
一种用于管道清洁的仿生蠕动攀爬机器人.pdf

是你****元呀

1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于管道清洁的仿生蠕动攀爬机器人.pdf
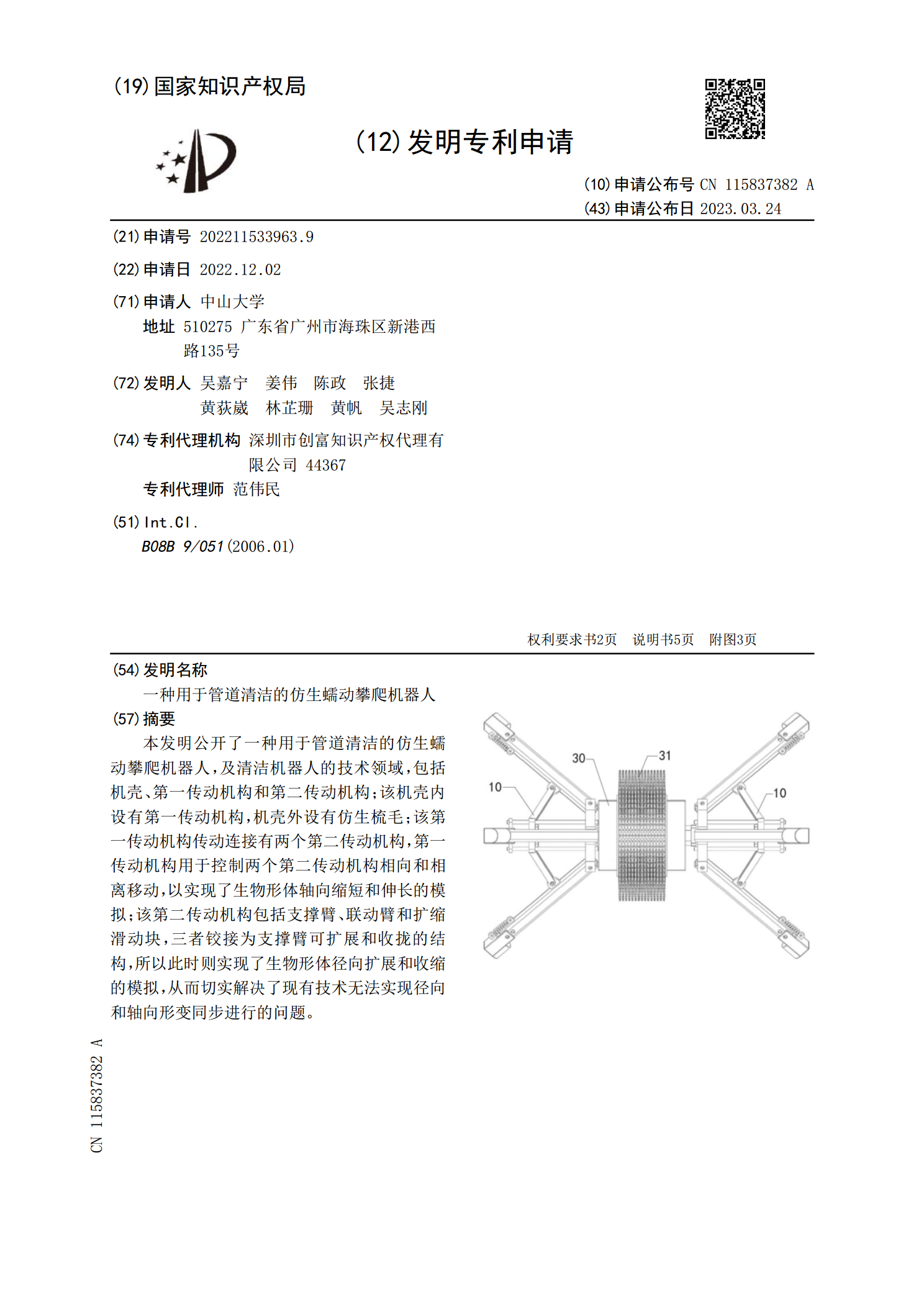
本发明公开了一种用于管道清洁的仿生蠕动攀爬机器人,及清洁机器人的技术领域,包括机壳、第一传动机构和第二传动机构;该机壳内设有第一传动机构,机壳外设有仿生梳毛;该第一传动机构传动连接有两个第二传动机构,第一传动机构用于控制两个第二传动机构相向和相离移动,以实现了生物形体轴向缩短和伸长的模拟;该第二传动机构包括支