
一种基于时空解构的多传感器长时序列预测方法及模型.pdf

努力****幻翠

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于时空解构的多传感器长时序列预测方法及模型.pdf
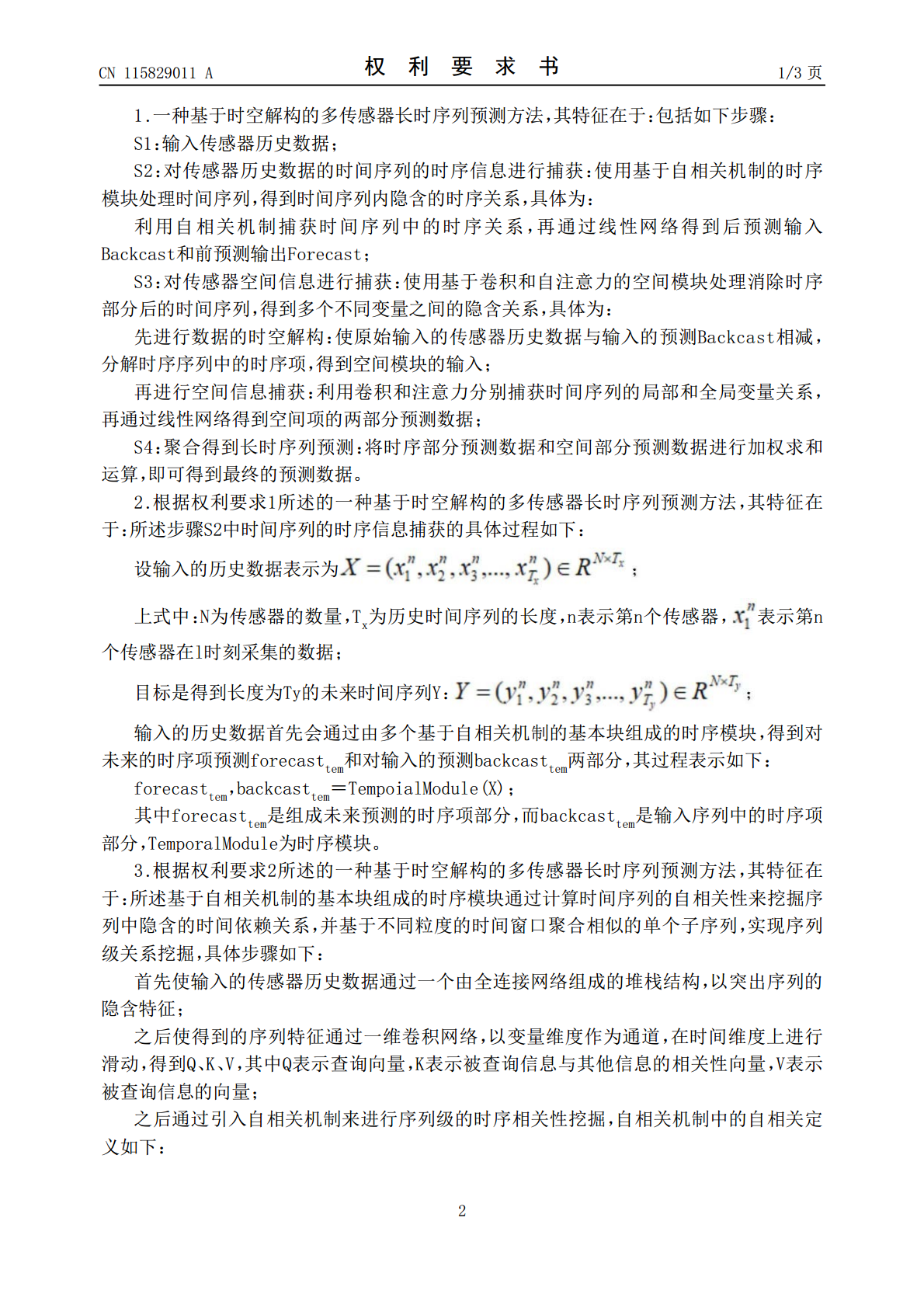
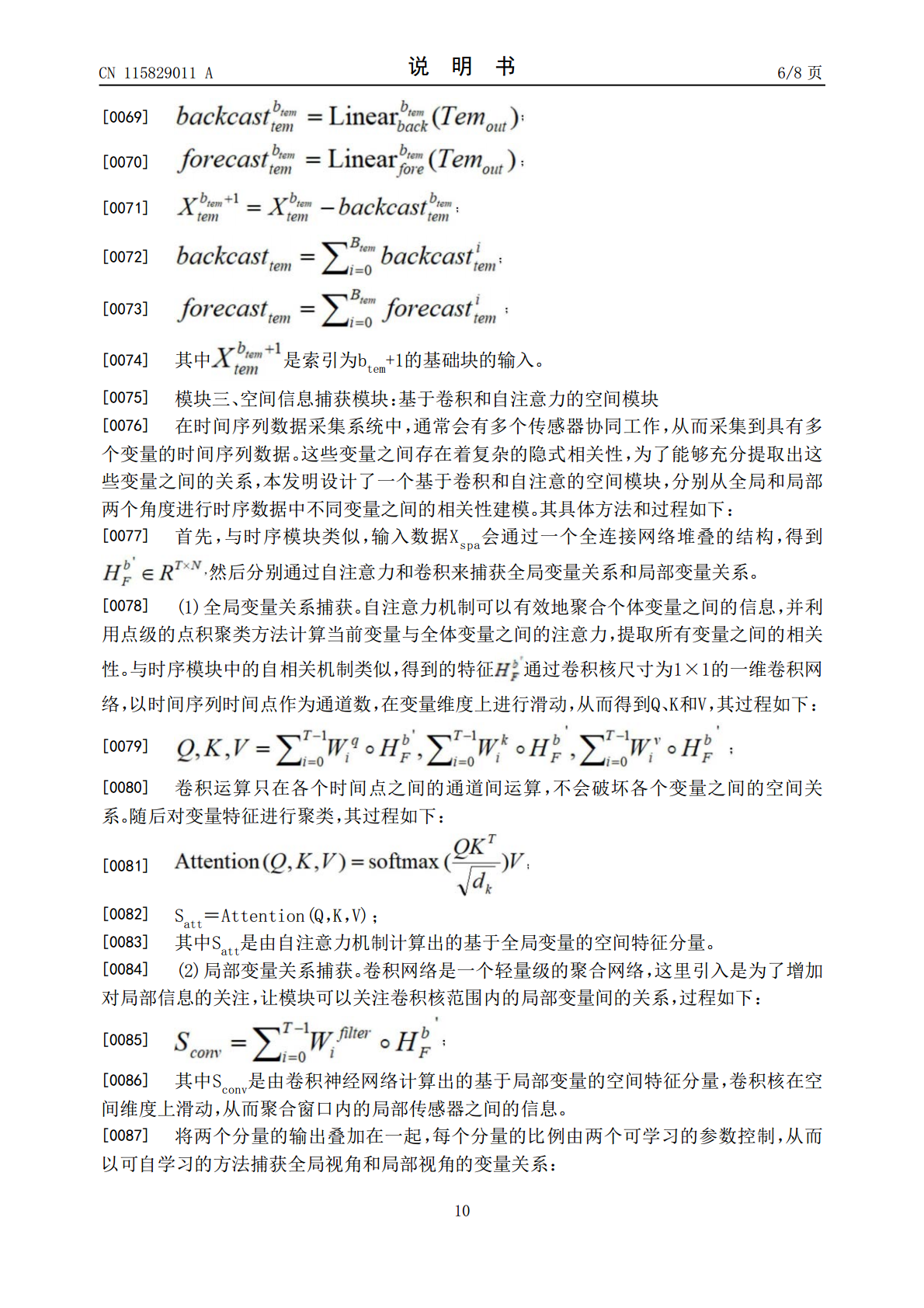
本发明提供了一种基于时空解构的多传感器长时序列预测方法及模型,属于深度学习技术领域;解决了多源时间序列的长时间预测准确性的问题;包括如下步骤:输入传感器历史数据;对传