
一种基于聚类和边缘检测的遥感影像海岸线提取方法.pdf

建英****66

1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于聚类和边缘检测的遥感影像海岸线提取方法.pdf
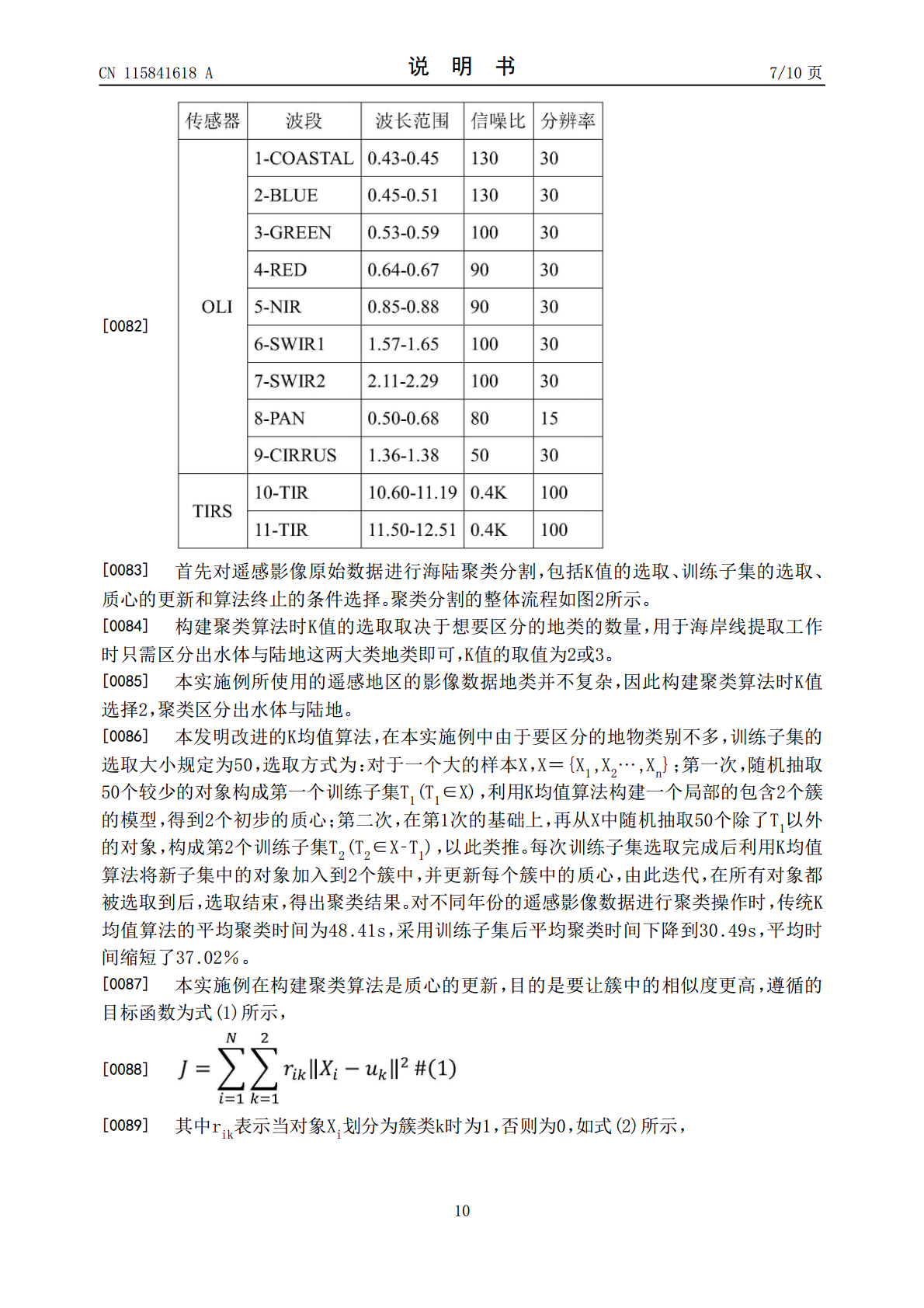
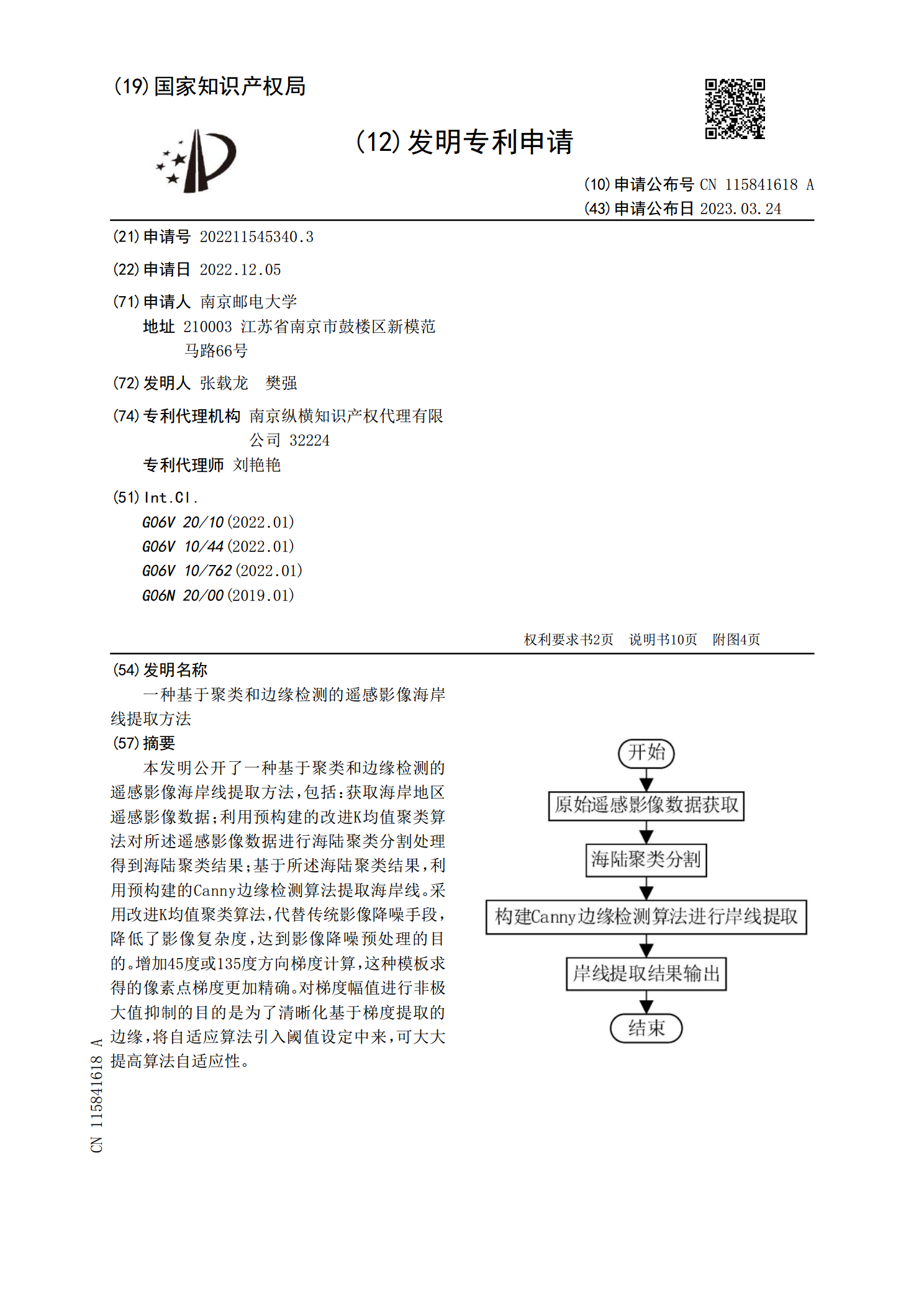
本发明公开了一种基于聚类和边缘检测的遥感影像海岸线提取方法,包括:获取海岸地区遥感影像数据;利用预构建的改进K均值聚类算法对所述遥感影像数据进行海陆聚类分割处理得到海陆聚类结果;基于所述海陆聚类结果,利用预构建的Canny边缘检测算法提取海岸线。采用改进K均值聚类算法,代替传统影像降噪手段,降低了影像复杂度,达到影像降噪预处理的目的。增加45度或135度方向梯度计算,这种模板求得的像素点梯度更加精确。