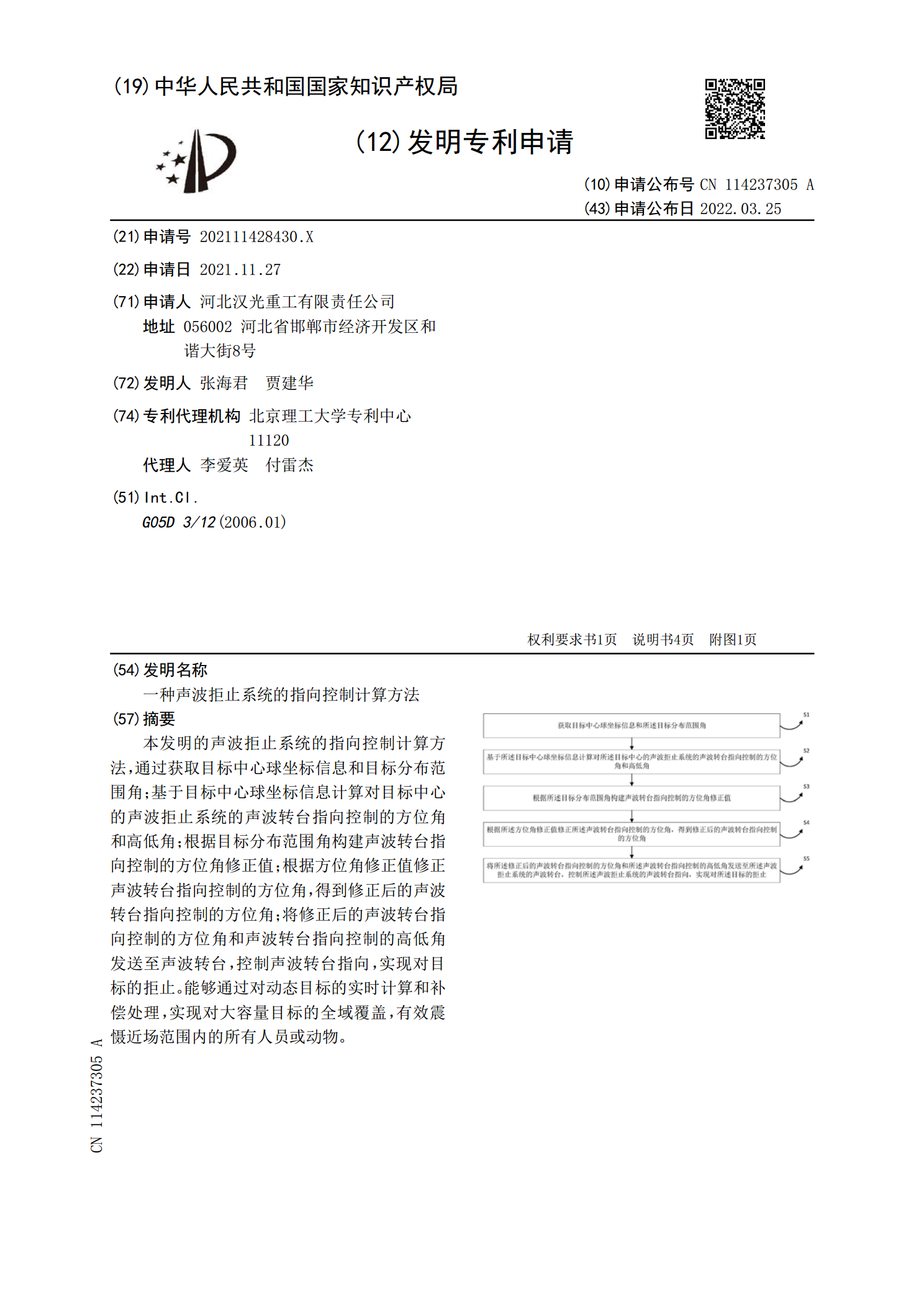
一种声波拒止系统的指向控制计算方法.pdf
本发明的声波拒止系统的指向控制计算方法,通过获取目标中心球坐标信息和目标分布范围角;基于目标中心球坐标信息计算对目标中心的声波拒止系统的声波转台指向控制的方位角和高低角;根据目标分布范围角构建声波转台指向控制的方位角修正值;根据方位角修正值修正声波转台指向控制的方位角,得到修正后的声波转台指向控制的方位角;将修正后的声波转台指向控制的方位角和声波转台指向控制的高低角发送至声波转台,控制声波转台指向,实现对目标的拒止。能够通过对动态目标的实时计算和补偿处理,实现对大容量目标的全域覆盖,有效震慑近场范围内的所

GPS拒止及复杂电磁条件下多机器人编队控制方法.pdf
本发明提出一种GPS拒止及复杂电磁条件下多机器人编队控制方法包括以下步骤;步骤1,建立一般多机器人系统模型;步骤2,在真实环境中对多机器人编队系统状态向量模型进行调整,生成含多种时延多机器人系统;步骤3,确定机器人之间通信的最大时延及所处噪声环境的最大幅值,并再以此设计位置比例系数和速度比例系数。本发明解决了在多种时延和噪声条件下二阶多机器人系统的一致性问题,通过频域分析法将系统特征方程转化为纯虚数特征根的二次多项式,然后再求解,最终得到其临界稳定状态。
GPS拒止环境下基于定位置信度的多无人机协同定位方法.pptx
汇报人:目录PARTONEPARTTWO无人机协同定位的背景和意义基于定位置信度的协同定位方法原理无人机协同定位的应用场景PARTTHREE定位置信度的概念和计算方法定位置信度在协同定位中的重要性基于定位置信度的协同定位算法流程PARTFOURGPS拒止环境对无人机定位的影响基于定位置信度的协同定位算法在GPS拒止环境下的适用性算法实现的关键技术问题及解决方案PARTFIVE与传统定位方法的比较算法的优势和局限性分析在实际应用中的适用性和限制条件PARTSIX算法的改进方向和未来发展趋势在军事、救援等领域

一种拒止环境下无人机蜂群自组织方法.pdf
本发明涉及一种拒止环境下无人机蜂群自组织方法,包括:构建无人机环境感知系统,基于所述无人机环境感知系统,获取相邻无人机个体的位置信息,建立无人机蜂群无中心控制关系模型;通过所述无人机蜂群无中心控制关系模型,分析集群任务过程及任务特点,建立任务规划数学模型,生成任务计划,基于所述任务计划进行集群协同控制,最后进行效能评估。本发明为无人机设计了统一的态势模型,解决了传统方法中,不同传感器数据处理存在的处理复杂度高,信息融合速度慢,难以收敛等问题。