
三维扫描系统的标定路径规划方法和标定方法.pdf

美丽****ka


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
三维扫描系统的标定路径规划方法和标定方法.pdf
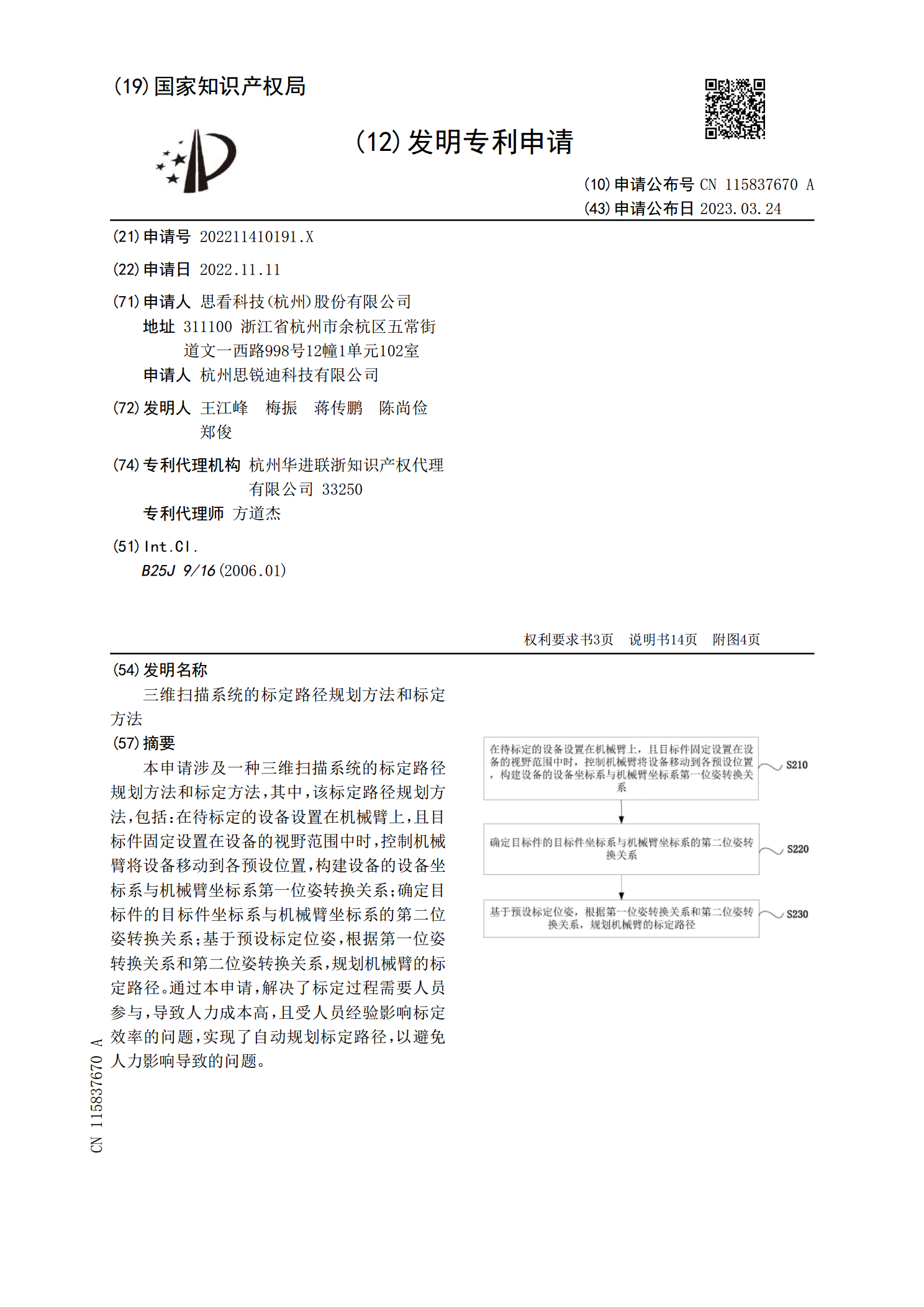
本申请涉及一种三维扫描系统的标定路径规划方法和标定方法,其中,该标定路径规划方法,包括:在待标定的设备设置在机械臂上,且目标件固定设置在设备的视野范围中时,控制机械臂将设备移动到各预设位置,构建设备的设备坐标系与机械臂坐标系第一位姿转换关系;确定目标件的目标件坐标系与机械臂坐标系的第二位姿转换关系;基于预设标定位姿,根据第一位姿转换关系和第二位姿转换关系,规划机械臂的标定路径。通过本申请,解决了标定过程需要人员参与,导致人力成本高,且受人员经验影响标定效率的问题,实现了自动规划标定路径,以避免人力影响导致
