
面齿轮齿面误差测量方法.pdf

景福****90


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
面齿轮齿面误差测量方法.pdf
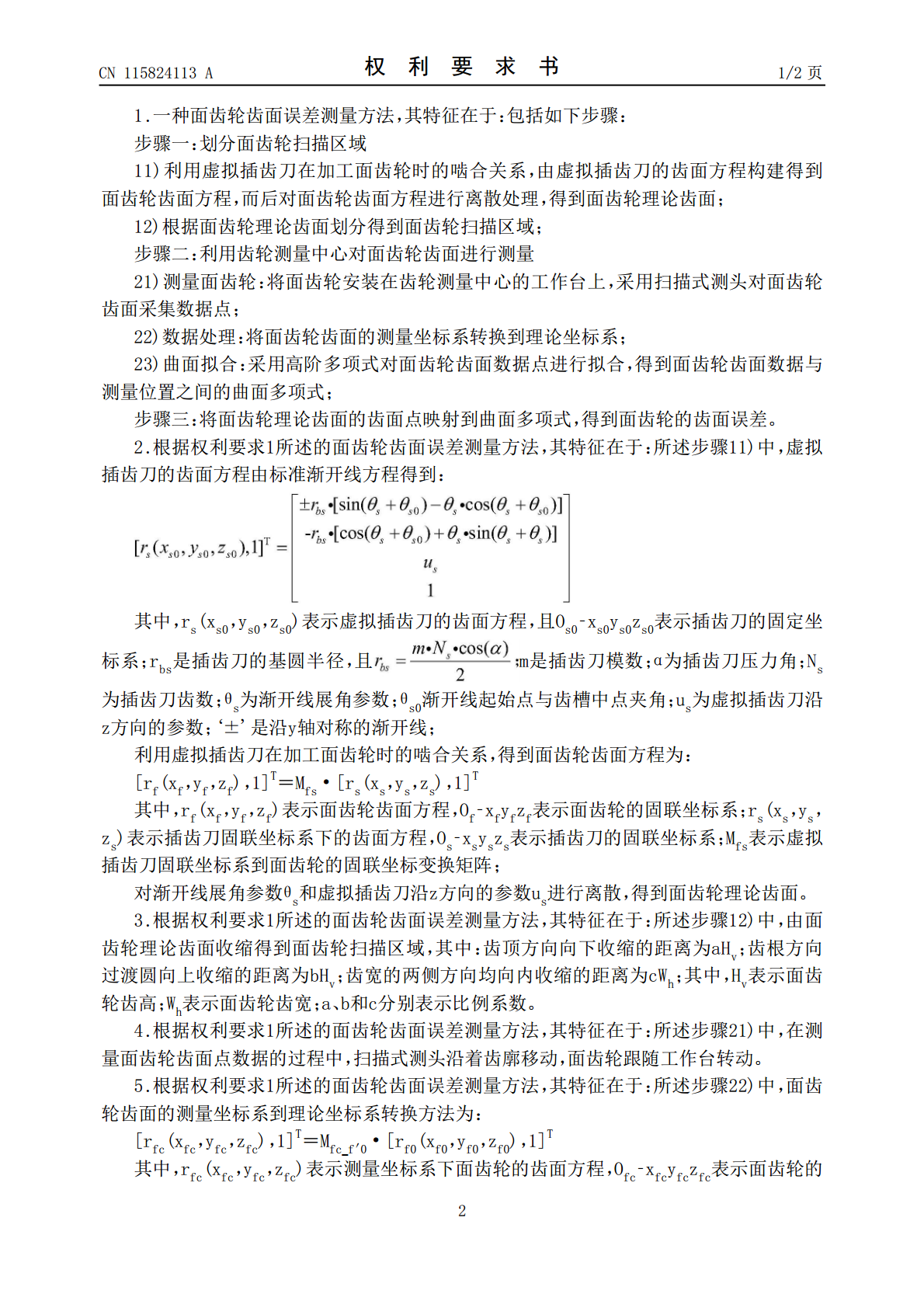
本发明公开了一种面齿轮齿面误差测量方法,包括如下步骤:步骤一:划分面齿轮扫描区域:11)利用虚拟插齿刀在加工面齿轮时的啮合关系,构建得到面齿轮齿面方程,对面齿轮齿面方程进行离散处理,得到面齿轮理论齿面;12)根据面齿轮理论齿面划分得到面齿轮扫描区域;步骤二:利用齿轮测量中心对面齿轮齿面进行测量:21)测量面齿轮:采用扫描式测头对面齿轮齿面采集数据点;22)数据处理:将面齿轮齿面的测量坐标系转换到理论坐标系;23)曲面拟合:采用高阶多项式对面齿轮齿面数据点进行拟合,得到面齿轮齿面数据与测量位置之间的曲面多项
