
一种基于边缘计算的养殖管理方法及系统.pdf

诗文****仙女

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于边缘计算的养殖管理方法及系统.pdf
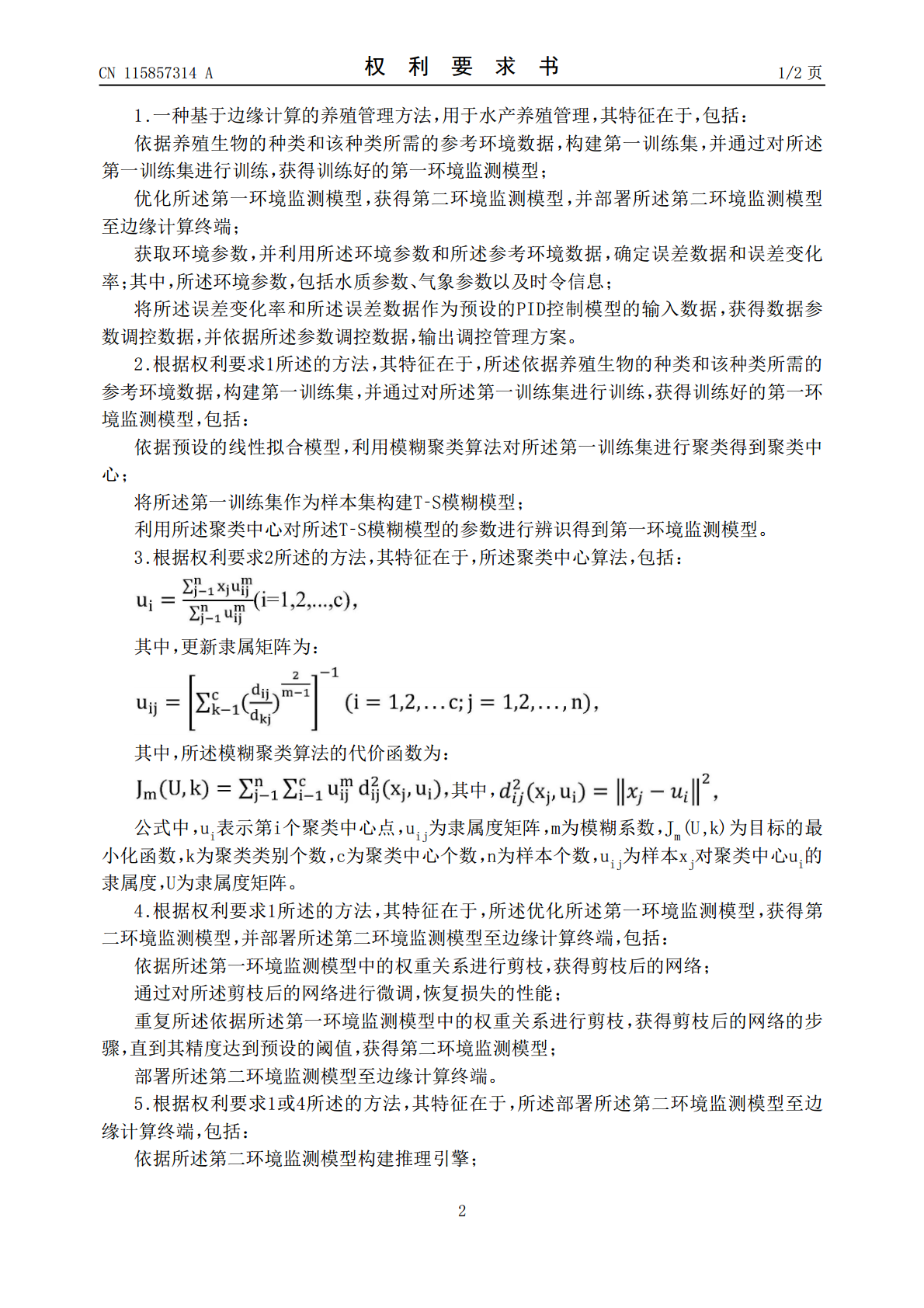
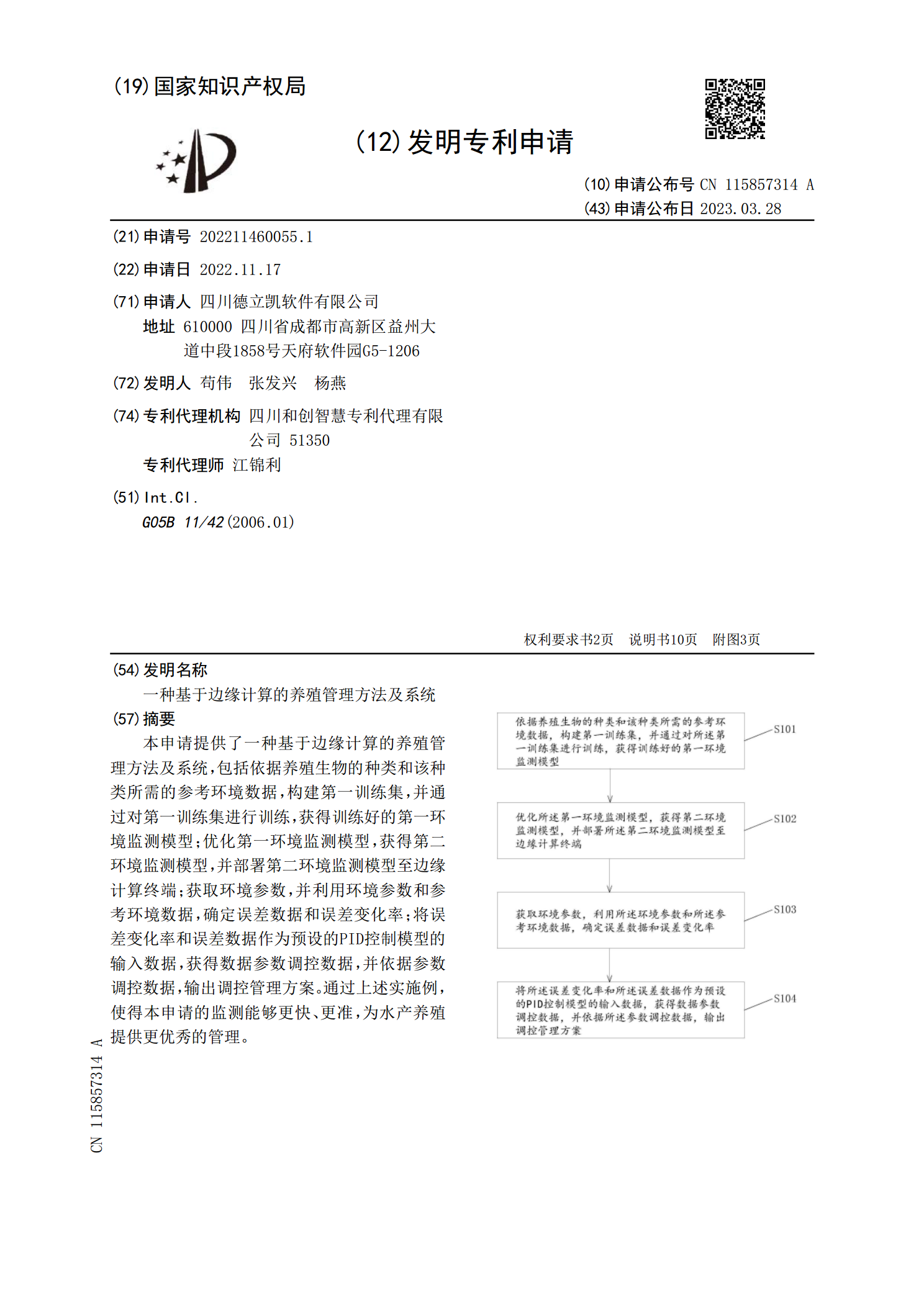
本申请提供了一种基于边缘计算的养殖管理方法及系统,包括依据养殖生物的种类和该种类所需的参考环境数据,构建第一训练集,并通过对第一训练集进行训练,获得训练好的第一环境监测模型;优化第一环境监测模型,获得第二环境监测模型,并部署第二环境监测模型至边缘计算终端;获取环境参数,并利用环