撑臂、联动臂和扩缩滑动块,三者铰接为支撑臂可扩展和收拢的结构,所以此时则实现了生物形体径向扩展和收缩的模拟,从而切实解决了现有技术无法实现径向和轴向形变同步进行的问题。
一种蠕动管道机器人的控制方法及蠕动管道机器人.pdf
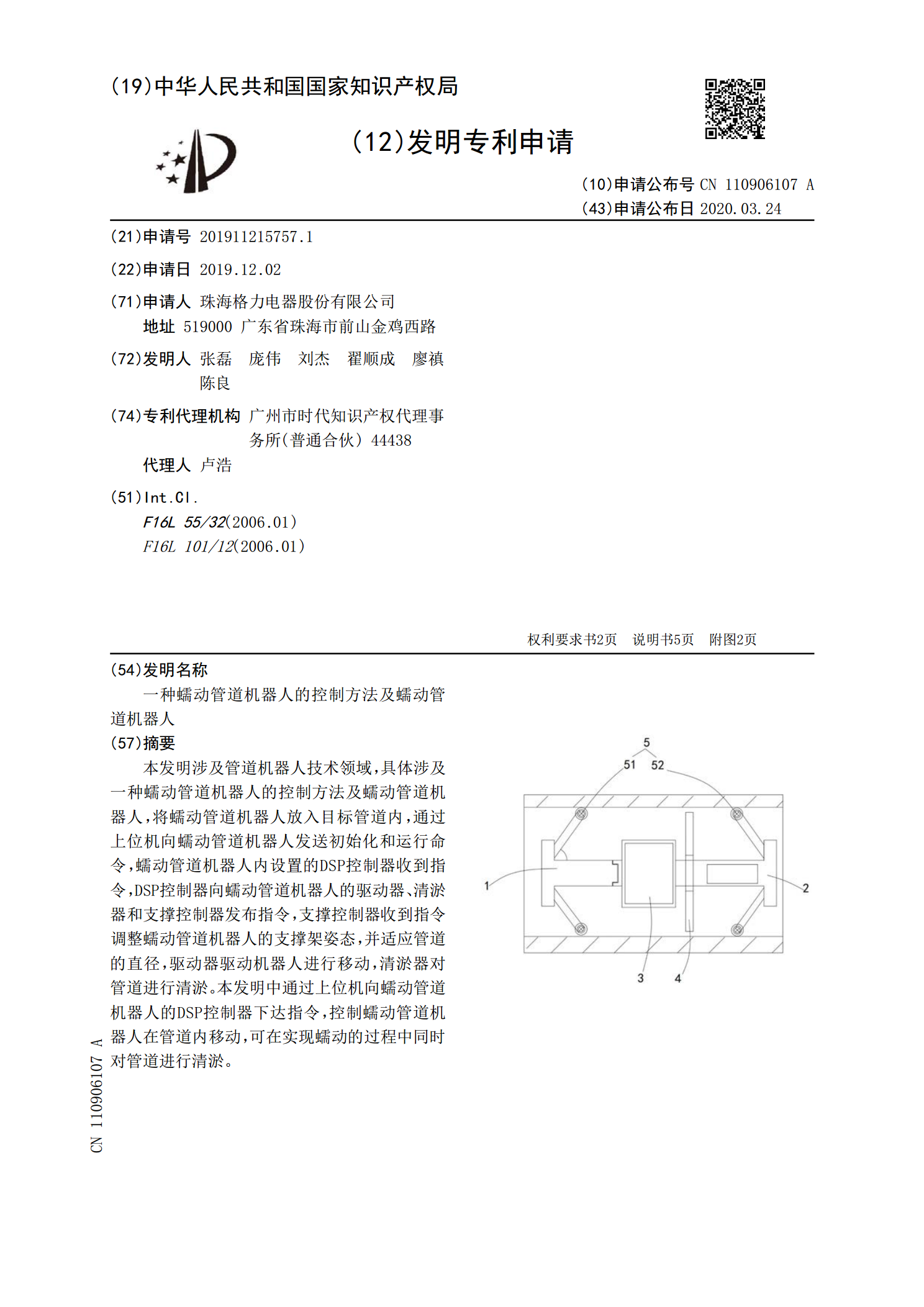
本发明涉及管道机器人技术领域,具体涉及一种蠕动管道机器人的控制方法及蠕动管道机器人,将蠕动管道机器人放入目标管道内,通过上位机向蠕动管道机器人发送初始化和运行命令,蠕动管道机器人内设置的DSP控制器收到指令,DSP控制器向蠕动管道机器人的驱动器、清淤器和支撑控制器发布指令,支撑控制器收到指令调整蠕动管道机器人的支撑架姿态,并适应管道的直径,驱动器驱动机器人进行移动,清淤器对管道进行清淤。