一种扫描系统、扫描系统的标定装置及标定方法.pdf
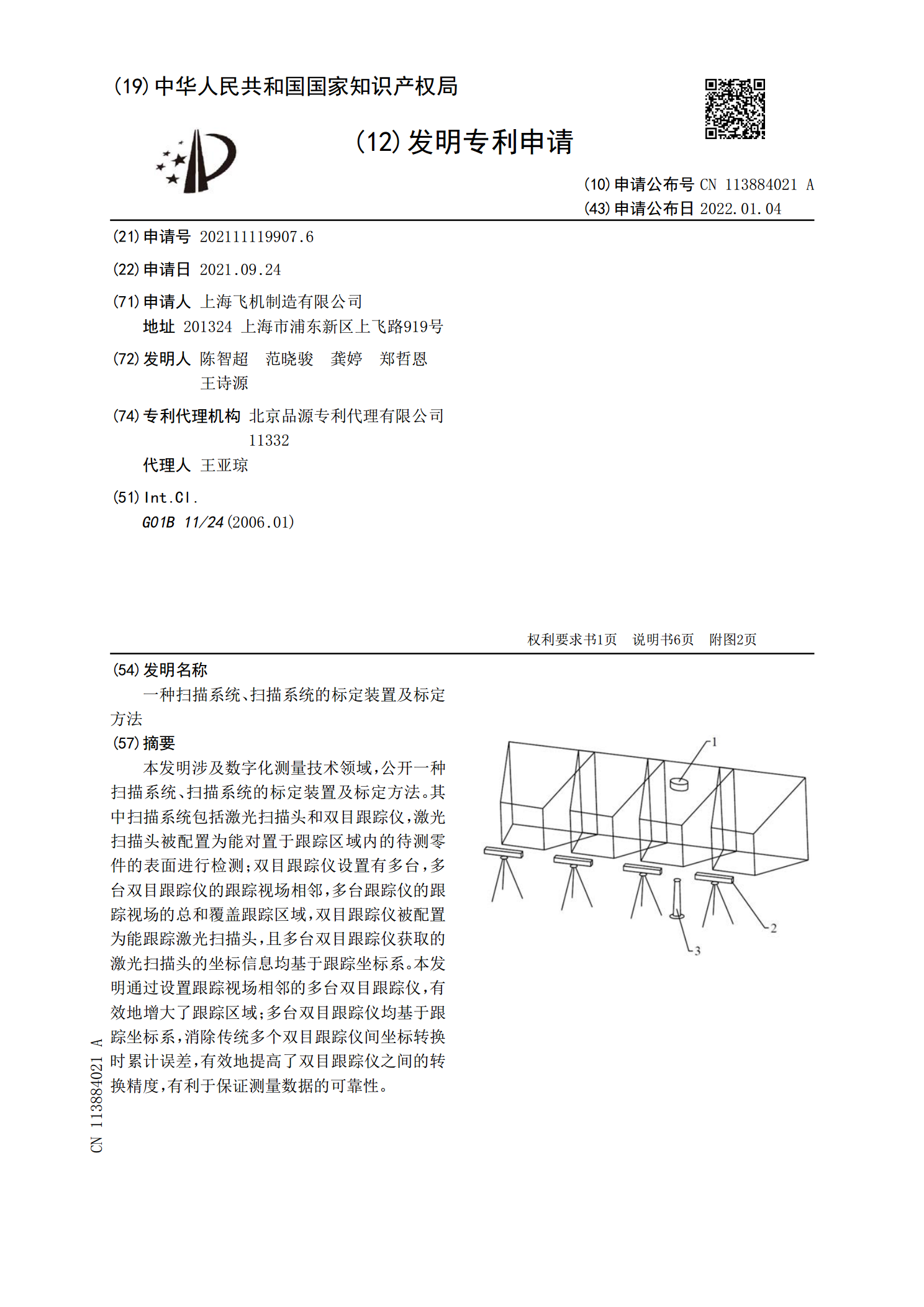
本发明涉及数字化测量技术领域,公开一种扫描系统、扫描系统的标定装置及标定方法。其中扫描系统包括激光扫描头和双目跟踪仪,激光扫描头被配置为能对置于跟踪区域内的待测零件的表面进行检测;双目跟踪仪设置有多台,多台双目跟踪仪的跟踪视场相邻,多台跟踪仪的跟踪视场的总和覆盖跟踪区域,双目跟踪仪被配置为能跟踪激光扫描头,且多台双目跟踪仪获取的激光扫描头的坐标信息均基于跟踪坐标系。本发明通过设置跟踪视场相邻的多台双目跟踪仪,有效地增大了跟踪区域;多台双目跟踪仪均基于跟踪坐标系,消除传统多个双目跟踪仪间坐标转换时累计误差,