境参数和参考环境数据,确定误差数据和误差变化率;将误差变化率和误差数据作为预设的PID控制模型的输入数据,获得数据参数调控数据,并依据参数调控数据,输出调控管理方案。通过上述实施例,使得本申请的监测能够更快、更准,为水产养殖提供更优
一种基于移动边缘计算的切换管理方法.pdf
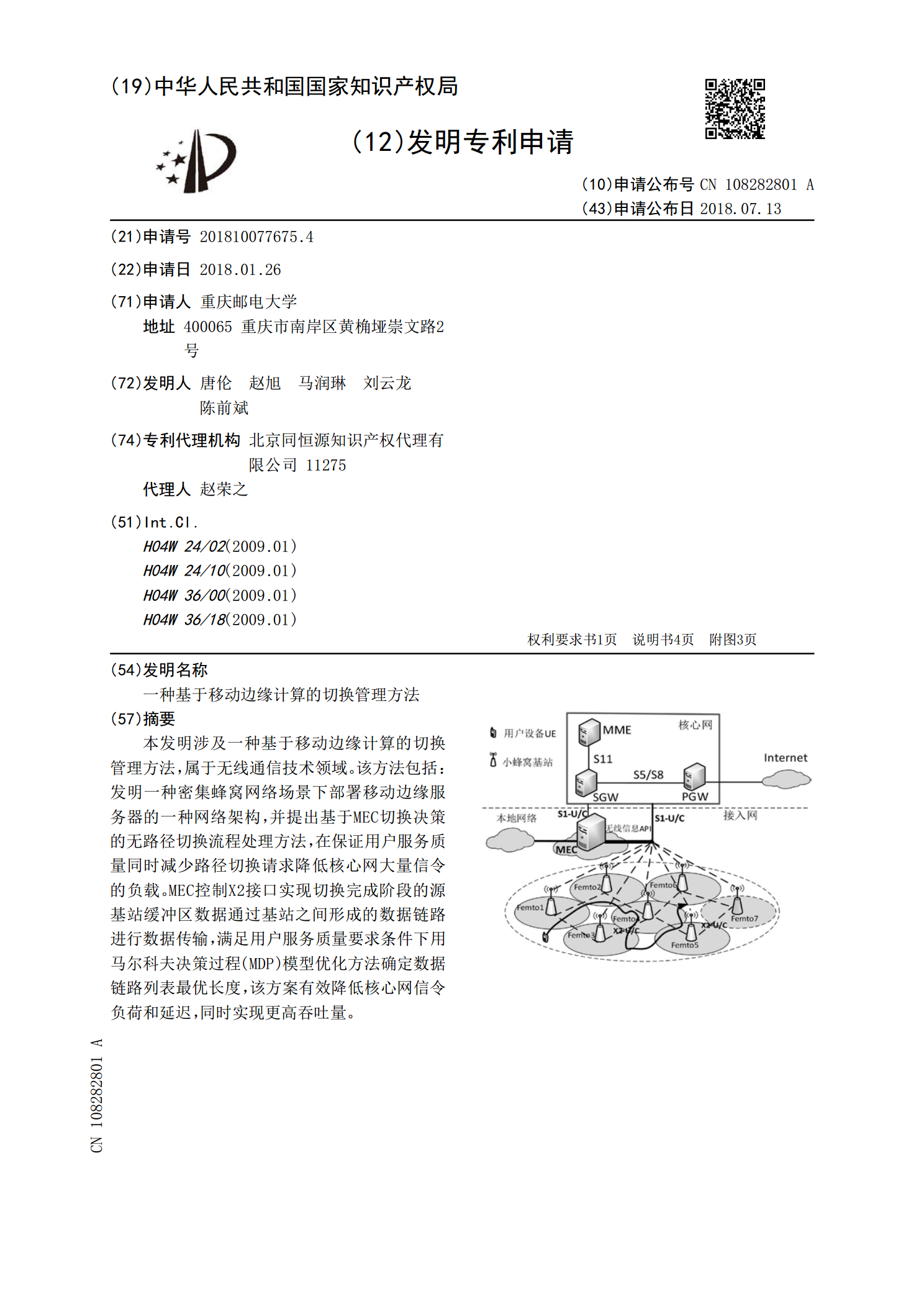
本发明涉及一种基于移动边缘计算的切换管理方法,属于无线通信技术领域。该方法包括:发明一种密集蜂窝网络场景下部署移动边缘服务器的一种网络架构,并提出基于MEC切换决策的无路径切换流程处理方法,在保证用户服务质量同时减少路径切换请求降低核心网大量信令的负载。