
一种全偏振光谱成像装置及探测方法.pdf

增梅****主啊

1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全偏振光谱成像装置及探测方法.pdf
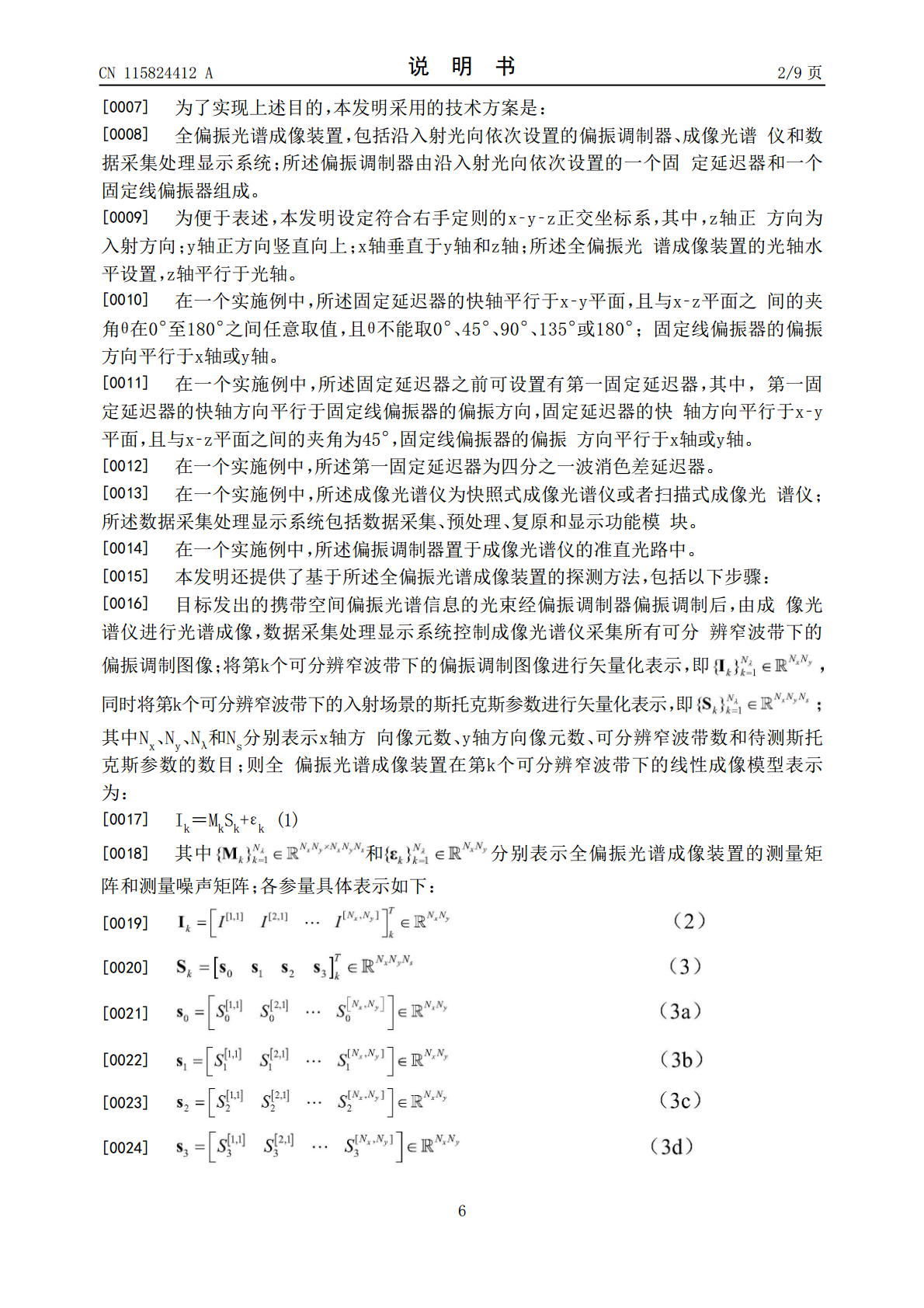
本发明公开了一种全偏振光谱成像装置及探测方法,包含沿入射光向依次设置的偏振调制器、成像光谱仪、数据采集处理显示系统;偏振调制器是延入射光线依此设置的单个固定延迟器和单个固定线偏振器,可以对全斯托克斯参数进行光谱调制,结构上具有简单、超紧凑、微型化、抗系统误差的优越性。通过构建完备的成像物理模型或构建基于压缩感知的成像物理模型,再利用未训练人工神经网络实现每一个窄波带下的全斯托克斯参数图像重建,为“黑箱操作”的深度神经网络赋予了物理意义。重建的偏振光谱分辨率可保持与所用成像光谱仪的分辨率一致;且具有抗噪声能