对梯度幅值进行非极大值抑制的目的是为了清晰化基于梯度提取的边缘,将自适应算法引入阈值设定中来,可大大提高算

基于Canny边缘检测思想的改进遥感影像道路提取方法.pptx
基于Canny边缘检测思想的改进遥感影像道路提取方法目录添加目录项标题Canny边缘检测原理传统Canny边缘检测算法传统Canny边缘检测算法的优缺点改进的Canny边缘检测算法算法改进点改进后算法的流程改进后算法的优势遥感影像道路提取方法基于改进Canny边缘检测的道路提取流程道路提取的关键技术道路提取的效果评估实验结果与分析实验数据与实验环境实验结果展示结果分析与其他方法的比较结论与展望本文工作总结未来研究方向感谢观看

基于VGA聚类的遥感影像道路提取.docx
基于VGA聚类的遥感影像道路提取基于VGA聚类的遥感影像道路提取摘要随着城市发展和人口增长,道路交通拥堵问题日益严重。因此,准确、高效地提取遥感影像中的道路信息对城市交通管理具有重要意义。本文提出了一种基于VGA聚类的遥感影像道路提取方法。首先,我们对遥感影像进行预处理,包括直方图均衡化和图像增强,以提高图像的对比度和细节。然后,利用像素颜色和纹理信息对图像进行聚类。最后,利用道路形状和连通性信息,过滤掉非道路区域,得到最终的道路提取结果。实验结果表明,所提方法在遥感影像道路提取中具有较高的效果和准确性。
一种基于迁移学习的高分遥感影像语义边缘提取方法.pdf
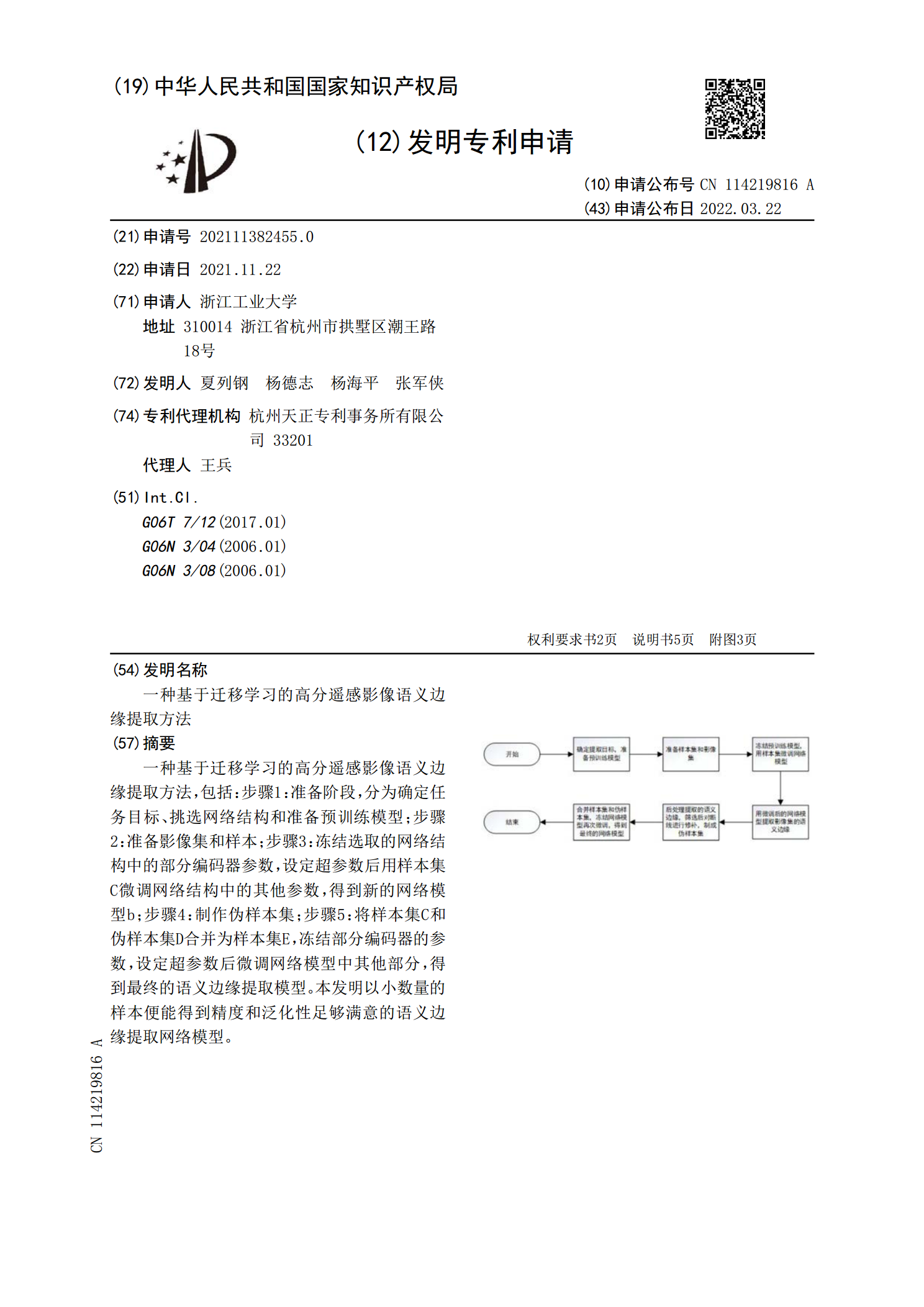
一种基于迁移学习的高分遥感影像语义边缘提取方法,包括:步骤1:准备阶段,分为确定任务目标、挑选网络结构和准备预训练模型;步骤2:准备影像集和样本;步骤3:冻结选取的网络结构中的部分编码器参数,设定超参数后用样本集C微调网络结构中的其他参数,得到新的网络模型b;步骤4:制作伪样本集;步骤5:将样本集C和伪样本集D合并为样本集E,冻结部分编码器的参数,设定超参数后微调网络模型中其他部分,得到最终的语义边缘提取模型。本发明以小数量的样本便能得到精度和泛化性足够满意的语义边缘提取网络模型。

基于模糊聚类的多传感器遥感图像海岸线提取方法.docx
基于模糊聚类的多传感器遥感图像海岸线提取方法基于模糊聚类的多传感器遥感图像海岸线提取方法摘要:随着遥感技术的不断发展,搭载各种传感器的卫星系统能够提供高分辨率的多光谱和高光谱遥感图像。然而,传感器间的差异性以及光谱不匹配问题限制了传统海岸线提取方法的应用。本文提出了一种基于模糊聚类的多传感器遥感图像海岸线提取方法,能够有效地处理传感器差异和光谱不匹配问题,并取得了良好的海岸线提取效果。关键词:遥感图像、海岸线提取、多传感器、模糊聚类1.引言海岸线是海洋与陆地交界的界限,海岸线的准确提取对于海洋环境研究和海