
一种基于ConvNet指纹特征的室内高精度定位方法.pdf

努力****星驰

1/9

2/9

3/9
4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于ConvNet指纹特征的室内高精度定位方法.pdf
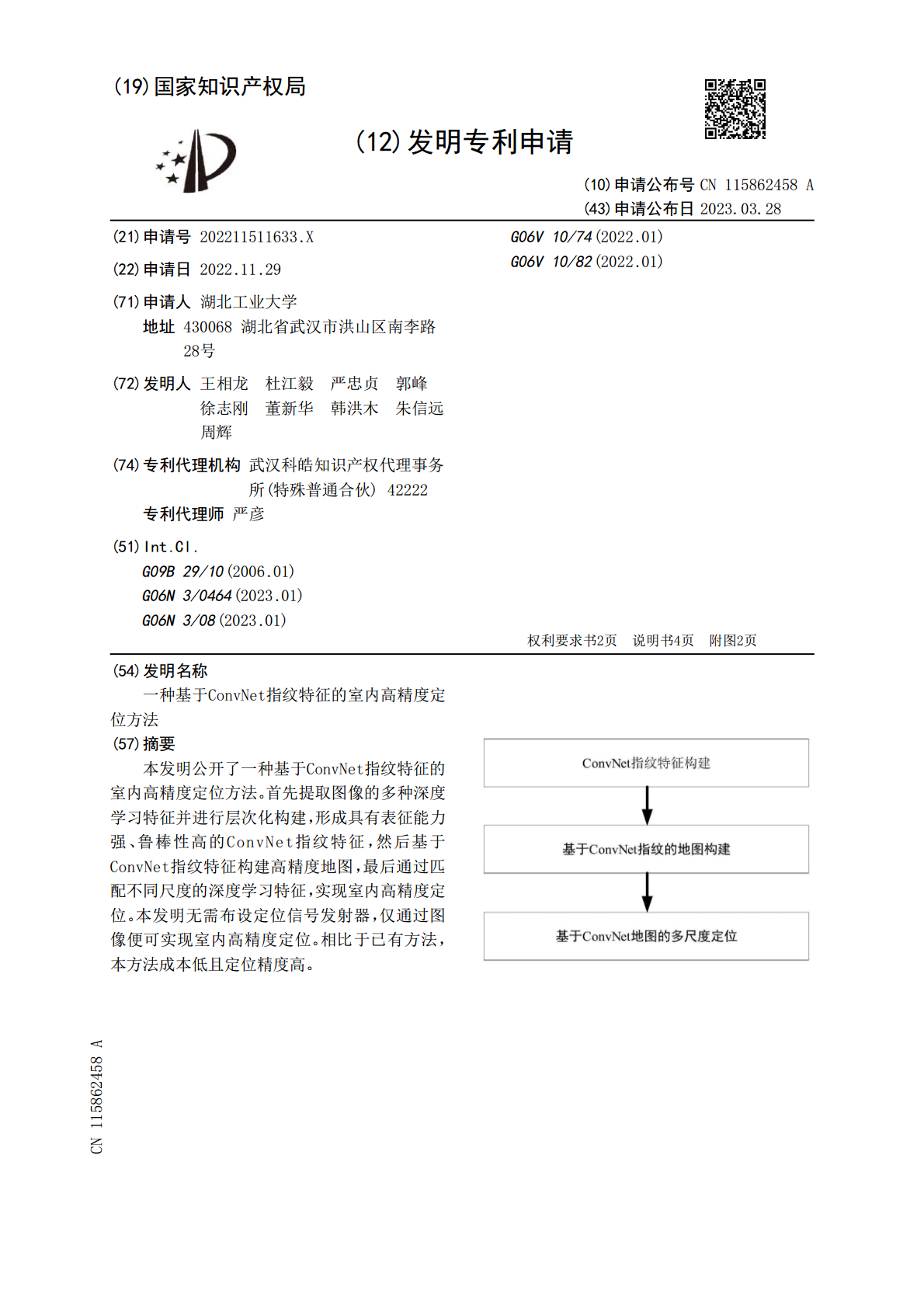
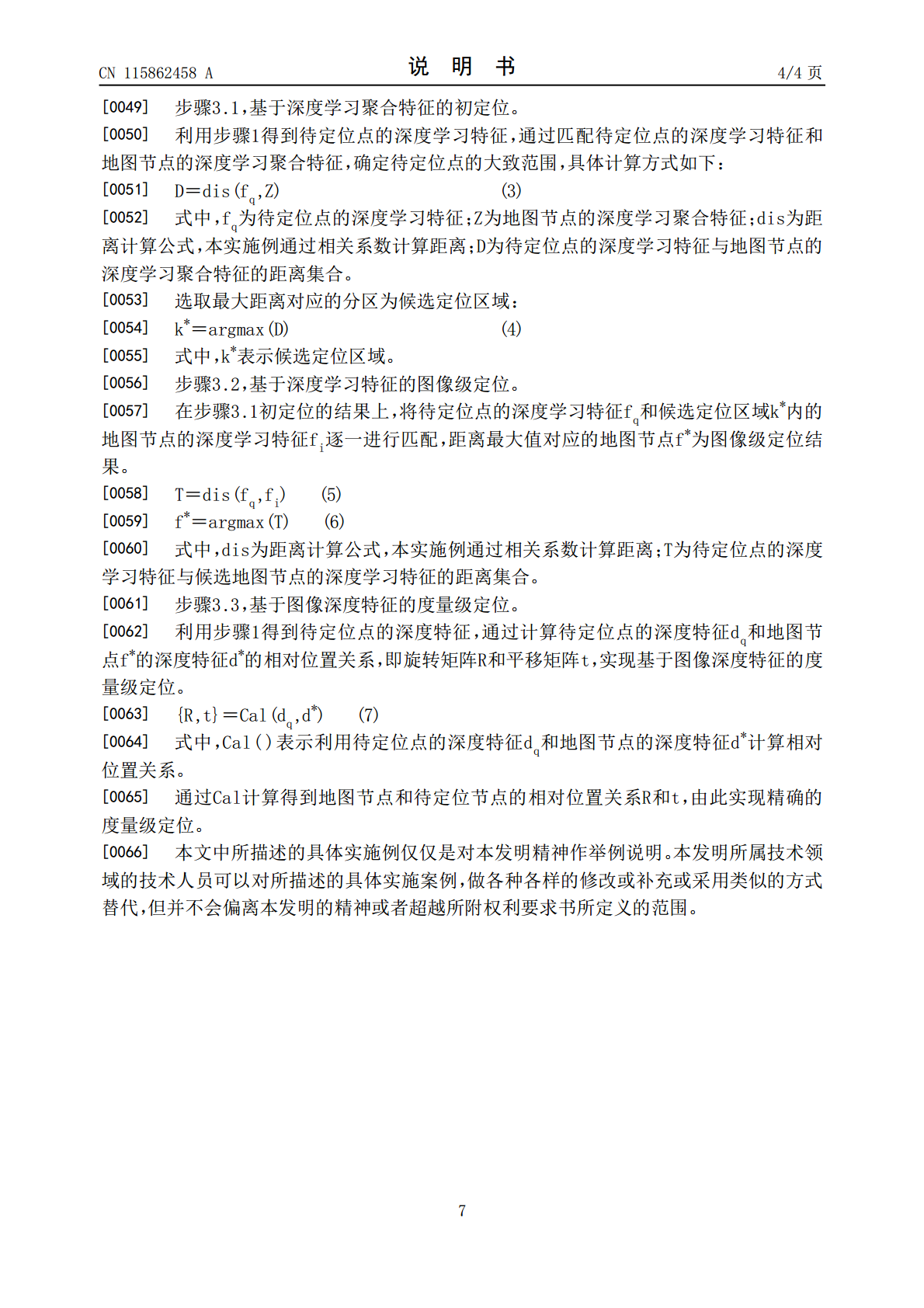
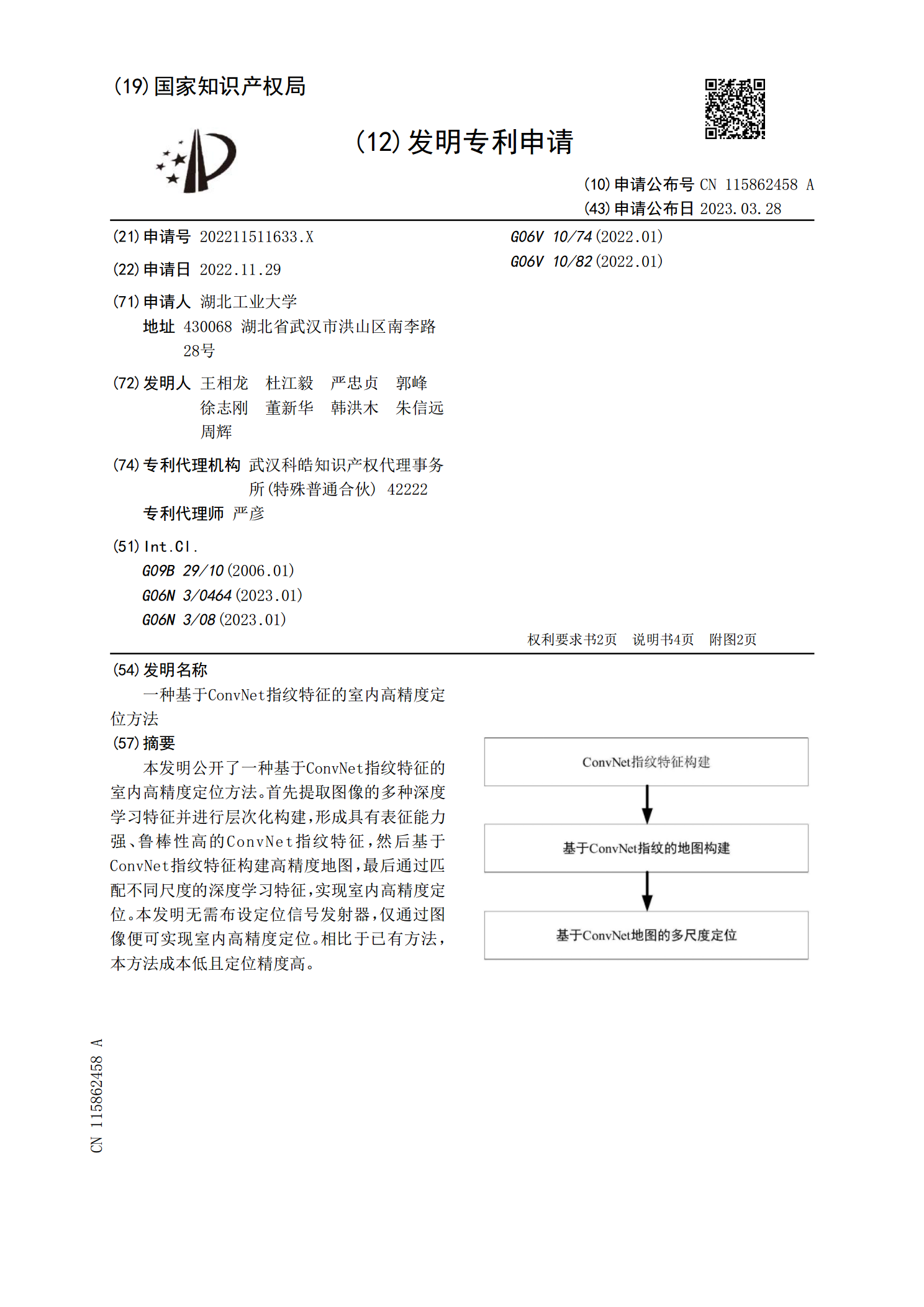