感器历史数据的时间序列的时序信息进行捕获:使用基于自相关机制的时序模块处理时间序列,得到时间序列内隐含的时序关系;对传感器历史数据的时间序列的空间信息进行捕获:使用基于卷积和自注意力的空间模块处理消除时序部分后的时间序列,得到多个不同变量之间的隐含关系;聚合得到长时序列预测:将时序部分预测数据和空间部分预测数据进行求和运算,即可得到最终的预测
一种基于迁移学习的时空序列预测方法.pdf
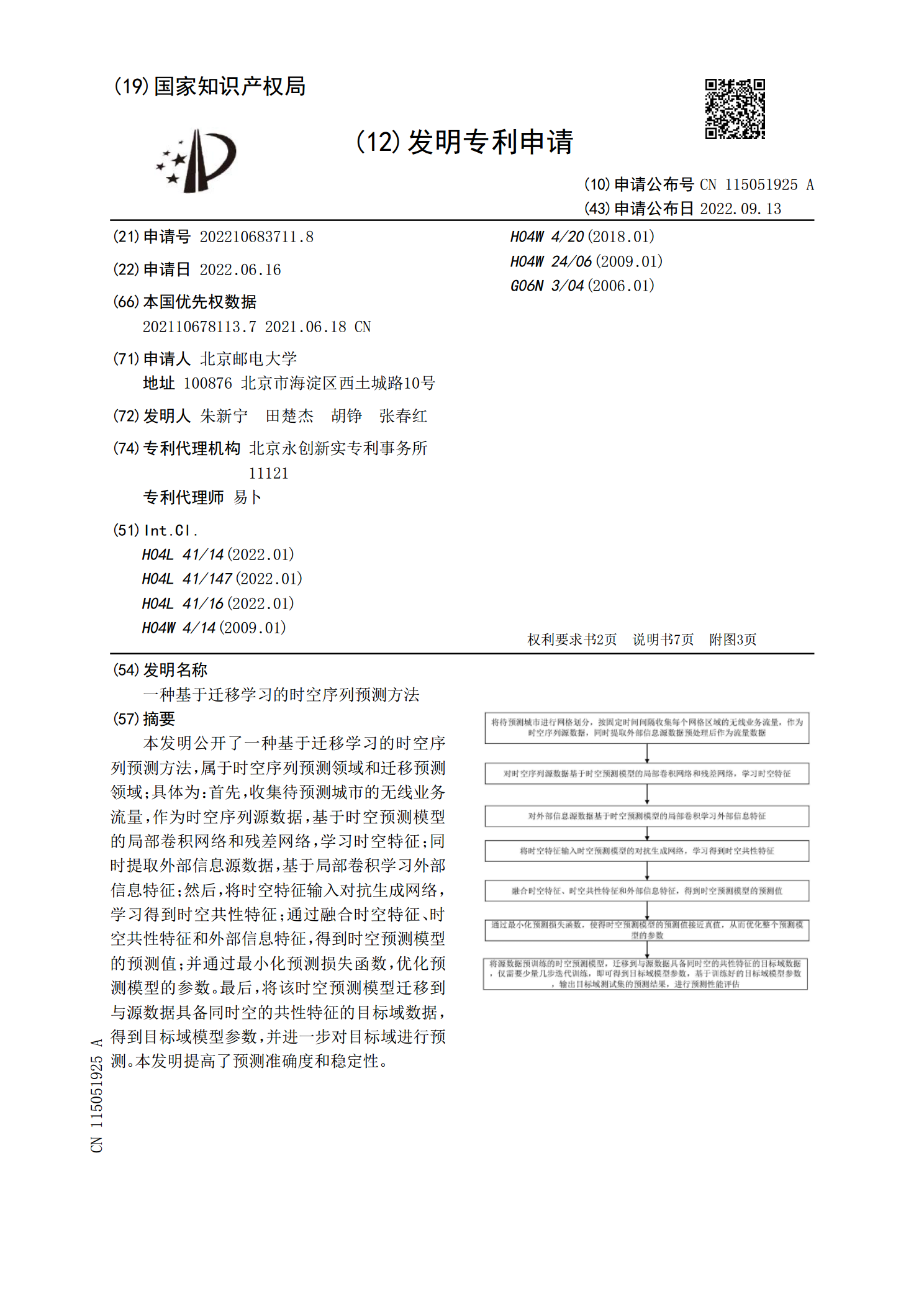
本发明公开了一种基于迁移学习的时空序列预测方法,属于时空序列预测领域和迁移预测领域;具体为:首先,