本发明中通过上位机向蠕动管道机器人的DSP控制器下达指令,控制蠕动管道机器人在管道内移动,可在实现蠕动的过程中同时对管道
一种用于管道检测的攀爬机器人.pdf
本发明公开了一种用于管道检测的攀爬机器人,其结构包括安装支架、抱闸机构、摄像机、驱动盒、行走轮,驱动盒两侧安装有四个行走轮,驱动盒顶端面设有安装支架,安装支架和驱动盒通过螺铨锁定,安装支架上安装有摄像机,行走轮和驱动盒之间的驱动主轴上装设有摄像机,本发明通过抱闸机构,在所检测的管道内部泽进行转弯的时候,立即对支脚进行角度锁定,稳定支脚,防止发生触碰的问题,稳定拍摄的主体,本发明抱闸机构的动摩擦片上设有两个以上的凸起,与静摩擦片上相互配合,增加和驱动主轴接触摩擦系数,提高锁定的稳定性,抱闸稳定。
一种用于管道检测的攀爬机器人.pdf
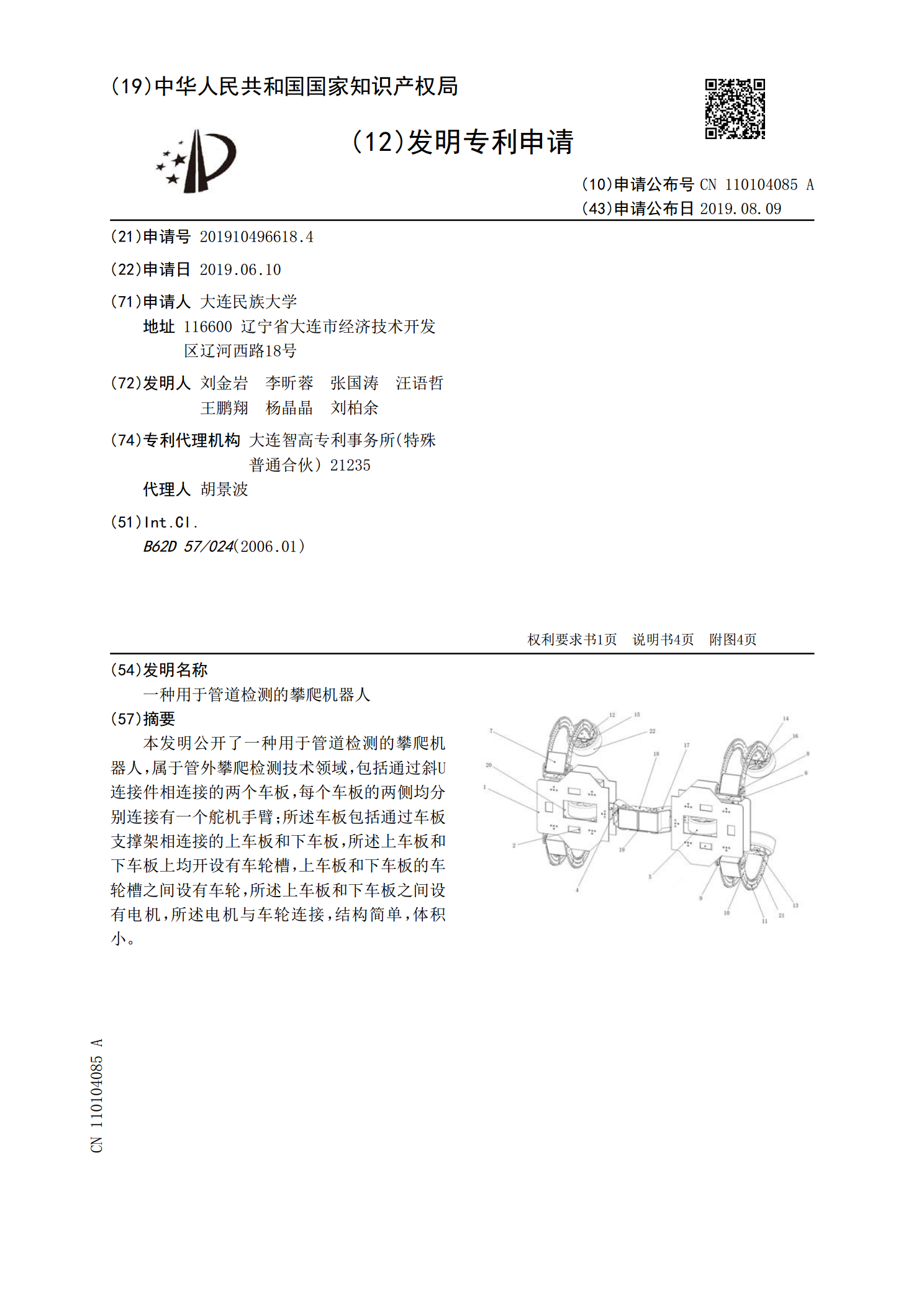
本发明公开了一种用于管道检测的攀爬机器人,属于管外攀爬检测技术领域,包括通过斜U连接件相连接的两个车板,每个车板的两侧均分别连接有一个舵机手臂;所述车板包括通过车板支撑架相连接的上车板和下车板,所述上车板和下车板上均开设有车轮槽,上车板和下车板的车轮槽之间设有车轮,所述上车板和下车板之间设有电机,所述电机与车轮连接,结构简单,体积小。
