
复杂场景下基于目标检测和模板匹配的工件识别计数方法.pdf

白真****ng

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
复杂场景下基于目标检测和模板匹配的工件识别计数方法.pdf
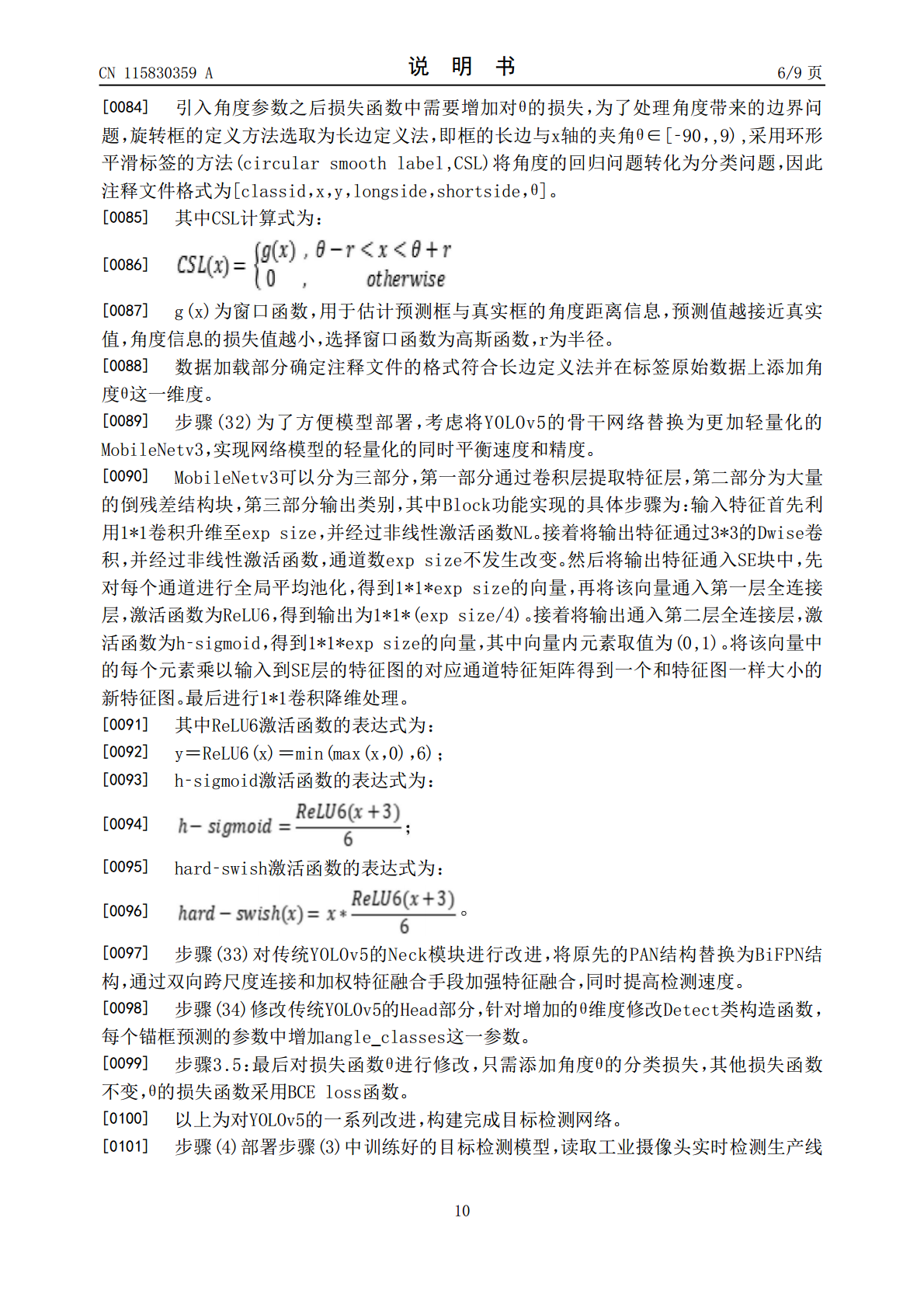
本发明涉及目标检测和模板匹配技术领域,具体为复杂场景下基于目标检测和模板匹配的工件识别计数方法,包括以下步骤:利用高清工业相机获取标准工件原始数据集;对工件图像集进行预处理、数据增广、裁剪及分类标注得到增强数据集;构建基于改进YOLOv5的目标检测网络模型并进行数据集训练:部署训练好的目标检测模型读取工业摄像头实时检测生产线上的工件,旋转角度后裁剪并保存识别出的各个工件图像。本发明的优势在于,首先通过深度学习目标检测的手段从复杂场景图像中识别出工件,得到工件的位置信息,对于环境信息的敏感有更好的鲁棒性。能
