
一种犁深控制方法、系统及拖拉机.pdf

含秀****66


1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种犁深控制方法、系统及拖拉机.pdf
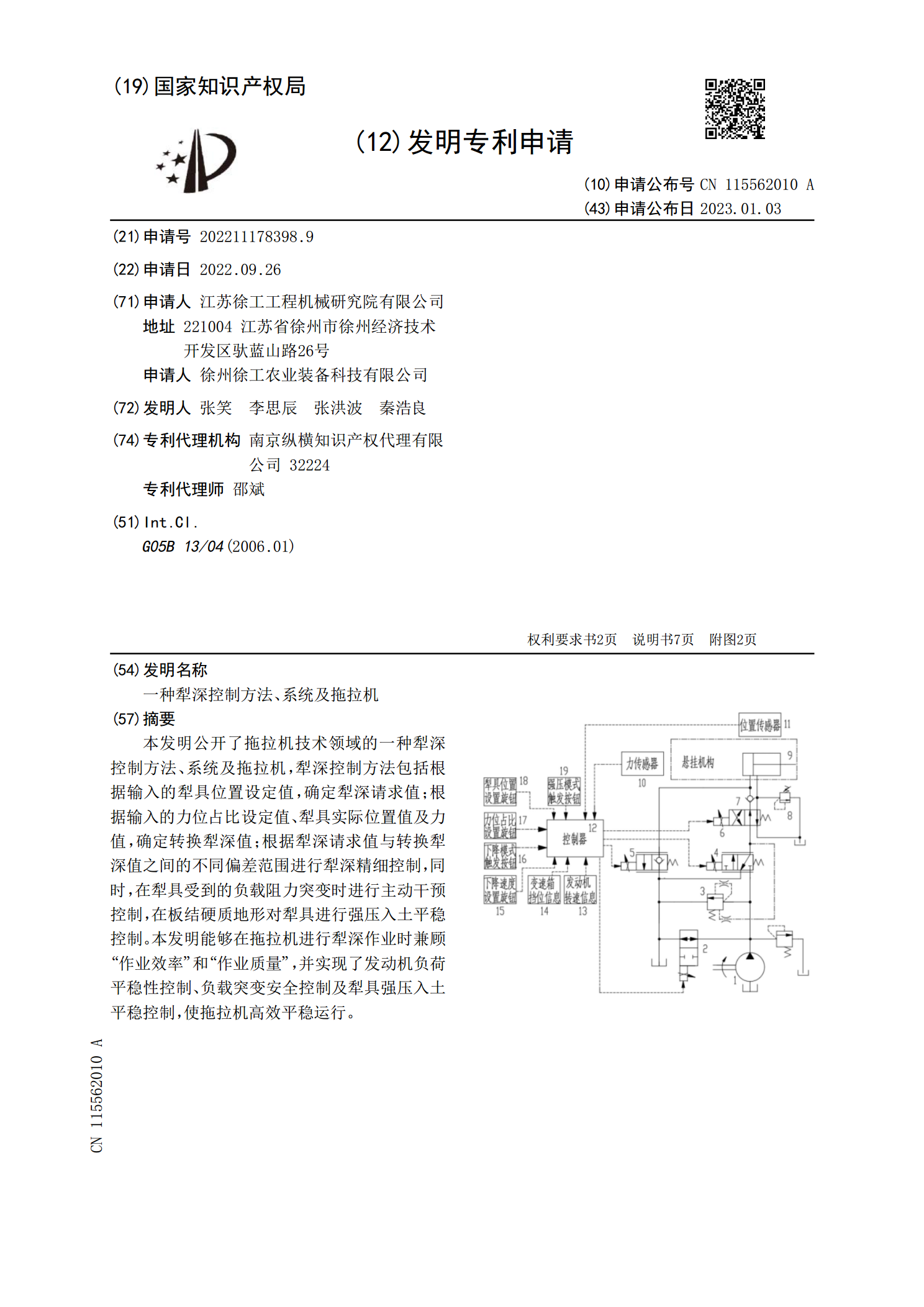
本发明公开了拖拉机技术领域的一种犁深控制方法、系统及拖拉机,犁深控制方法包括根据输入的犁具位置设定值,确定犁深请求值;根据输入的力位占比设定值、犁具实际位置值及力值,确定转换犁深值;根据犁深请求值与转换犁深值之间的不同偏差范围进行犁深精细控制,同时,在犁具受到的负载阻力突变时进行主动干预控制,在板结硬质地形对犁具进行强压入土平稳控制。本发明能够在拖拉机进行犁深作业时兼顾“作业效率”和“作业质量”,并实现了发动机负荷平稳性控制、负载突变安全控制及犁具强压入土平稳控制,使拖拉机高效平稳运行。