收集待预测城市的无线业务流量,作为时空序列源数据,基于时空预测模型的局部卷积网络和残差网络,学习时空特征;同时提取外部信息源数据,基于局部卷积学习外部信息特征;然后,将时空特征输入对抗生成网络,学习得到时空共性特征;通过融合时空特征、时空共性特征和外部信息特征,得到时空预测模型的预测值;并通过最小化预测损失函数,优化预测模型的参数。最后,将该时空预测模型迁移到与源数据具备同时空的共性特征的目标域数据,得到目标
一种基于序列到序列模型的制冷系统负荷预测方法.pdf
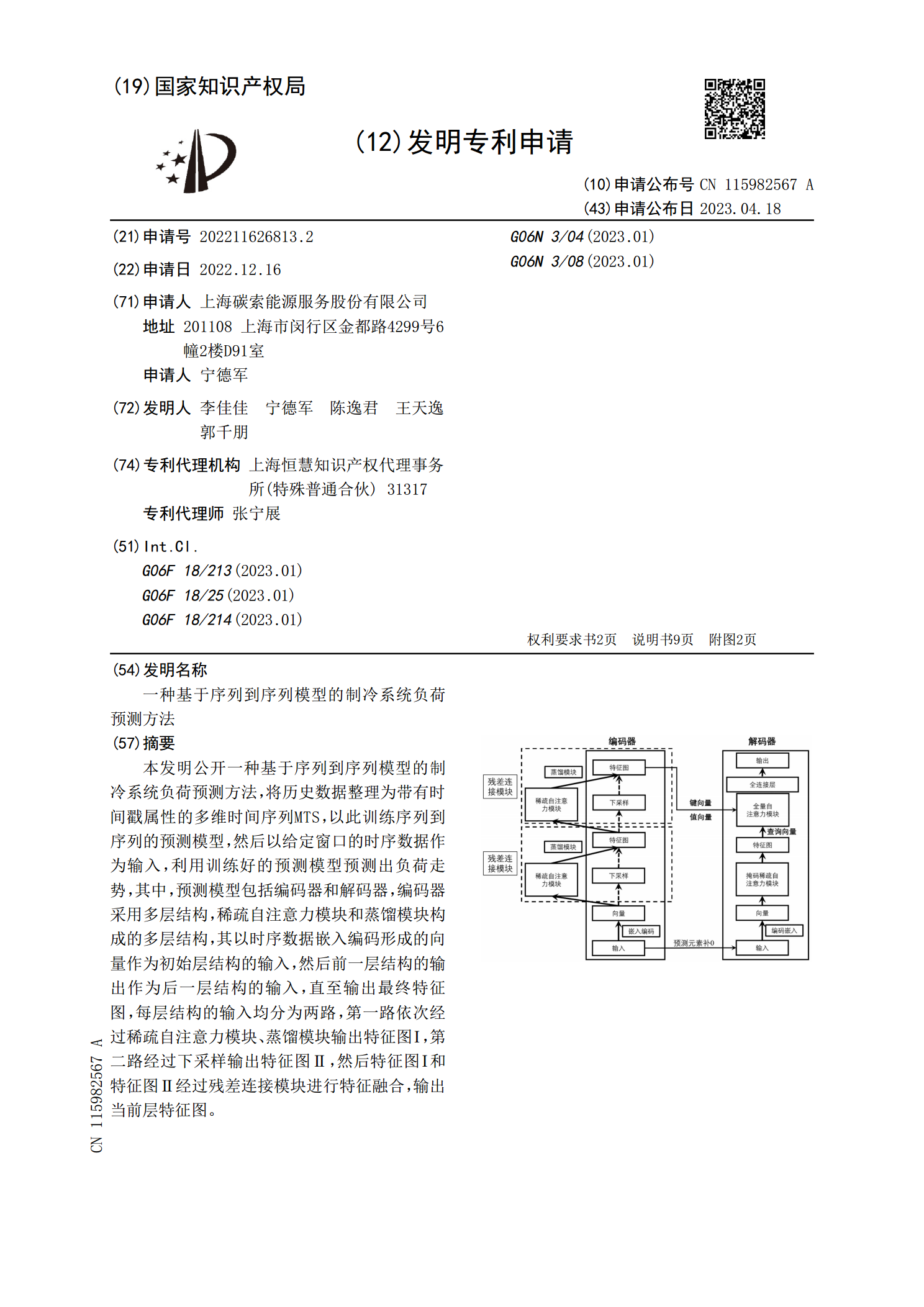