一种基于特征增强的复杂场景下小目标检测方法.pdf
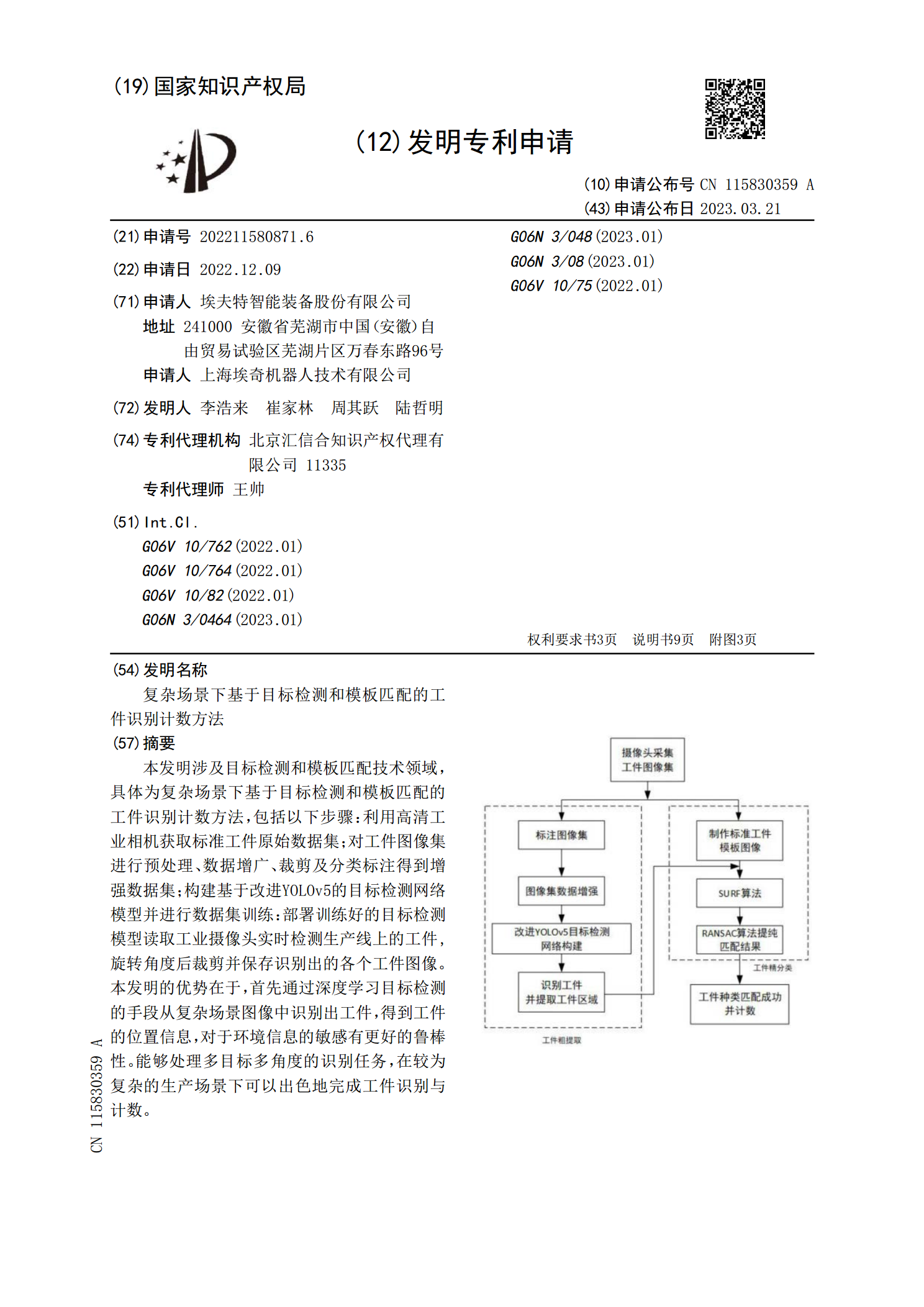
本发明属于计算机视觉和目标检测领域,具体涉及一种基于特征增强的复杂场景下小目标检测方法。本发明的技术方案是:首先提出Cutout‑DA数据增强方法,生成新的遮挡数据扩充至VisDrone2021数据集中,然后设计多尺度融合的特征增强路径聚合网络MSFE‑PANet,通过集成注意机制、特征融合以及针对小目标的网络预测尺度策略,获取到更丰富、细致的语义信息特征和空间信息特征,设计预测框排斥损失函数RB_Loss,最后训练模型。本发明可以增强深层特征图的强定位信息与浅层特征图的强语义信息相互融合,帮助网络在复杂