一种翻转犁犁深测量系统及方法.pdf
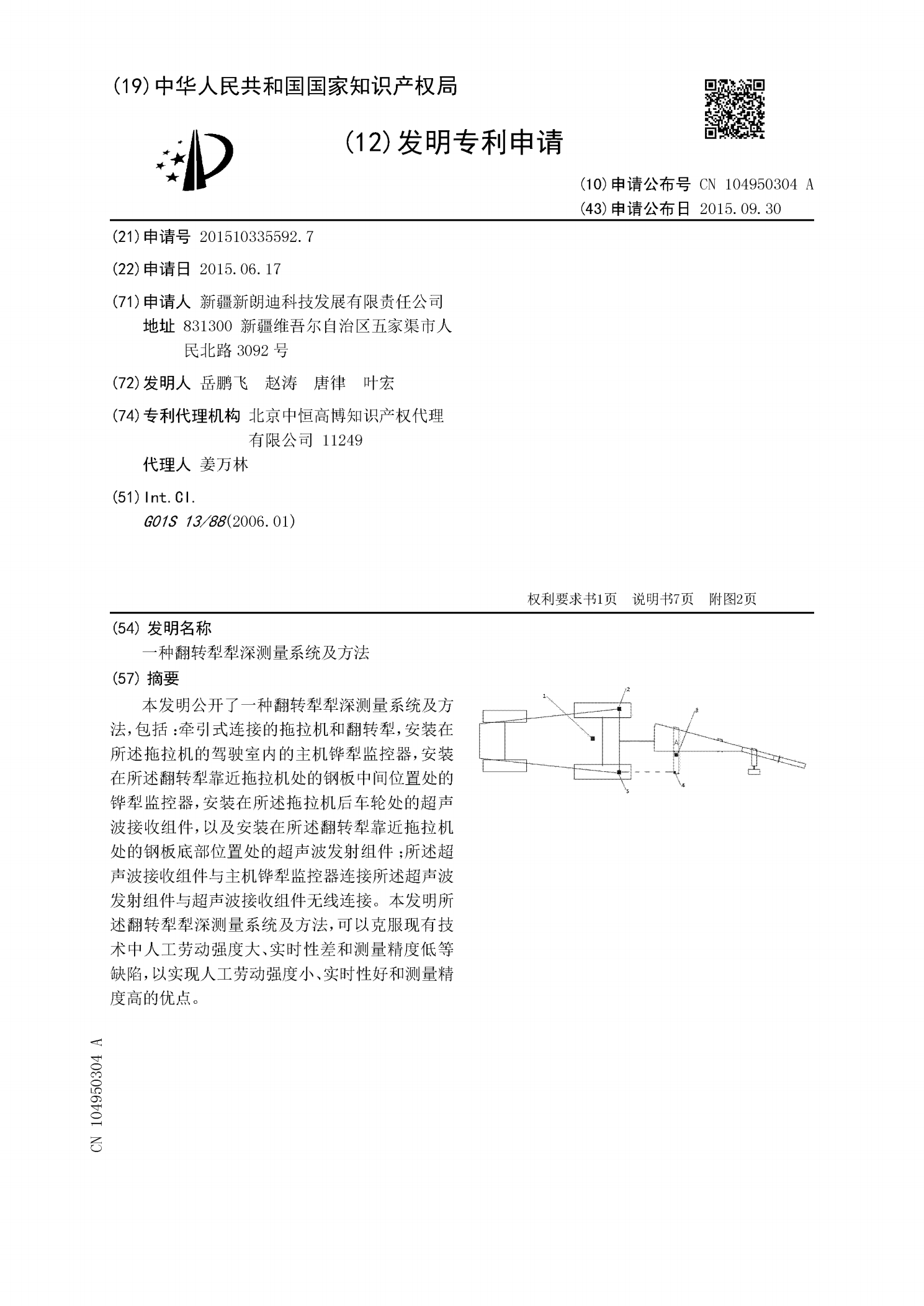
本发明公开了一种翻转犁犁深测量系统及方法,包括:牵引式连接的拖拉机和翻转犁,安装在所述拖拉机的驾驶室内的主机铧犁监控器,安装在所述翻转犁靠近拖拉机处的钢板中间位置处的铧犁监控器,安装在所述拖拉机后车轮处的超声波接收组件,以及安装在所述翻转犁靠近拖拉机处的钢板底部位置处的超声波发射组件;所述超声波接收组件与主机铧犁监控器连接所述超声波发射组件与超声波接收组件无线连接。本发明所述翻转犁犁深测量系统及方法,可以克服现有技术中人工劳动强度大、实时性差和测量精度低等缺陷,以实现人工劳动强度小、实时性好和测量精度高的

一种拖拉机犁轮.pdf