MEC控制X2接口实现切换完成阶段的源基站缓冲区数据通过基站之间形成的数据链路进行数据传输,满足用户服务质量要求条件下用马尔科夫决策过程(MDP)模型优化方法确定数据链路列表最优长度,该方案有效降低核心网信令负荷和延迟,同时实现更高吞吐量。
一种基于边缘计算的智能微网能量管理方法.pdf
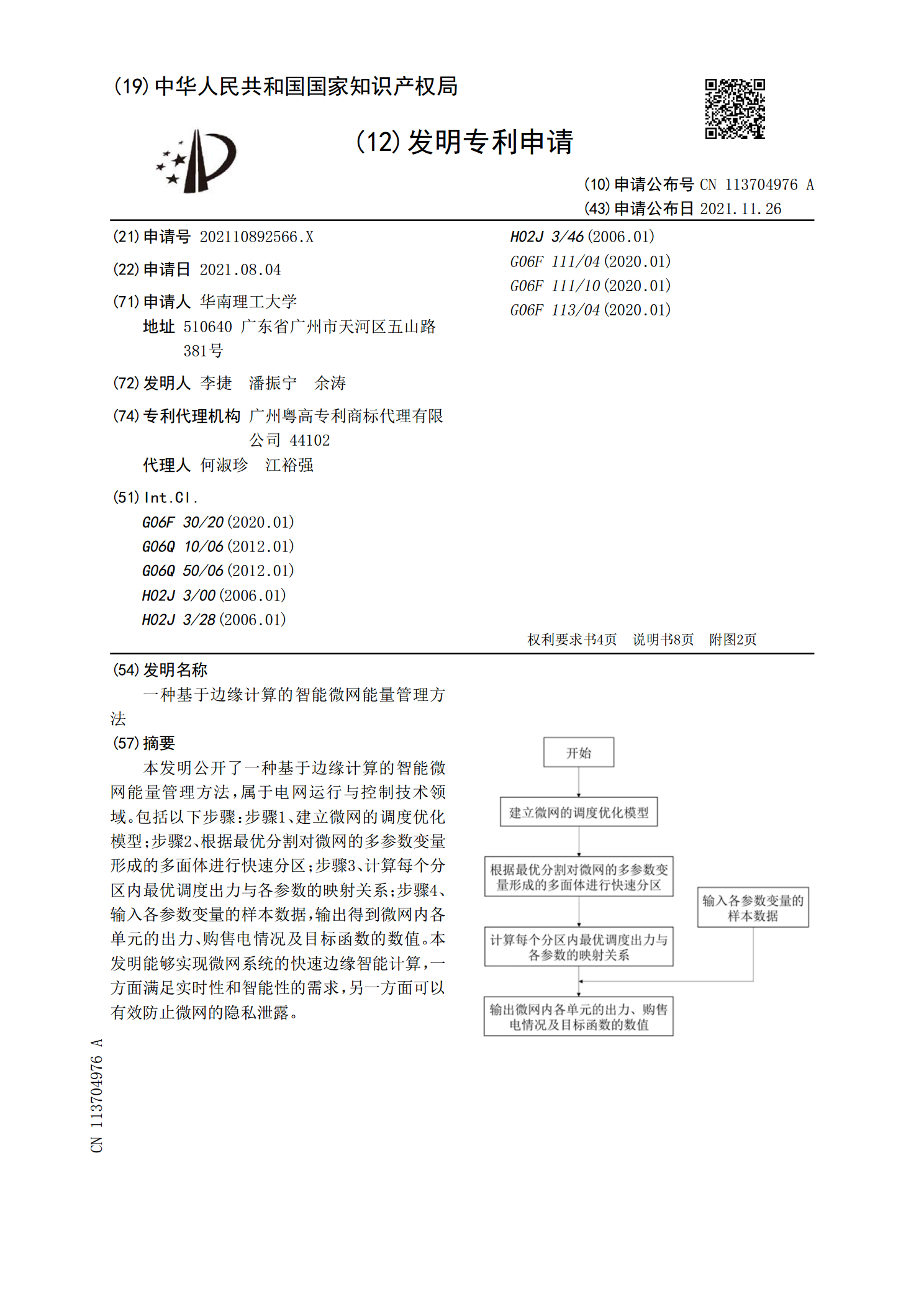
本发明公开了一种基于边缘计算的智能微网能量管理方法,属于电网运行与控制技术领域。包括以下步骤:步骤1、建立微网的调度优化模型;步骤2、根据最优分割对微网的多参数变量形成的多面体进行快速分区;步骤3、计算每个分区内最优调度出力与各参数的映射关系;步骤4、输入各参数变量的样本数据,输出得到微网内各单元的出力、购售电情况及目标函数的数值。