
一种基于力位混合控制的装配装置.pdf

俊凤****bb


1/5
2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于力位混合控制的装配装置.pdf
本实用新型公开了一种基于力位混合控制的装配装置,包括:底座(1)、机械臂(2)、机械抓手(4)、压力传感器(3)和控制器;所述机械臂(2)固定于底座(1)上,机械臂(2)端部连接有机械抓手(4);所述机械抓手(4)上连接压力传感器(3),监测部件之间的接触力;所述控制器接收来自压力传感器(3)的数据,监测装配过程中力的变化,并进行调试。本实用新型的有益效果:使用机械手压力传感器的装配装置,通过机械臂、机械抓手和压力传感器的配合,能够通过压力控制对产品进行组装,可有效控制装配力度,提升装配质量和装配效率。

基于力位混合控制的工业机器人精密轴孔装配.docx
基于力位混合控制的工业机器人精密轴孔装配摘要:随着工业机器人在工业应用领域中的广泛应用,对其精确控制和定位能力的要求也越来越高。轴孔装配是工业生产中广泛应用的一种装配技术,因其装配精度直接影响着产品的质量和性能,所以其装配过程必须具备高精度的控制定位能力。本文基于力位混合控制,研究了工业机器人在轴孔装配过程中的精确定位控制问题,并对其控制精度进行了实验验证。关键词:工业机器人;轴孔装配;力位混合控制;精密定位Abstract:Withthewidespreadapplicationofindustrial
一种基于力位混合技术的毛刺去除机器控制传输系统.pdf
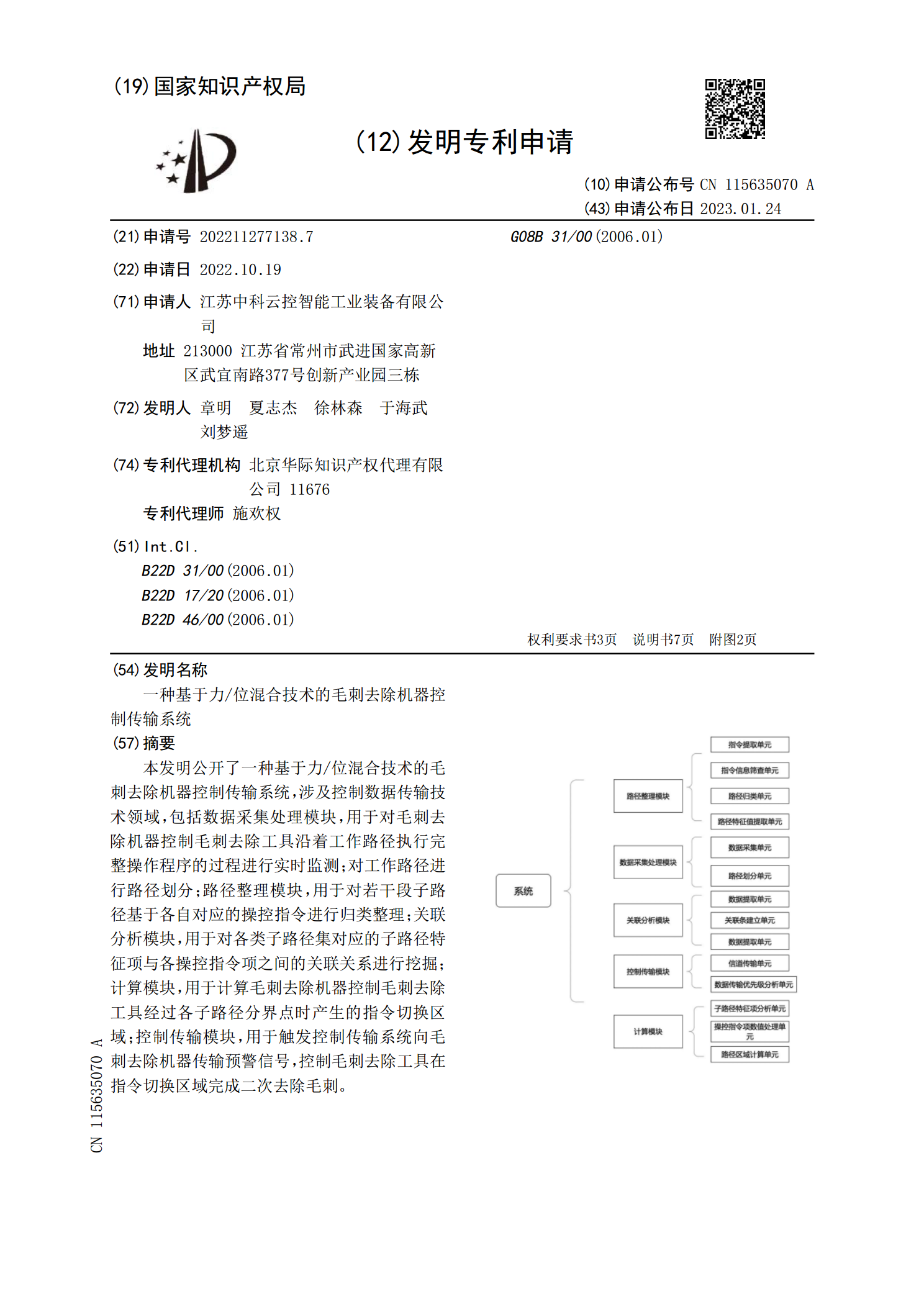
本发明公开了一种基于力/位混合技术的毛刺去除机器控制传输系统,涉及控制数据传输技术领域,包括数据采集处理模块,用于对毛刺去除机器控制毛刺去除工具沿着工作路径执行完整操作程序的过程进行实时监测;对工作路径进行路径划分;路径整理模块,用于对若干段子路径基于各自对应的操控指令进行归类整理;关联分析模块,用于对各类子路径集对应的子路径特征项与各操控指令项之间的关联关系进行挖掘;计算模块,用于计算毛刺去除机器控制毛刺去除工具经过各子路径分界点时产生的指令切换区域;控制传输模块,用于触发控制传输系统向毛刺去除机器传输
一种基于混合视觉的多平面螺栓装配装置.pdf
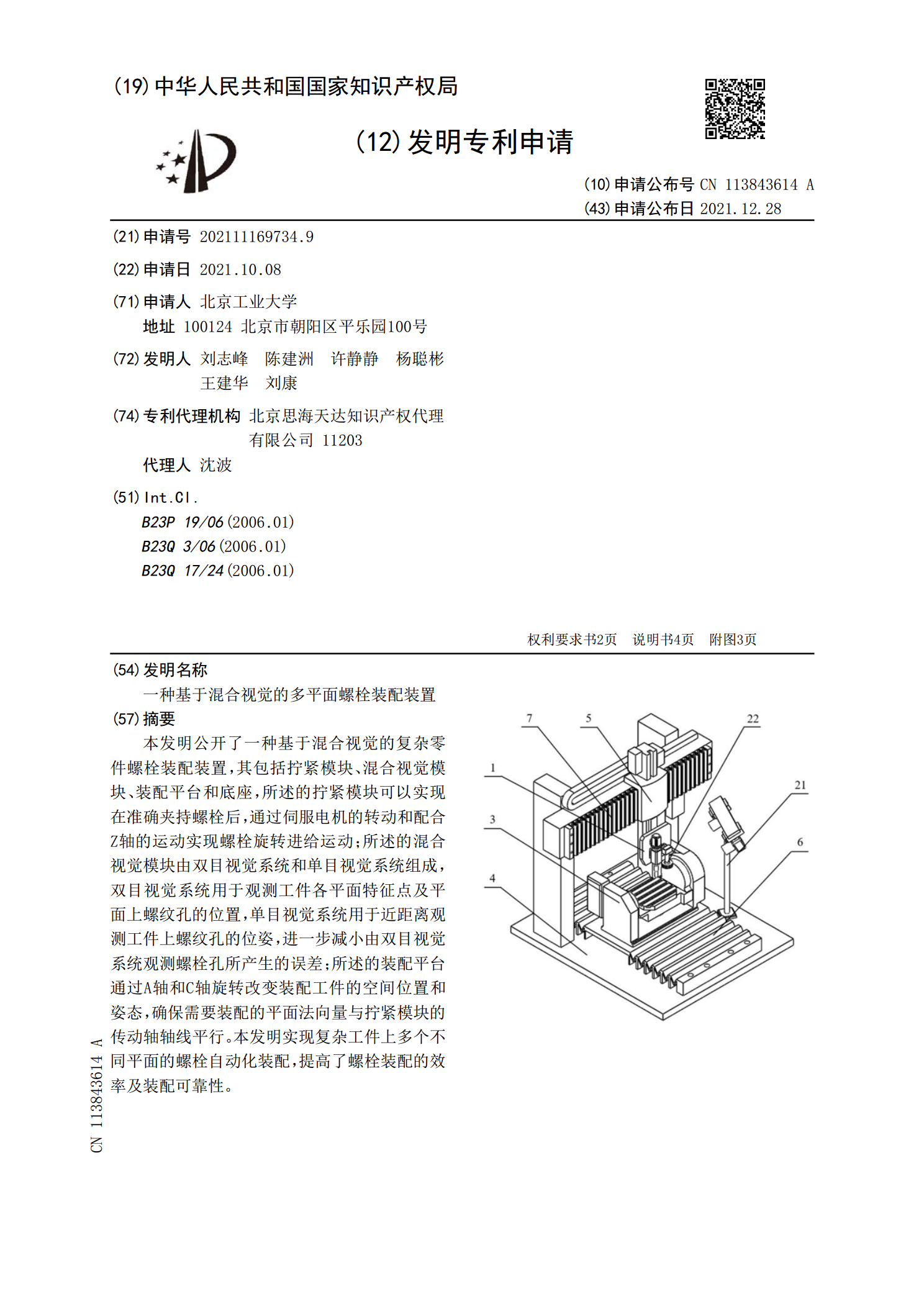