基于弱监督的复杂场景下目标细粒度识别方法研究的开题报告.docx
基于弱监督的复杂场景下目标细粒度识别方法研究的开题报告一、研究背景目标检测和目标识别已经是计算机视觉领域的核心问题,因为这两个任务的完成可以为许多实际应用提供关键性的支持。虽然近年来这两个任务已经极大地改进了其准确性,但在复杂的场景中仍然存在许多挑战。其中之一是目标细粒度识别的问题,也就是在目标检测的基础上进一步提取目标细节信息,比如更精细的分类和更准确的定位。现有的细粒度识别方法主要关注于是从狭窄的数据集中学习目标的局部细节信息,并且通常需要大量的手动注释。但是,在现实场景中,由于时间和成本的限制,而且

复杂场景下的人体头部识别方法.doc
说明书复杂场景下的人体头部识别方法技术领域本发明涉及一种视频分析技术,具体的说是一种在有摄像机获取的复杂场景下的人体头部识别方法。在普通视频监控中,人群的行进多出现相互遮挡、重叠现象,不便于单独人体的识别与跟踪。为避免这种现象,提高计数精度,现有基于视频的客流统计系统往往要求摄像头垂直向下照射。其缺点是需要独立安装摄像头,适应性差,不兼容于原有监控系统。而且垂直角度摄像头取得视频信息量少,达不到监控目的。普通监控设备一般安装于高处,与水平成30~70度夹角。在人群监控过程中

复杂场景下视频目标检测方法研究的开题报告.docx
复杂场景下视频目标检测方法研究的开题报告一、选题背景随着现代数字技术的广泛应用,视频目标检测在实际应用中得到了广泛地应用。视频目标检测是指通过对视频中各个帧进行分析,自动地识别和定位出其中的目标,是对视频内容处理的一个重要的研究领域。目前,视频目标检测已经应用于交通监控、智能控制、医学图像分析、电影制作等多个领域中。在实际应用过程中,视频目标检测需要在复杂的场景下进行,这些场景包括光照不均、噪声干扰、相机运动等。这会对视频目标检测算法带来挑战性。因此,本研究旨在研究复杂场景下视频目标检测方法,为视频目标检