本发明能够实现微网系统的快速边缘智能计算,一方面满足实时性和智能性的需求,另一方面可以有效防止微网的隐私泄露。
一种基于MEC边缘智能网关的用电管理方法及系统.pdf
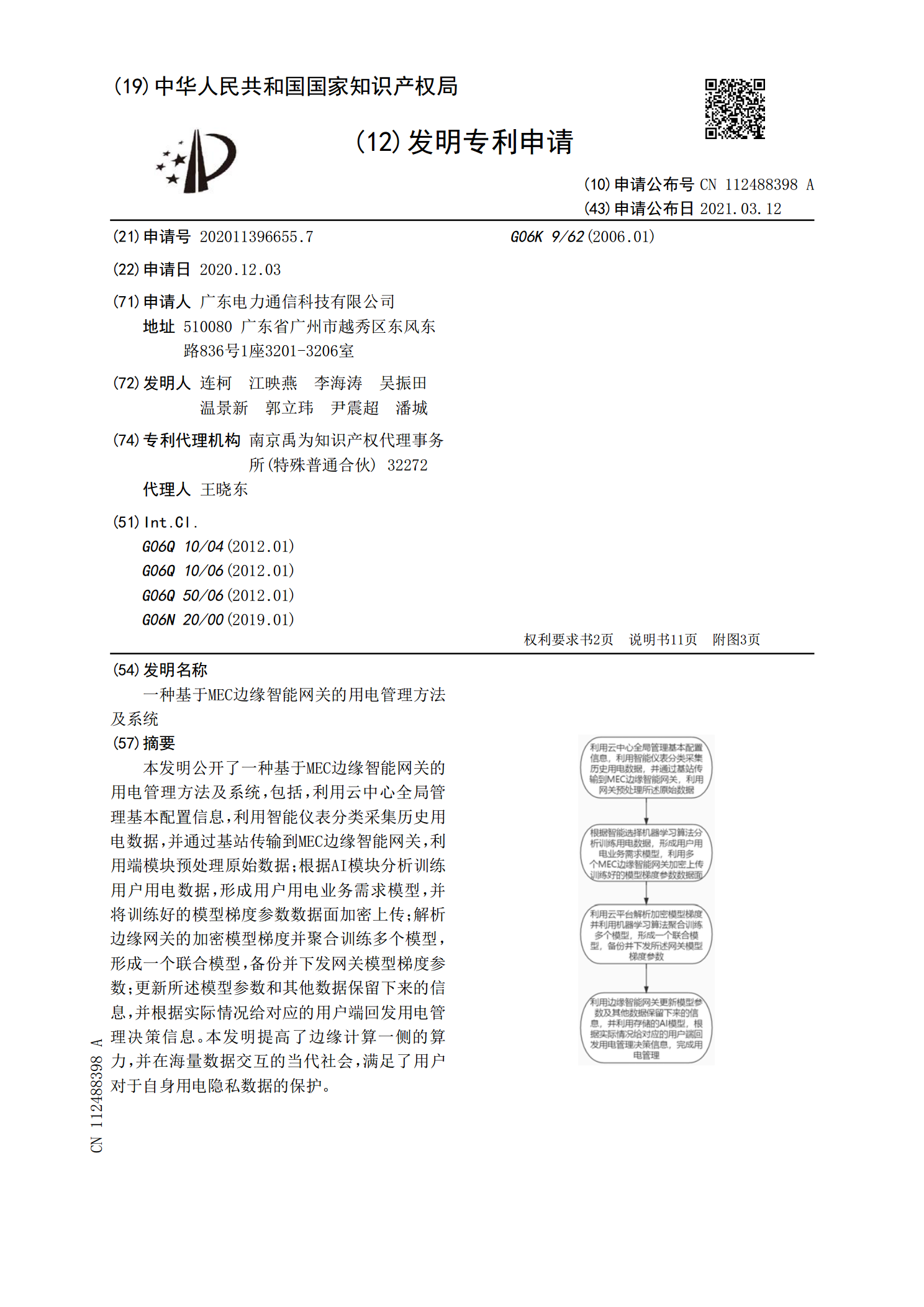
本发明公开了一种基于MEC边缘智能网关的用电管理方法及系统,包括,利用云中心全局管理基本配置信息,利用智能仪表分类采集历史用电数据,并通过基站传输到MEC边缘智能网关,利用端模块预处理原始数据;根据AI模块分析训练用户用电数据,形成用户用电业务需求模型,并将训练好的模型梯度参数数据面加密上传;解析边缘网关的加密模型梯度并聚合训练多个模型,形成一个联合模型,备份并下发网关模型梯度参数;更新所述模型参数和其他数据保留下来的信息,并根据实际情况给对应的用户端回发用电管理决策信息。本发明提高了边缘计算一侧的算力,

一种基于边缘计算的数据采集系统.pdf
本发明涉及数据采集技术领域,且公开了一种基于边缘计算的数据采集系统,包括监测模块,所述监测模块的输出端与数据变量采集模块的输入端连接,所述数据变量采集模块的输出端与数据传输模块的输入端连接,所述数据传输模块的输出端与数据接收模块的输入端连接,所述数据接收模块的输出端与数据筛选模块的输入端连接,所述数据筛选模块的输出端与数据分类模块的输入端连接。本发明中,P‑RISC系统结构由一组呢和许多存贮单元组成,通过一组开关网将他们联结起来,P‑RISC没有等待一匹配单元,取而替之,它将计算顺序键有关的全部运算数存贮