
一种基于卡尔曼滤波与显式互补滤波的姿态融合算法.pdf

是你****枝呀

1/9
2/9
3/9
4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于卡尔曼滤波与显式互补滤波的姿态融合算法.pdf
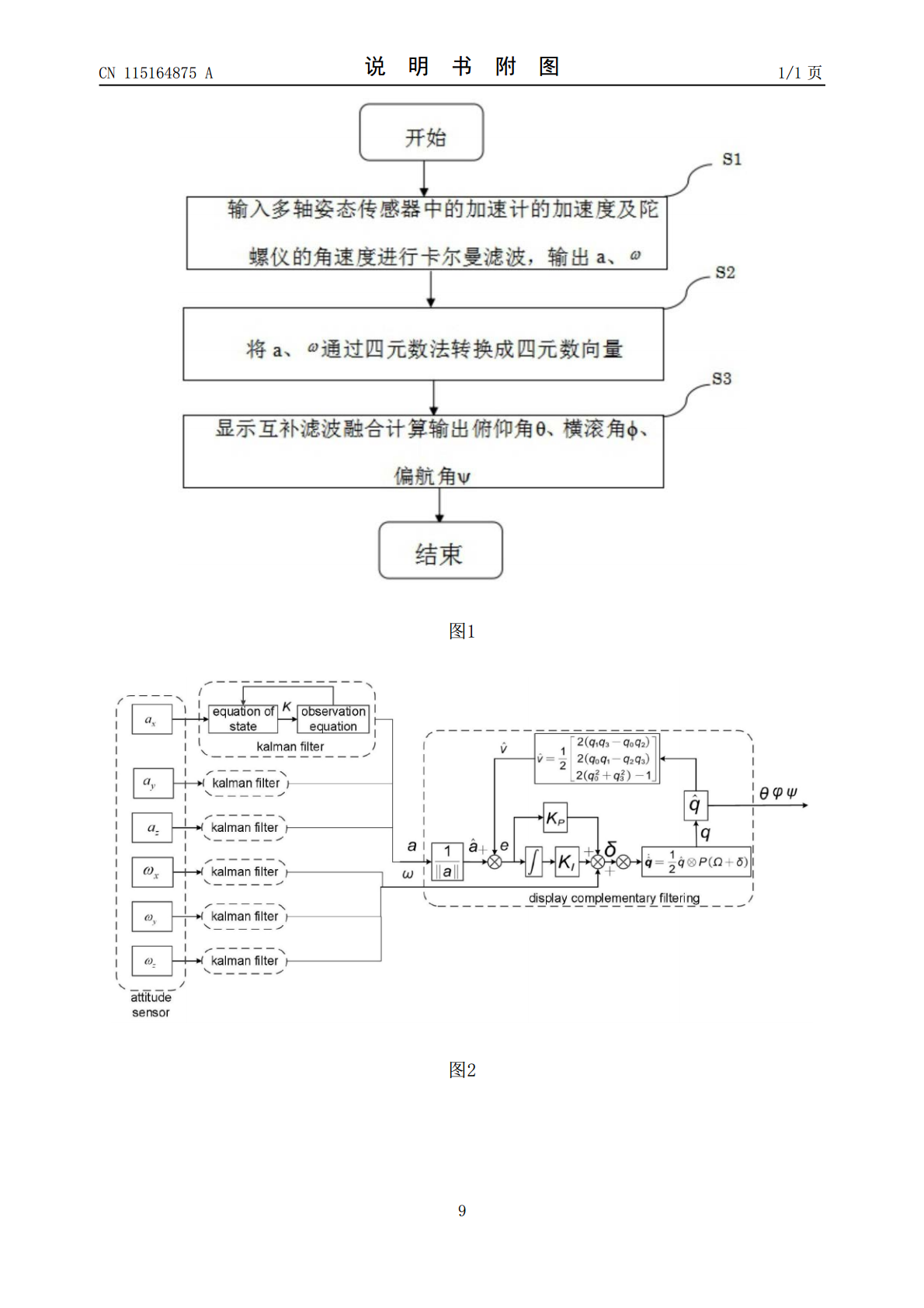
本发明提供了一种基于卡尔曼滤波与显式互补滤波的姿态融合算法,属于传感器数据采集与融合集成技术领域。包括如下步骤:步骤1,选用多轴姿态传感器,将多轴姿态传感器中的加速计的加速度及陀螺仪的角速度进行卡尔曼滤波,输出a、ω;步骤2,将a、ω通过四元数法转换成四元数向量;以及步骤3,将四元数向量进行显示互补滤波融合计算输出俯仰角θ、横滚角φ以及偏航角ψ。因为在本发明中,姿态传感器实时采集加速度、角速度的六个参数,并通过卡尔曼滤波与显式互补滤波进行姿态融合,所以可以避免使用加速度计和陀螺仪时造成的误差,得到精确的俯

姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序.doc
(完整版)姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序(完整版)姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序(完整版)姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序//一阶互补//a=tau/(tau+looptime)//newAngle=anglemeasuredwithatan2usingtheaccelerometer//加速度传感器输出值//newRate=anglemeasuredusingthegyro//looptime=looptimeinmillis(

姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序.doc
(完整版)姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序(完整版)姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序(完整版)姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序//一阶互补//a=tau/(tau+looptime)//newAngle=anglemeasuredwithatan2usingtheaccelerometer//加速度传感器输出值//newRate=anglemeasuredusingthegyro//looptime=looptimeinmillis(

一种基于卡尔曼滤波的姿态信息融合方法.docx
一种基于卡尔曼滤波的姿态信息融合方法摘要姿态信息融合在现代导航系统和机器人控制系统中具有重要的作用。本论文提出了一种基于卡尔曼滤波的姿态信息融合方法。该方法使用传感器测量值和系统动力学方程推导出状态方程和观测方程,并采用卡尔曼滤波进行姿态信息融合。实验结果表明,该方法能够获得更准确和稳定的姿态信息,具有很高的实用性和可靠性。关键词:姿态信息融合;卡尔曼滤波;状态方程;观测方程。引言随着现代导航技术的发展和机器人控制技术的应用,高精度姿态信息对于确保系统的准确性和稳定性变得至关重要。传感器是获取姿态信息的重

基于模糊卡尔曼滤波的姿态估计算法.docx
基于模糊卡尔曼滤波的姿态估计算法基于模糊卡尔曼滤波的姿态估计算法摘要:姿态估计是无人机、机器人等航空航天应用中的重要问题之一,通过准确估计物体的姿态信息,可以为导航、运动控制等任务提供重要参考。本文提出了一种基于模糊卡尔曼滤波(FAKF)的姿态估计算法,该算法充分考虑了姿态估计中的不确定性和模糊性,并通过融合多传感器数据来提高姿态估计的精度和鲁棒性。实验结果表明,相比传统的卡尔曼滤波算法和其他姿态估计算法,本文提出的算法在姿态估计的准确性和鲁棒性方面都具有明显优势。关键词:姿态估计;模糊卡尔曼滤波;不确定