
基于轻量化强化学习的城市多径环境下北斗卫星定位方法.pdf

一只****ua


1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于轻量化强化学习的城市多径环境下北斗卫星定位方法.pdf
本发明涉及一种基于轻量化强化学习的城市多径环境下北斗卫星定位方法。具体包括以下步骤:引入部分可观测马尔可夫决策过程建立环境交互模型;构建包括一个主智能体及多个子智能体的模型框架,得到高性能主智能体作为深度强化学习教师模型;对教师模型策略剪枝,得到稀疏化学生模型,测量冗余度后对稀疏化学生模型进行重构并重新训练,得到高性能学生轻量化模型;将高性能学生轻量化模型部署在车载定位设备上,实时定位校正卫星参数并获取校正后的定位信息;将校正后的定位信息按照时间序列输出到真实路面;本发明能够实现对城市复杂环境的动态学习,
多径环境下基于信号传播路径推算的无线定位方法.pdf
本发明公开一种多径环境下基于信号传播路径推算的无线定位方法,该方法包括如下步骤:S1、基站广播无线信号;S2、移动台接收到无线信号后向基站发出定位请求;S3、基站借助地理信息系统GIS对移动台进行基于信号传播路径推算的无线定位,并将定位结果发送至移动台。本发明所述技术方案解决了消除了多径传播对定位性能的影响,仿真结果表明,在控制角度测量值误差的情况下,本发明所述技术方案取得了较好的定位效果。将本发明所述技术方案应用在室内环境和微蜂窝小区环境下,有较强的实用性。

北斗卫星导航信号多径性能分析.docx
北斗卫星导航信号多径性能分析北斗卫星导航是中国自主研制的全球卫星导航系统,提供准确、可靠的导航和定位服务。然而,在实际应用中,北斗卫星导航系统的信号存在多径效应,会对导航精度和可靠性造成一定影响。因此,对北斗卫星导航信号的多径性能进行分析是非常重要的。多径效应是指导航信号在传播过程中,除了直射路径外,还经过其他路径反射、折射等,导致接收器接收到多个信号,并且这些信号之间存在相位差和幅度差。多径效应主要受到地物和环境的影响,如建筑物、地形、植被等。这些障碍物会对导航信号产生反射、折射等,使得接收器接收到的信

北斗GEO卫星多径误差的分析与估计.docx
北斗GEO卫星多径误差的分析与估计随着北斗导航系统的发展,其应用范围也越来越广泛。但是,在实际的应用中,卫星信号传输中的多径误差会对精确度造成一定影响,因此需要对北斗GEO卫星的多径误差进行分析与估计。本文将从以下几个方面进行探讨:一、北斗GEO卫星多径误差的成因北斗GEO卫星多径误差的成因主要包括以下几个方面:1.信号反射:北斗卫星会被地面、建筑物等物体反射,使得信号到达接收机的时间延长,从而引起多径误差。2.大气折射:大气中的湿度和温度等因素会导致信号被折射,从而产生多径效应。3.接收机和周边环境的影
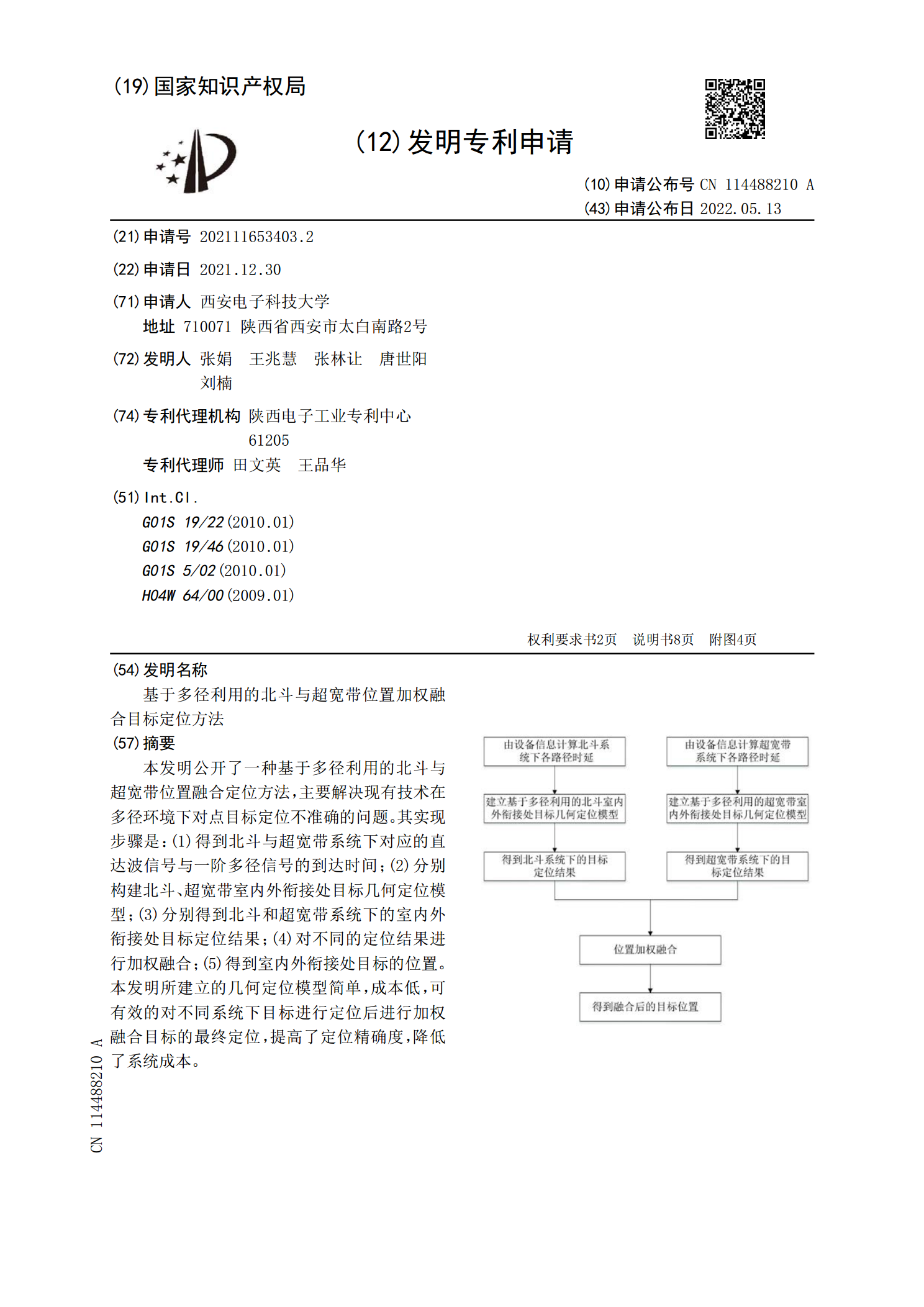
基于多径利用的北斗与超宽带位置加权融合目标定位方法.pdf
本发明公开了一种基于多径利用的北斗与超宽带位置融合定位方法,主要解决现有技术在多径环境下对点目标定位不准确的问题。其实现步骤是:(1)得到北斗与超宽带系统下对应的直达波信号与一阶多径信号的到达时间;(2)分别构建北斗、超宽带室内外衔接处目标几何定位模型;(3)分别得到北斗和超宽带系统下的室内外衔接处目标定位结果;(4)对不同的定位结果进行加权融合;(5)得到室内外衔接处目标的位置。本发明所建立的几何定位模型简单,成本低,可有效的对不同系统下目标进行定位后进行加权融合目标的最终定位,提高了定位精确度,降低了