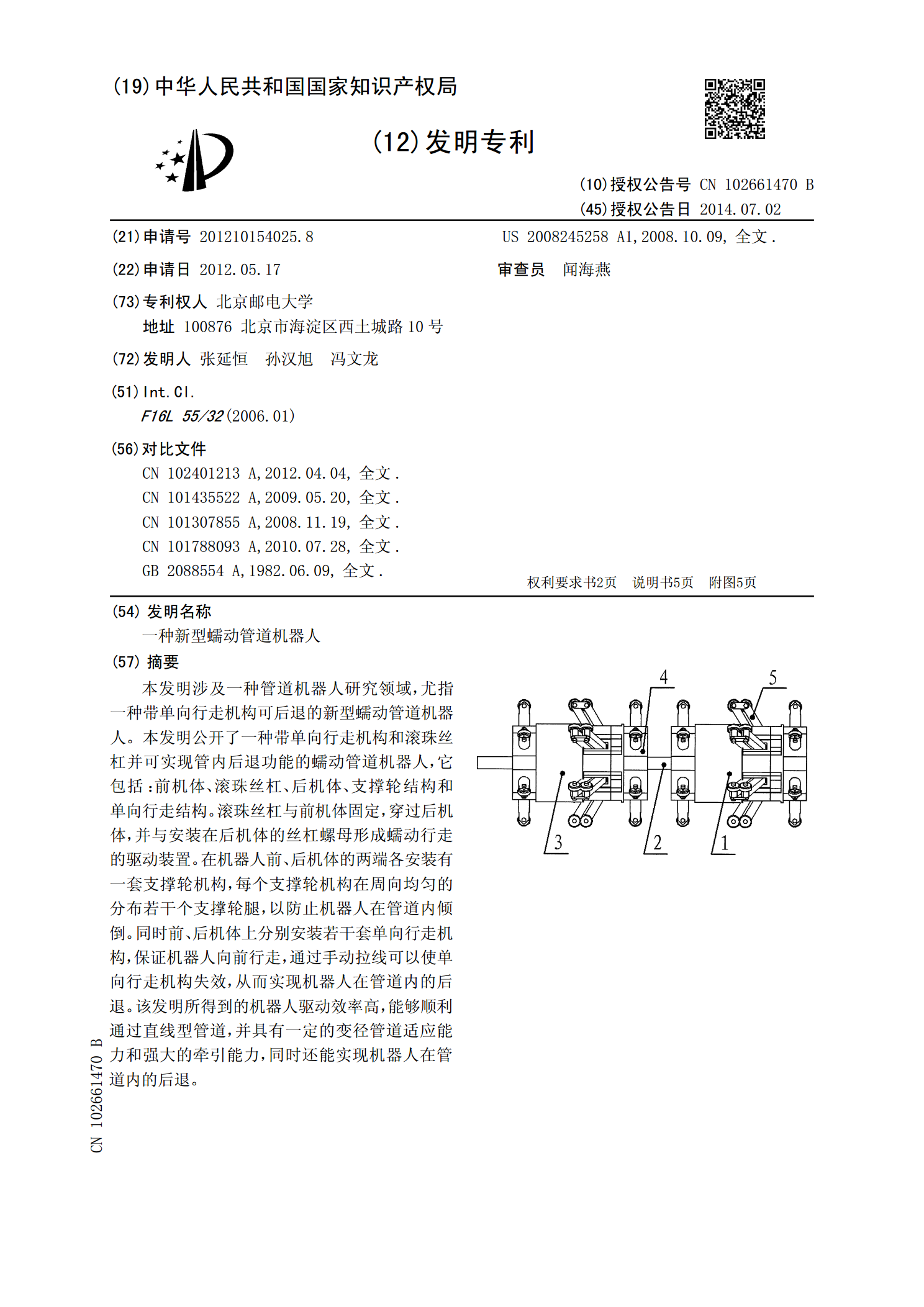
一种新型蠕动管道机器人.pdf
技术领域:本发明涉及一种管道机器人研究领域,尤指一种带单向行走机构可后退的新型蠕动管道机器人。本发明公开了一种带单向行走机构和滚珠丝杠并可实现管内后退功能的蠕动管道机器人,它包括:前机体、滚珠丝杠、后机体、支撑轮结构和单向行走结构。滚珠丝杠与前机体固定,穿过后机体,并与安装在后机体的丝杠螺母形成蠕动行走的驱动装置。在机器人前、后机体的两端各安装有一套支撑轮机构,每个支撑轮机构在周向均匀的分布若干个支撑轮腿,以防止机器人在管道内倾倒。同时前、后机体上分别安装若干套单向行走机构,保证机器人向前行走,通过手动拉