
一种保障车辆快速编队稳定的多车协同控制方法及装置.pdf

书生****写意


1/10
2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种保障车辆快速编队稳定的多车协同控制方法及装置.pdf
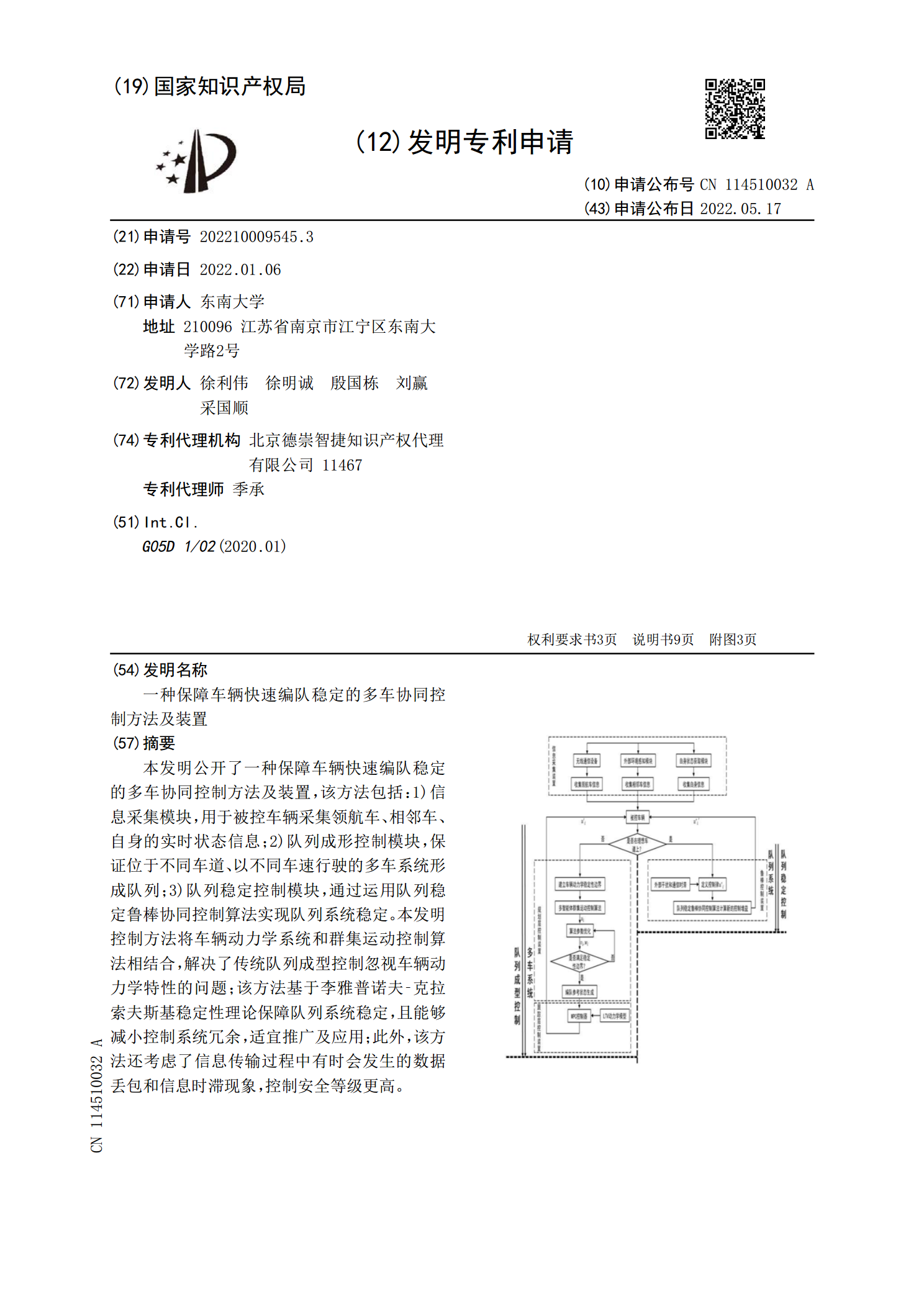
本发明公开了一种保障车辆快速编队稳定的多车协同控制方法及装置,该方法包括:1)信息采集模块,用于被控车辆采集领航车、相邻车、自身的实时状态信息;2)队列成形控制模块,保证位于不同车道、以不同车速行驶的多车系统形成队列;3)队列稳定控制模块,通过运用队列稳定鲁棒协同控制算法实现队列系统稳定。本发明控制方法将车辆动力学系统和群集运动控制算法相结合,解决了传统队列成型控制忽视车辆动力学特性的问题;该方法基于李雅普诺夫?克拉索夫斯基稳定性理论保障队列系统稳定,且能够减小控制系统冗余,适宜推广及应用;此外,该方法还