本发明公开了一种基于混合视觉的复杂零件螺栓装配装置,其包括拧紧模块、混合视觉模块、装配平台和底座,所述的拧紧模块可以实现在准确夹持螺栓后,通过伺服电机的转动和配合Z轴的运动实现螺栓旋转进给运动;所述的混合视觉模块由双目视觉系统和单目视觉系统组成,双目视觉系统用于观测工件各平面特征点及平面上螺纹孔的位置,单目视觉系统用于近距离观测工件上螺纹孔的位姿,进一步减小由双目视觉系统观测螺栓孔所产生的误差;所述的装配平台通过A轴和C轴旋转改变装配工件的空间位置和姿态,确保需要装配的平面法向量与拧紧模块的传动轴轴线平行

一种混合机罐内液位控制装置.pdf
本发明提供一种混合机罐内液位控制装置,包括接触开关,所述接触开关通过螺栓固定在活动板下端,所述活动板上端中间位置通过轴承安装调节丝杆,所述调节丝杆环形侧面通过螺纹啮合安装柱,所述调节丝杆环形侧面通过轴承安装活动环,所述活动环左端固定移动指示板,所述移动指示板后端固定U形架,所述移动指示板后端贴合标注尺,所述安装柱下端固定带孔圆筒,所述带孔圆筒下端固定安装环,所述安装环通过螺纹啮合在套筒环形侧面上,所述接触开关下方安装浮球,该设计利用套筒与安装环实现快速拆装,便于更换浮球,方便维护,也实现调整接触开关上下位