基于数控蜗杆砂轮磨齿机的面齿轮齿距误差在机测量方法.pdf
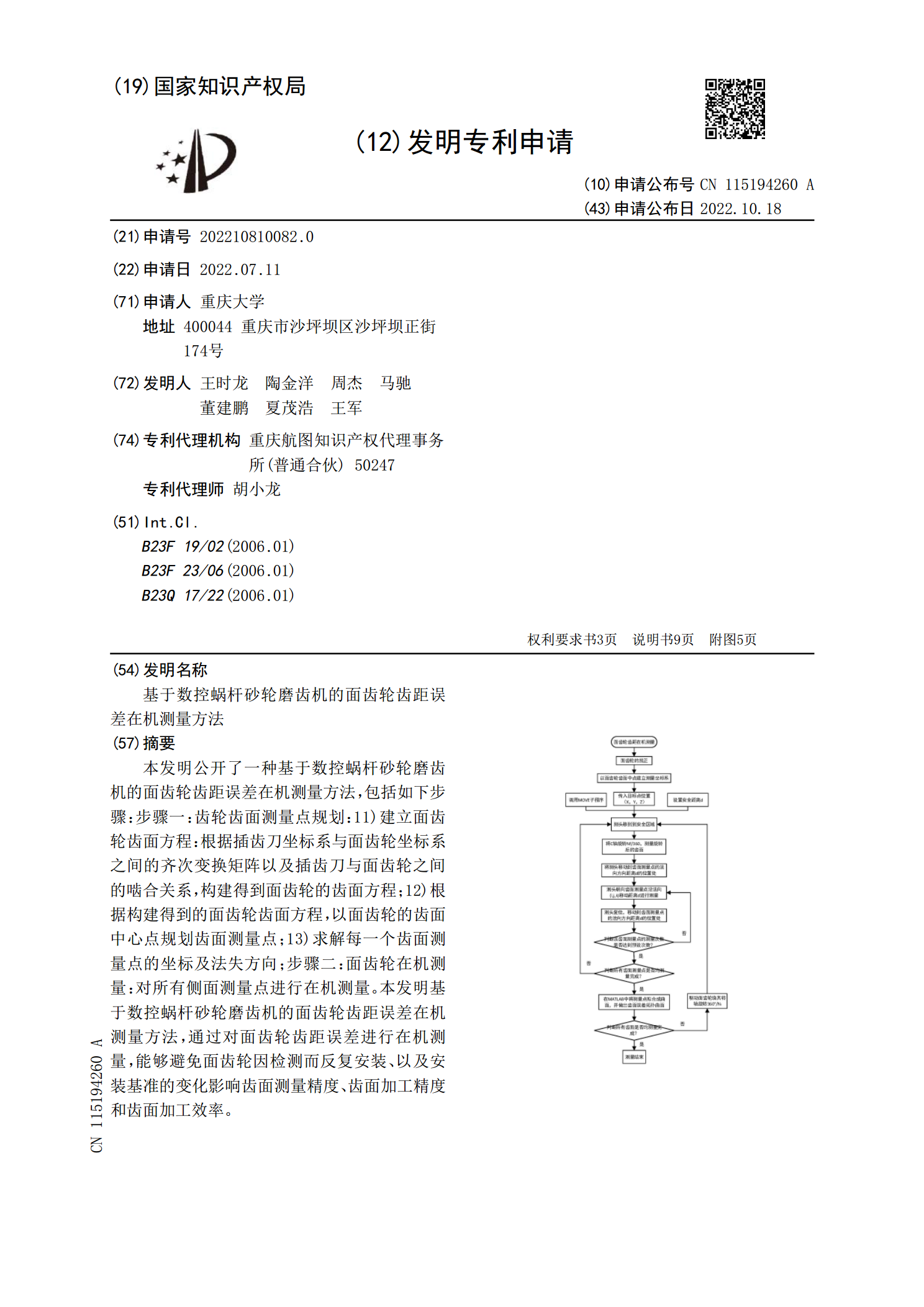
本发明公开了一种基于数控蜗杆砂轮磨齿机的面齿轮齿距误差在机测量方法,包括如下步骤:步骤一:齿轮齿面测量点规划:11)建立面齿轮齿面方程:根据插齿刀坐标系与面齿轮坐标系之间的齐次变换矩阵以及插齿刀与面齿轮之间的啮合关系,构建得到面齿轮的齿面方程;12)根据构建得到的面齿轮齿面方程,以面齿轮的齿面中心点规划齿面测量点;13)求解每一个齿面测量点的坐标及法失方向;步骤二:面齿轮在机测量:对所有侧面测量点进行在机测量。本发明基于数控蜗杆砂轮磨齿机的面齿轮齿距误差在机测量方法,通过对面齿轮齿距误差进行在机测量,能够

面齿轮齿面误差测量中轮齿对称面校准机构及误差测量法.pdf