一种全偏振高光谱干涉成像装置及方法.pdf
本发明公开了一种全偏振高光谱干涉成像装置及方法,利用电控双折射器件进行偏振相位调制,并通过偏振分光器获得的双光路进行像素配准图像的采集,并进行高光谱和全偏振信息的解算。目标地物的散射光由前置光学系统收集并由偏振相位调制器进行偏振相位调制后,在偏振分光棱镜对光进行分路,分为O光和E光两路,在保证图像配准的条件下进行干涉成像与同步测量,并将得到的一系列图像信息送入系统处理;本发明不仅保留了高的光通量和高光谱获取的技术特征,还实现的全偏振遥感测量;获得的全偏振高光谱遥感成像信息能够进一步的提高目标地物的空间分辨
一种偏振光散射光谱成像内窥装置与探测方法.pdf
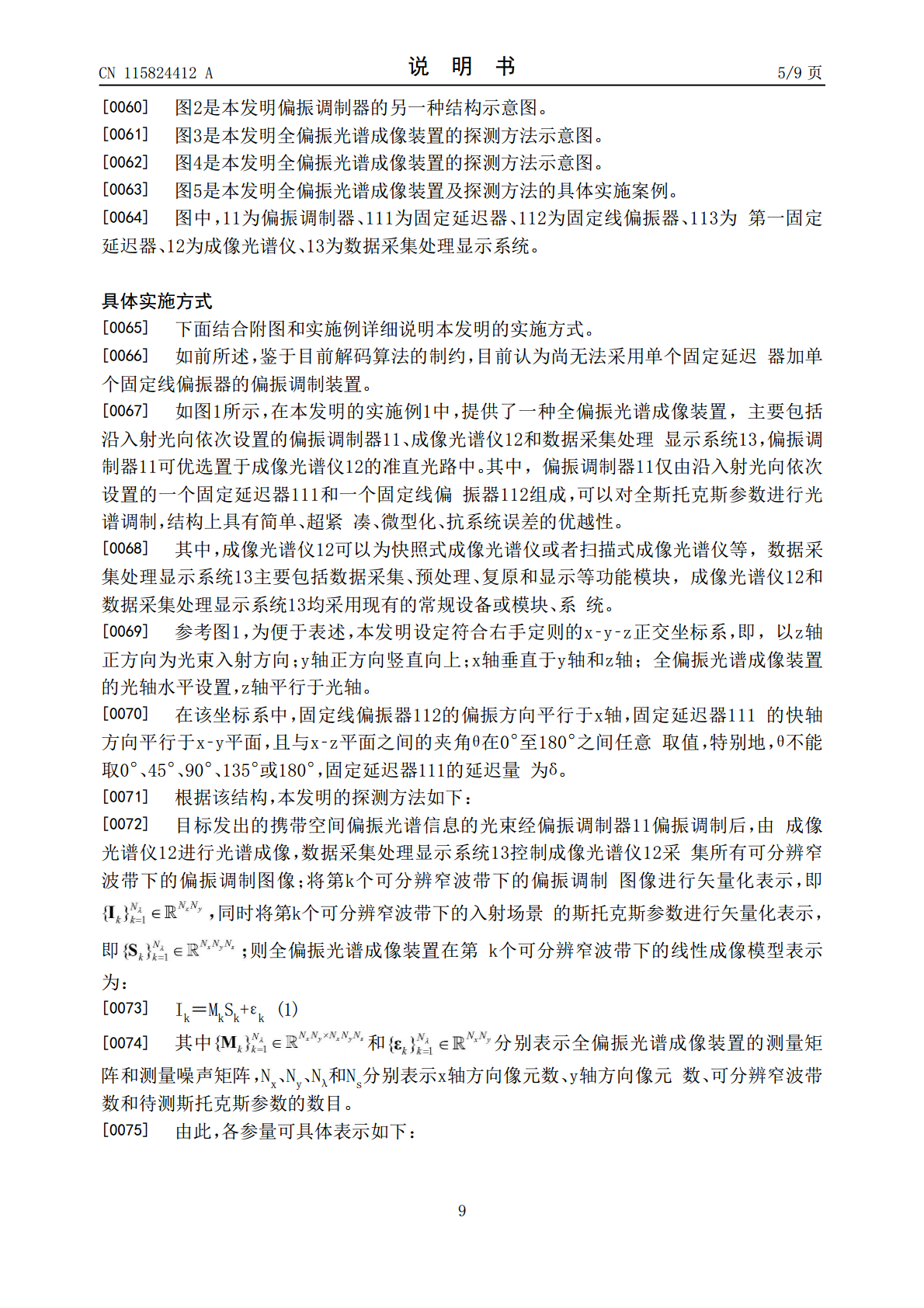