本发明公开一种基于序列到序列模型的制冷系统负荷预测方法,将历史数据整理为带有时间戳属性的多维时间序列MTS,以此训练序列到序列的预测模型,然后以给定窗口的时序数据作为输入,利用训练好的预测模型预测出负荷走势,其中,预测模型包括编码器和解码器,编码器采用多层结构,稀疏自注意力模块和蒸馏模块构成的多层结构,其以时序数据嵌入编码形成的向量作为初始层结构的输入,然后前一层结构的输出作为后一层结构的输入,直至输出最终特征图,每层结构的输入均分为两路,第一路依次经过稀疏自注意力模块、蒸馏模块输出特征图Ⅰ,第二路经过下

一种基于多视角数据和循环网络构建序列预测模型的方法.pdf
本发明公开了一种基于多视角数据和循环网络的序列预测方法,其包括:获取多个用户在不同时刻购买的多个物品的数据,并对数据进行预处理;对所述预处理后的数据进行组合获取物品表达,将各用户物品表达按购买时间排序,形成用户序列;将当前用户序列送到循环网络模型的输入端进行训练;所述循环网络的处理端建立当前用户的表达,输出端计算当前用户对物品的偏好值;更新所述循环网络模型参数;将下一用户序列送到循环网络的输入端进行训练,直至所有用户序列都训练一次称为一次迭代;每次迭代更新全部偏好值的和,迭代多次,直至偏好值的和达到极大值
一种基于密度峰值聚类的多模型时空建模方法.pdf
