
基于多尺度时空融合网络模型的刀具磨损状态监测方法.pdf

琰琬****买买

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多尺度时空融合网络模型的刀具磨损状态监测方法.pdf
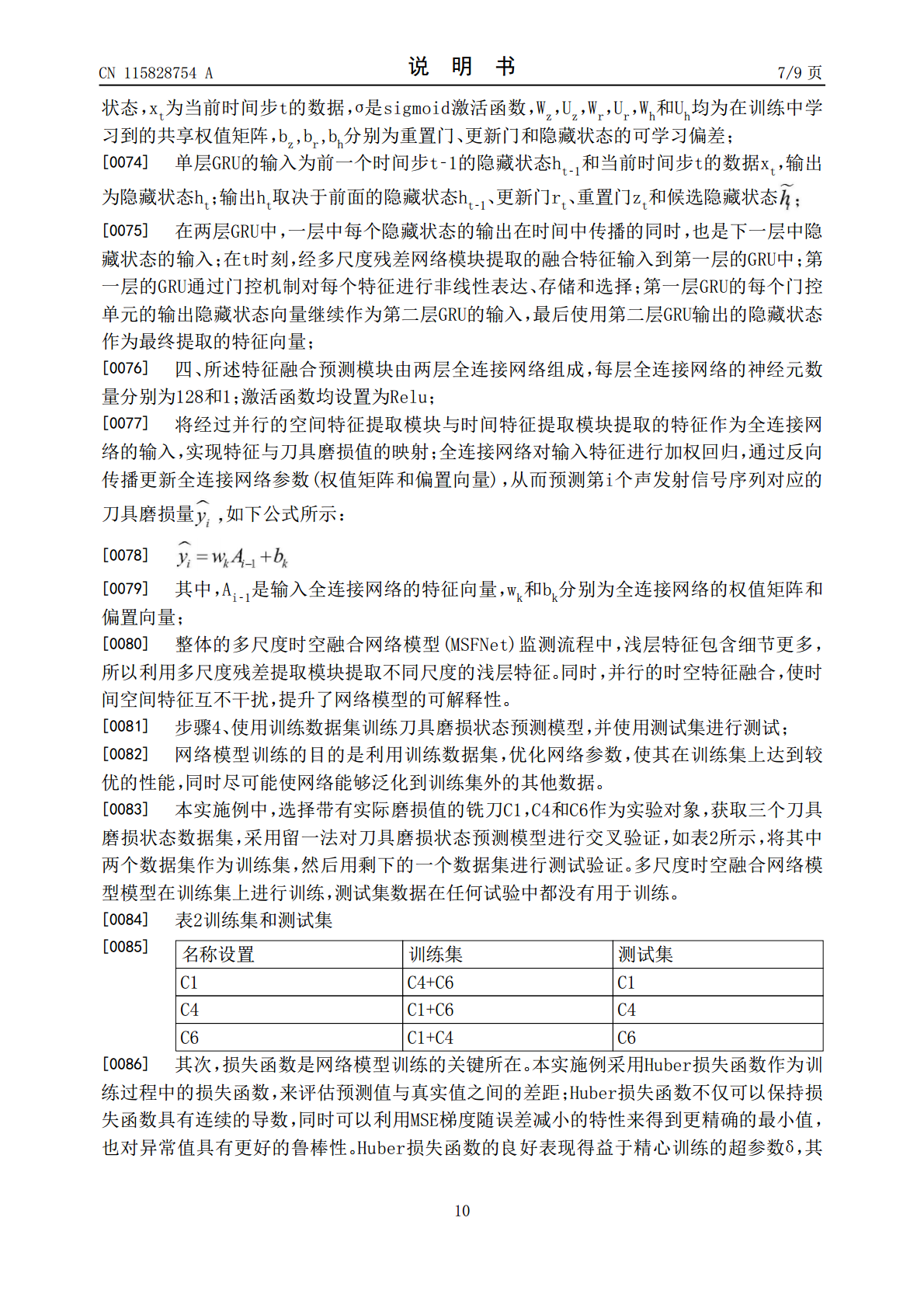
本发明提供一种基于多尺度时空融合网络模型的刀具磨损状态监测方法,涉及刀具状态检测技术领域。该方法首先采集刀具加工过程的原始信号,获得刀具磨损状态数据集;并对刀具磨损状态数据集进行预处理,划分为训练集与测试集;构建多尺度时空融合网络模型作为刀具磨损状态预测模型;使用训练数据集训练刀具磨损状态预测模型,并使用测试集进行测试;然后使用训练好的刀具磨损状态预测模型预测待监测的刀具磨损状态;最后对已预测的刀具磨损状态进行平滑处理,得到平滑化的预测刀具磨损状态。该方法相对其他深度学习方法,提高了网络可解释性的同时,大
发明公布-202211576575.9-基于多尺度时空融合网络模型的刀具磨损状态监测方法.pdf
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN115828754A(43)申请公布日2023.03.21(21)申请号202211576575.9G06N3/048(2023.01)(22)申请日2022.12.09G06N3/08(2023.01)G05B19/4065(2006.01)(71)申请人辽宁石油化工大学G05B17/02(2006.01)地址113005辽宁省抚顺市望花区丹东路西段1号(72)发明人刘长福权宇周洋刘博王道海柳建平王志强佟昊王宪跃王宇(74)专利代理机构沈阳

基于特征融合的刀具磨损监测方法.docx
基于特征融合的刀具磨损监测方法基于特征融合的刀具磨损监测方法摘要:随着制造业的不断发展,刀具磨损监测在提高生产效率和降低成本方面起着关键作用。传统的刀具磨损监测方法通常依赖于人工经验和经验规则,不能真实准确地反映刀具的磨损情况。针对这个问题,本文提出了一种基于特征融合的刀具磨损监测方法。该方法将多种特征融合在一起,从而实现对刀具磨损情况的准确监测。实验结果表明,该方法能够有效地提高刀具磨损监测的准确性和稳定性,具有较好的实际应用价值。关键词:刀具磨损监测、特征融合、生产效率、成本降低1.引言刀具磨损是制造

基于多源数据融合的铣刀磨损状态监测.pptx
,目录PartOnePartTwo数据融合技术的原理数据融合在铣刀磨损监测中的应用数据融合的优势与挑战PartThree铣刀磨损的常见监测方法基于多源数据融合的监测方法监测方法的准确性和可靠性PartFour数据采集与预处理数据特征提取与选择融合算法与模型构建监测结果评估与优化PartFive案例一:某机械加工企业的应用案例二:某航空制造企业的应用案例三:某汽车制造企业的应用案例总结与启示PartSix铣刀磨损状态监测技术的发展趋势多源数据融合技术的进一步研究与应用提高监测准确性和可靠性的方法与技术智能制

基于电流信号的刀具磨损状态监测方法研究.docx
基于电流信号的刀具磨损状态监测方法研究基于电流信号的刀具磨损状态监测方法研究摘要:随着制造业的发展,刀具在机械加工过程中扮演着至关重要的角色。然而,刀具的磨损是一个不可避免的问题,会严重影响加工质量和效率。因此,实时监测刀具磨损状态是十分必要的。本文提出了一种基于电流信号的刀具磨损状态监测方法,利用电流信号的特征参数对刀具的磨损程度进行监测和预测。实验结果表明,该方法具有良好的准确性和鲁棒性,能够有效地提高加工过程的稳定性和可靠性。关键词:刀具磨损,状态监测,电流信号,特征参数,预测1.引言随着制造业对产