本发明偏振光散射光谱成像内窥装置,包括线偏振光产生模块、偏振调制模块和光谱采集处理显示系统;所述偏振调制模块包括消色差四分之一波片、延迟器和线偏振片;线偏振光产生模块用于提供照射探测目标的线偏振光;所述线偏振光在所述探测目标散射,产生后向散射光;后向散射光依次经消色差四分之一波片、延迟器和线偏振片,完成偏振调制;光谱采集处理显示系统对完成偏振调制的光线进行光谱成像并解调;本发明可解决内窥镜活检通道的空间利用率不高的问题,并在此基础上进一步解决PLSS探头成像效率不高的问题,适用于探测消化道早癌信息,并在口

一种离轴三反全谱段偏振光谱成像探测装置.pdf
本发明一种离轴三反全谱段偏振光谱成像探测装置,属于光电探测领域,一种离轴三反全谱段偏振光谱成像探测装置包括离轴三反光学系统、多谱段分光片、长波偏振光谱成像探测系统、中波偏振光谱成像探测系统、近红外偏振光谱成像探测系统、可见光偏振光谱成像探测系统、图像融合处理系统。本发明将强度成像、光谱成像、偏振成像技术相结合,提出了一种离轴三反全谱段偏振光谱成像探测装置,实现雾霾天气下高清晰高分辨光电成像探测。同时获取可见光、近红外、中波红外、长波红外四个谱段的偏振、光谱、强度信息,是传统成像探测的有益补充。将强度、光谱
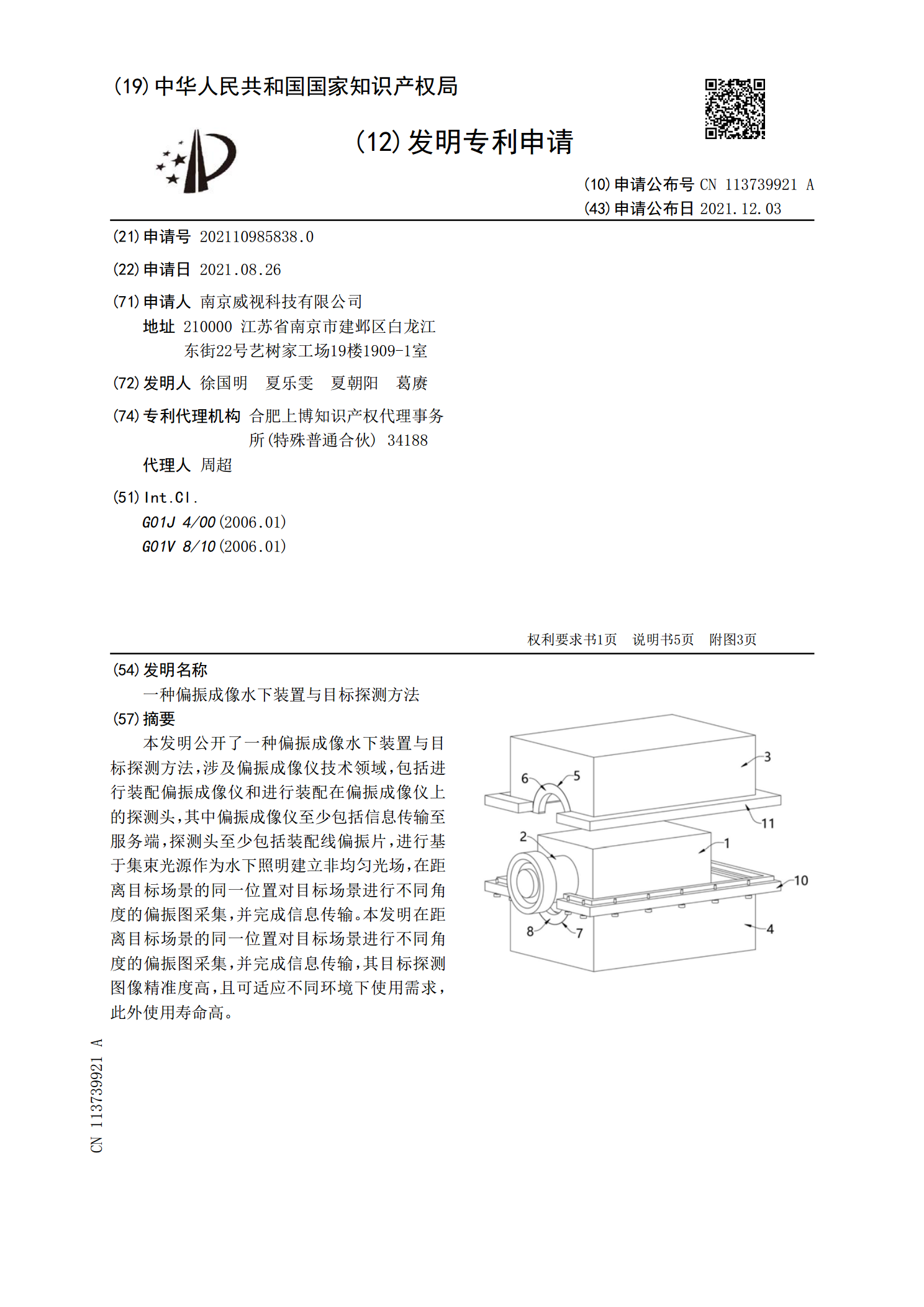
一种偏振成像水下装置与目标探测方法.pdf
本发明公开了一种偏振成像水下装置与目标探测方法,涉及偏振成像仪技术领域,包括进行装配偏振成像仪和进行装配在偏振成像仪上的探测头,其中偏振成像仪至少包括信息传输至服务端,探测头至少包括装配线偏振片,进行基于集束光源作为水下照明建立非均匀光场,在距离目标场景的同一位置对目标场景进行不同角度的偏振图采集,并完成信息传输。本发明在距离目标场景的同一位置对目标场景进行不同角度的偏振图采集,并完成信息传输,其目标探测图像精准度高,且可适应不同环境下使用需求,此外使用寿命高。