本发明公开了一种辗轧面窄不易影响出苗的手扶拖拉机犁轮。本发明由轮圈、辐条、轮齿和连轴盘组成,辐条呈放射状均布在轮圈与连轴盘之间,辐条两端分别与轮圈和连轴盘焊接为一体,轮圈外缘上均布有轮齿,连轴盘中心设有轴孔,以轴孔为圆心均布有螺孔。由于本发明采用轮齿着地的结构,而且轮齿是间隔分布,轮齿的着地面又小,因此,不易辗压秧苗。
一种小型拖拉机用犁具.pdf
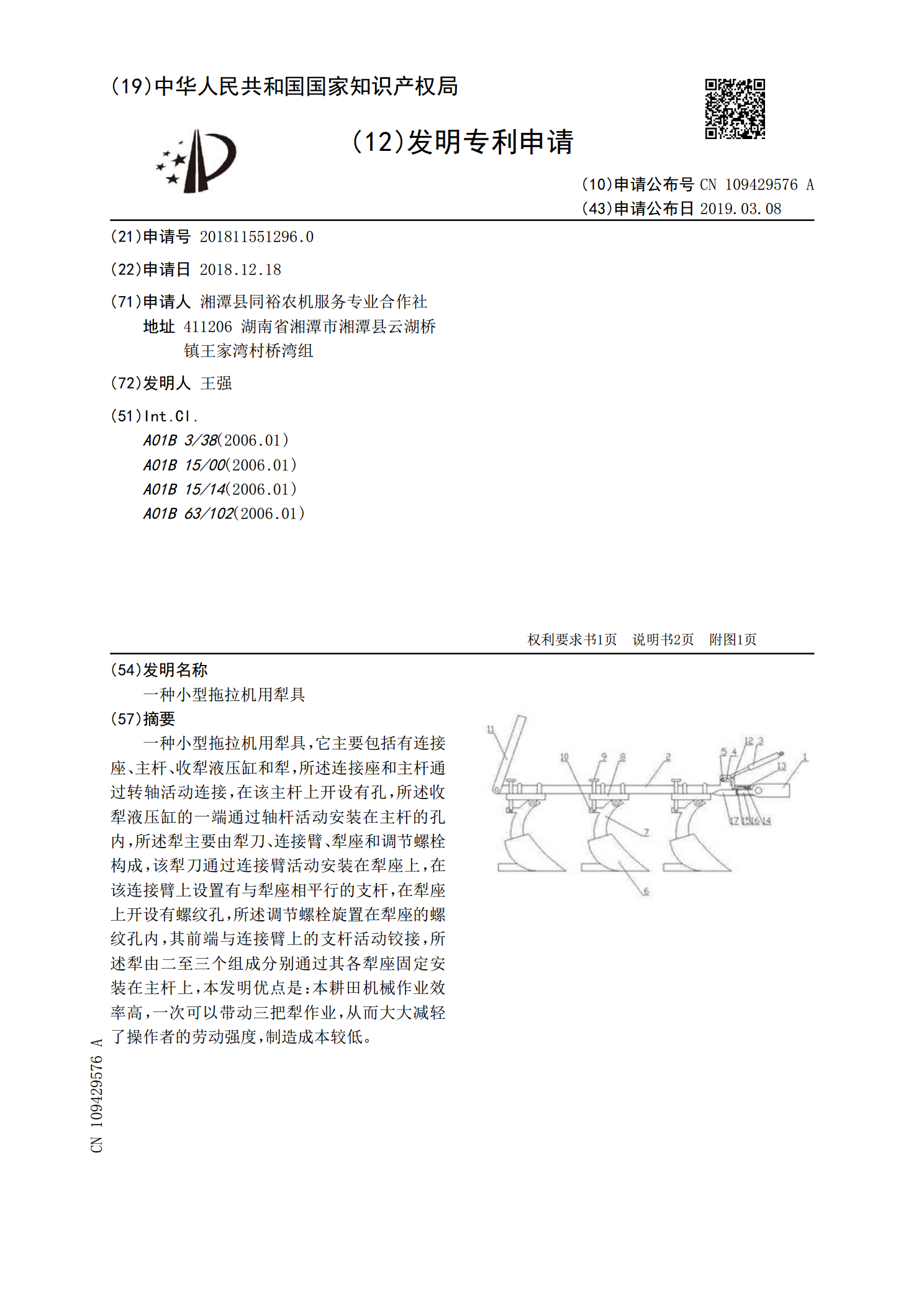
一种小型拖拉机用犁具,它主要包括有连接座、主杆、收犁液压缸和犁,所述连接座和主杆通过转轴活动连接,在该主杆上开设有孔,所述收犁液压缸的一端通过轴杆活动安装在主杆的孔内,所述犁主要由犁刀、连接臂、犁座和调节螺栓构成,该犁刀通过连接臂活动安装在犁座上,在该连接臂上设置有与犁座相平行的支杆,在犁座上开设有螺纹孔,所述调节螺栓旋置在犁座的螺纹孔内,其前端与连接臂上的支杆活动铰接,所述犁由二至三个组成分别通过其各犁座固定安装在主杆上,本发明优点是:本耕田机械作业效率高,一次可以带动三把犁作业,从而大大减轻了操作者的

一种小型拖拉机用犁具.pdf
本发明公开了一种小型拖拉机用犁具,它主要包括有连接座、主杆、收犁液压缸和犁,所述连接座和主杆通过转轴活动连接,在该主杆上开设有孔,所述收犁液压缸的一端通过轴杆活动安装在主杆的孔内,所述犁主要由犁刀、连接臂、犁座和调节螺栓构成,该犁刀通过连接臂活动安装在犁座上,在该连接臂上设置有与犁座相平行的支杆,在犁座上开设有螺纹孔,所述调节螺栓旋置在犁座的螺纹孔内,其前端与连接臂上的支杆活动铰接,所述犁由二至三个组成分别通过其各犁座固定安装在主杆上,本发明优点是:本耕田机械作业效率高,一次可以带动三把犁作业,从而大大减