一种基于车路协同的有人/无人驾驶车辆的编队控制方法.pdf
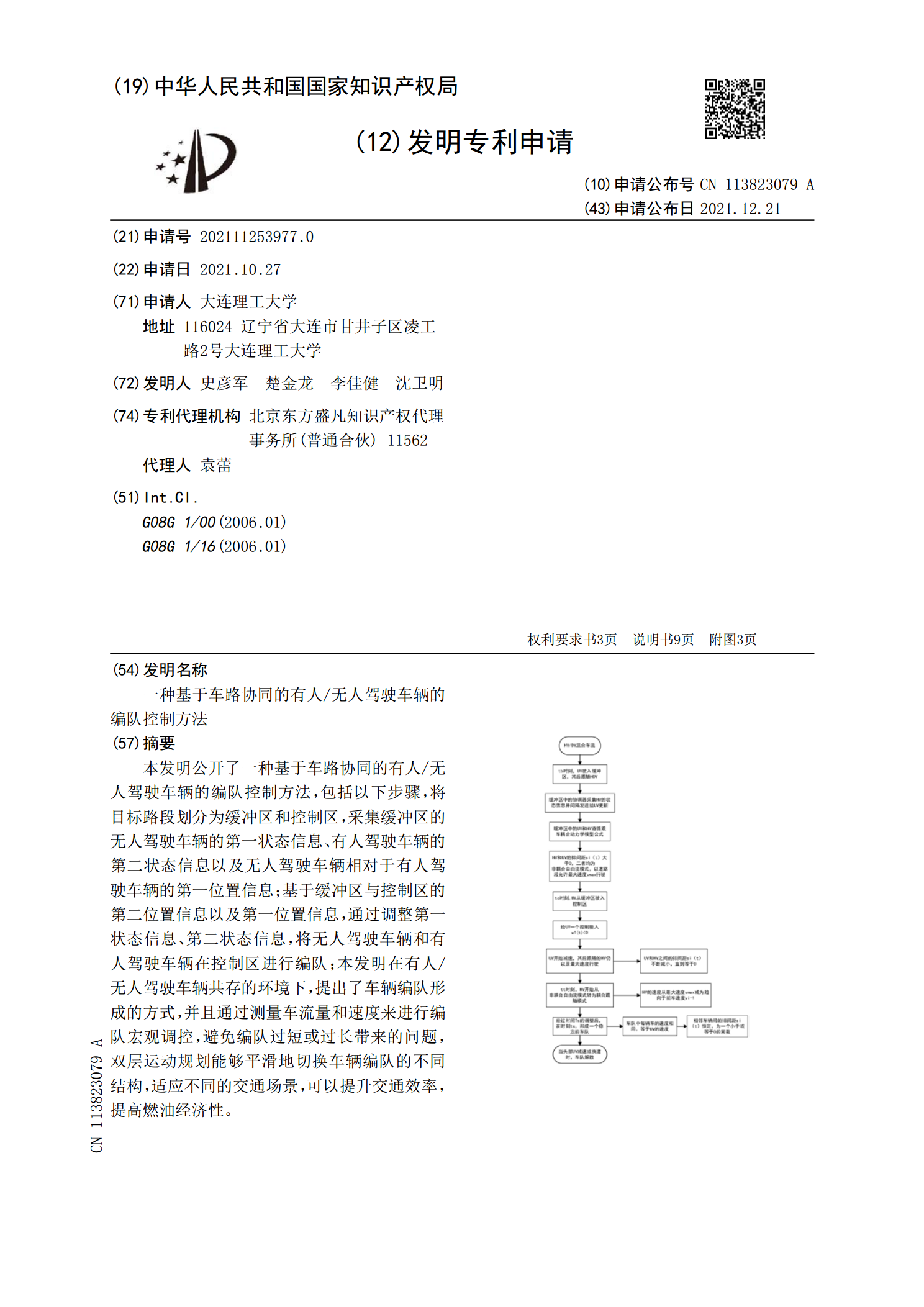
本发明公开了一种基于车路协同的有人/无人驾驶车辆的编队控制方法,包括以下步骤,将目标路段划分为缓冲区和控制区,采集缓冲区的无人驾驶车辆的第一状态信息、有人驾驶车辆的第二状态信息以及无人驾驶车辆相对于有人驾驶车辆的第一位置信息;基于缓冲区与控制区的第二位置信息以及第一位置信息,通过调整第一状态信息、第二状态信息,将无人驾驶车辆和有人驾驶车辆在控制区进行编队;本发明在有人/无人驾驶车辆共存的环境下,提出了车辆编队形成的方式,并且通过测量车流量和速度来进行编队宏观调控,避免编队过短或过长带来的问题,双层运动规划
车辆及车辆编队行驶的控制方法、装置.pdf
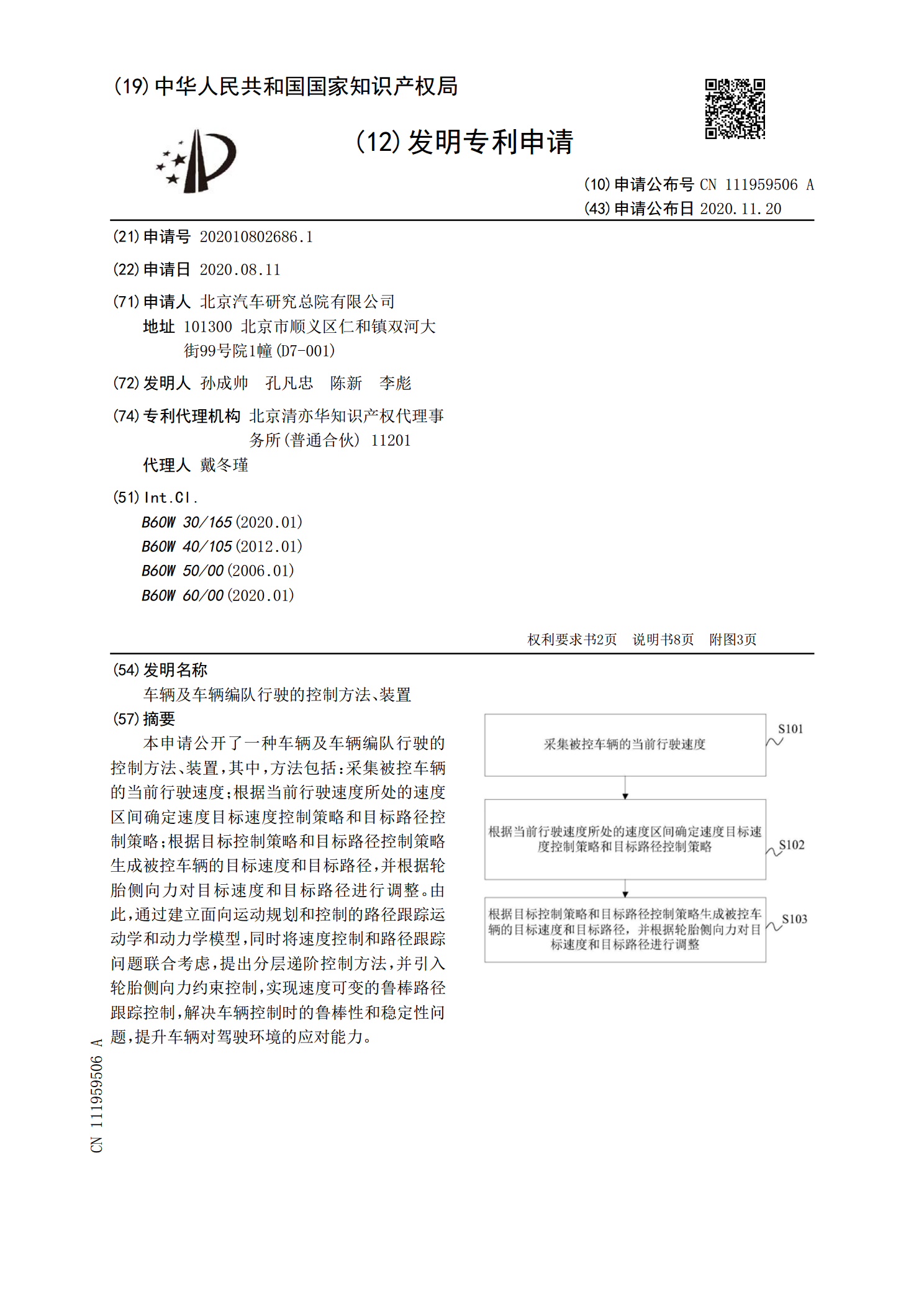