本发明为面齿轮齿面误差测量中轮齿对称面校准机构及误差测量法,属于齿轮精度测量技术领域。该对称面校准机构可对正交和非正交面齿轮上单一轮齿的对称面进行校准,解决了基于三坐标测量机和齿面云点扫描测量中正交、非正交面齿轮单一轮齿齿形误差基准难以校准的难题,从而实现了基于三坐标测量机和齿面云点扫描的正交、非正交面齿轮轮齿齿形误差的测量问题。本发明利用标准渐开线直齿圆柱齿轮啮合、面齿轮啮合和标准渐开线直齿圆柱齿轮单一轮齿的对称性,解决了正交、非正交面齿轮单一轮齿对称面的基准确定问题,因此具有显著的实质性特点和突出的进
轮齿装夹装置及齿面残余应力测量方法.pdf
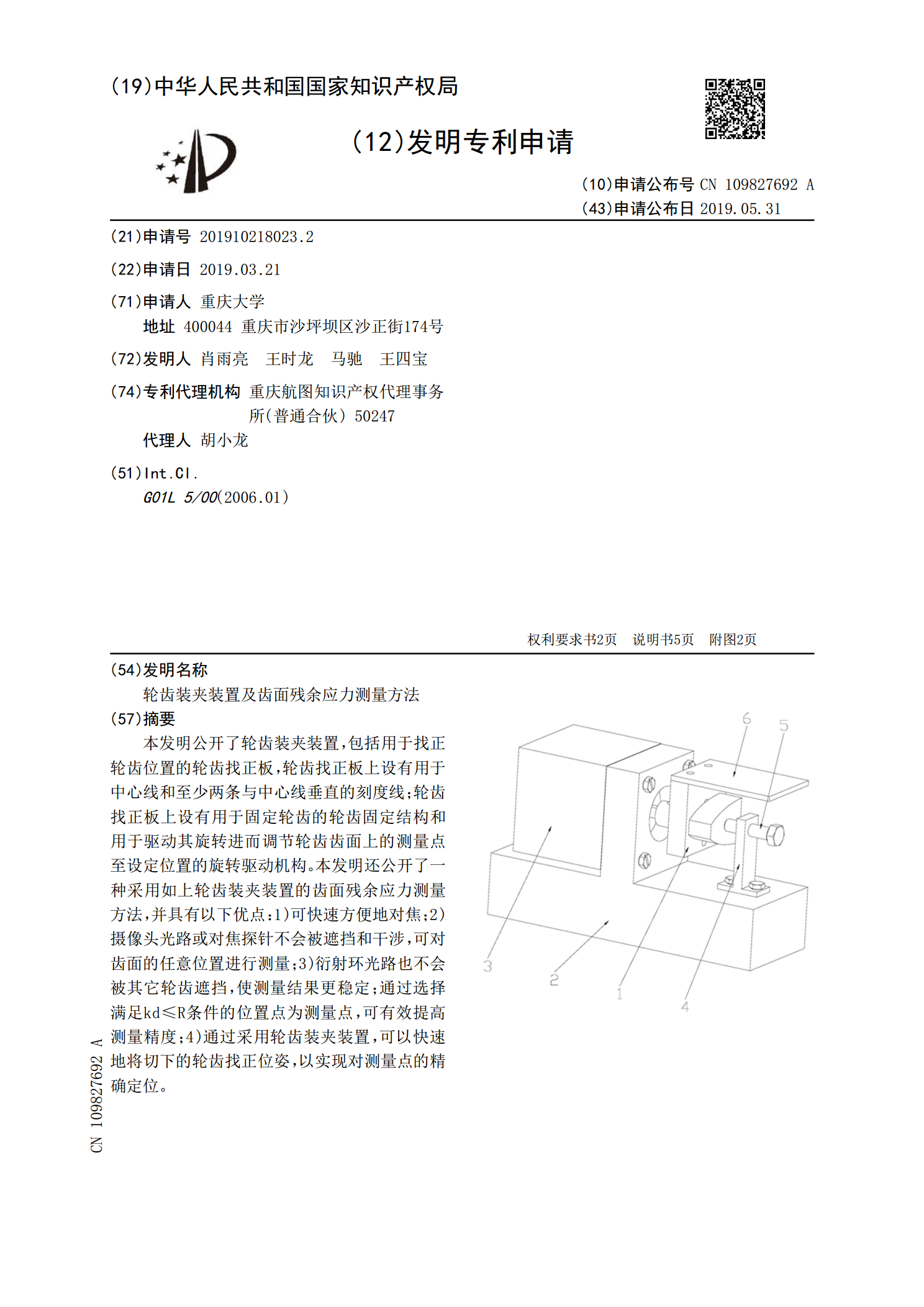
本发明公开了轮齿装夹装置,包括用于找正轮齿位置的轮齿找正板,轮齿找正板上设有用于中心线和至少两条与中心线垂直的刻度线;轮齿找正板上设有用于固定轮齿的轮齿固定结构和用于驱动其旋转进而调节轮齿齿面上的测量点至设定位置的旋转驱动机构。本发明还公开了一种采用如上轮齿装夹装置的齿面残余应力测量方法,并具有以下优点:1)可快速方便地对焦;2)摄像头光路或对焦探针不会被遮挡和干涉,可对齿面的任意位置进行测量;3)衍射环光路也不会被其它轮齿遮挡,使测量结果更稳定;通过选择满足kd≤R条件的位置点为测量点,可有效提高测量精

弧线齿面齿轮齿面接触分析.docx
弧线齿面齿轮齿面接触分析摘要:本论文主要针对弧线齿面齿轮齿面接触进行分析,讨论了齿面接触理论,分析了弧线齿面齿轮齿面接触的基本原理。本文利用实验数据对不同参数下的齿面接触情况进行了分析,并提出了优化设计的建议。关键词:弧线齿面,齿轮齿面接触,优化设计1.引言齿轮是传动装置中最常见的元件之一,具有传递转矩、变速传动和方向传递等重要作用。齿轮齿面接触作为齿轮传动中一个非常重要的参数,对齿轮传动的稳定性、传动效率、噪声、寿命等方面都有很大影响。弧线齿面齿轮是一种性质特殊的齿轮,其主要特点是齿面呈弧形,可实现更大