三维力传感器的标定设备、标定测试系统及标定方法.pdf
本发明公开了一种三维力传感器的标定设备,包括设置于测试平台的测试云台和施力结构;所述测试云台上安装有待标定三维力传感器,所述待标定三维力传感器上安装有测试端子;所述测试云台包括单摇臂结构、安装于单摇臂结构上的转台和固定底座,所述转台转动安装于所述单摇臂结构,所述单摇臂结构通过旋转改变法向角度,所述转台通过旋转改变切向角度;所述施力结构包括横向滑动机构、纵向滑动机构、单维力传感器、推杆主体和推杆头。该标定设备结构更加简单,利用线性拟合出标定数据的曲线,实现对三维力传感器的自动标定、数据写入和出厂测试。

三维扫描测头的标定方法.docx
三维扫描测头的标定方法三维扫描技术是一种通过激光或光学传感器获取物体表面几何信息并生成三维模型的方法。而三维扫描测头在这一过程中起到了关键的作用,它是连接三维扫描仪与被测物体之间信息传递的桥梁。为了确保三维扫描测头的测量精度和准确性,需要进行准确的标定。本文将介绍几种常用的三维扫描测头标定方法,并对其原理和应用进行详细阐述。一、激光标定法激光标定法是目前应用最广泛的三维扫描测头标定方法之一。其基本原理是通过精确的几何测量和反算来获取相机像素坐标和世界坐标之间的转换关系,从而实现对三维扫描测头的标定。具体步

三维扫描系统模型参数标定方法研究的开题报告.docx
三维扫描系统模型参数标定方法研究的开题报告一、选题背景及意义近年来,三维扫描技术已经成为工业制造、文化遗产保护、医学等领域中不可或缺的工具之一。它通过从物体表面获取大量离散点云数据,进而实现对物体的建模,以及对其形态、纹理、色彩等特征的分析和描述。然而,在实际应用过程中,三维扫描所获取到的数据可能存在误差,如噪声、形变、拓扑错误等。因此,针对这些误差,需要进行数据处理与标定,以提高三维扫描系统的精度和可靠性。本文针对三维扫描系统中的模型参数标定问题进行研究,旨在解决三维数据处理与标定中存在的误差问题,提高