本申请公开了一种车辆及车辆编队行驶的控制方法、装置,其中,方法包括:采集被控车辆的当前行驶速度;根据当前行驶速度所处的速度区间确定速度目标速度控制策略和目标路径控制策略;根据目标控制策略和目标路径控制策略生成被控车辆的目标速度和目标路径,并根据轮胎侧向力对目标速度和目标路径进行调整。由此,通过建立面向运动规划和控制的路径跟踪运动学和动力学模型,同时将速度控制和路径跟踪问题联合考虑,提出分层递阶控制方法,并引入轮胎侧向力约束控制,实现速度可变的鲁棒路径跟踪控制,解决车辆控制时的鲁棒性和稳定性问题,提升车辆对

多车协同定位的车辆控制方法、装置、服务器及介质.pdf
本申请涉及车辆技术领域,特别涉及一种多车协同定位的车辆控制方法、装置、服务器及介质,方法包括:接收至少一辆从车发送的从车自身定位数据,结合主车的自身定位数据得到至少一辆从车与主车之间的实际相对位置信息,基于多个预设测试场景生成至少一辆从车的驾驶行为提醒信息,并发送至少一辆从车,以提醒至少一辆从车的驾驶员进行相应的驾驶行为操作。由此,解决了在目标测试场景中获取数据时无法做到时间同步、实时处理、精准定位,导致测试繁琐,耗费时间长等问题,通过多车协同定位测试系统,实时采集并处理多目标定位数据及位置关系,通过固化

多机器人协同控制与编队方法研究.docx
多机器人协同控制与编队方法研究多机器人协同控制与编队方法研究摘要:随着机器人技术的快速发展,多机器人系统在各个领域得到了广泛应用。在实际应用中,多机器人需要协同工作,以实现更高的效能和更复杂的任务。本论文通过综述多机器人协同控制与编队方法研究的最新进展,探讨了不同方法的优缺点,并提出了未来研究的方向。关键词:多机器人系统;协同控制;编队;方法研究一、引言多机器人系统是指由多个机器人组成的集合体,能够协同工作完成特定任务。在许多实际应用中,多机器人系统可以取代传统的人工作业,提高工作效率和安全性。但是,多机