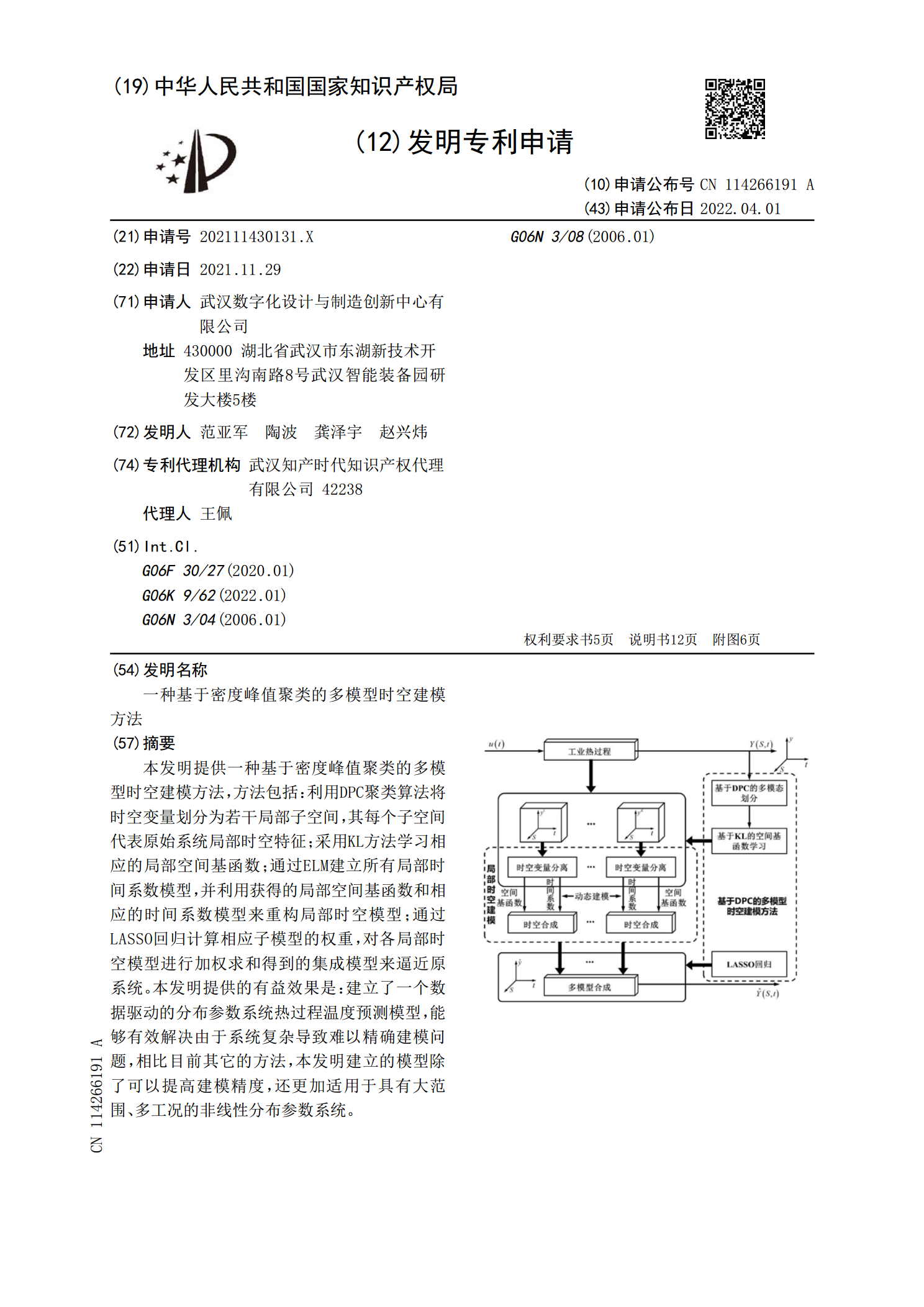
本发明提供一种基于密度峰值聚类的多模型时空建模方法,方法包括:利用DPC聚类算法将时空变量划分为若干局部子空间,其每个子空间代表原始系统局部时空特征;采用KL方法学习相应的局部空间基函数;通过ELM建立所有局部时间系数模型,并利用获得的局部空间基函数和相应的时间系数模型来重构局部时空模型;通过LASSO回归计算相应子模型的权重,对各局部时空模型进行加权求和得到的集成模型来逼近原系统。本发明提供的有益效果是:建立了一个数据驱动的分布参数系统热过程温度预测模型,能够有效解决由于系统复杂导致难以精确建模问题,相