本发明公开了一种基于ConvNet指纹特征的室内高精度定位方法。首先提取图像的多种深度学习特征并进行层次化构建,形成具有表征能力强、鲁棒性高的ConvNet指纹特征,然后基于ConvNet指纹特征构建高精度地图,最后通过匹配不同尺度的深度学习特征,实现室内高精度定位。本发明无需布设定位信号发射器,仅通过图像便可实现室内高精度定位。相比于已有方法,本方法成本低且定位精度高。

基于可见光指纹的室内高精度定位方法.pptx
基于可见光指纹的室内高精度定位方法目录添加目录项标题可见光指纹室内定位原理可见光通信技术简介可见光指纹形成机制定位算法基本原理可见光指纹数据处理指纹数据采集指纹数据预处理特征提取与匹配定位系统硬件实现可见光通信硬件组成接收端硬件设计发射端硬件设计定位系统软件实现定位算法优化可见光通信协议设计系统集成与测试定位系统性能评估定位精度测试系统稳定性测试抗干扰性能测试实时性测试可见光指纹室内定位技术应用前景与挑战技术应用领域拓展技术发展面临的挑战技术未来发展趋势感谢观看

基于可见光指纹的室内高精度定位方法.docx
基于可见光指纹的室内高精度定位方法基于可见光指纹的室内高精度定位方法随着物联网和大数据技术的发展,室内定位技术越来越受到关注。在商场、医院、机场等公共场所,室内定位技术可以提高人员管理、资源调度、安全监控等方面的效率,也可以为室内导航、定位服务提供支持。目前,室内定位技术主要有基于WiFi、蓝牙、红外、超声等无线信号的定位方法。但这些方法都存在一些局限性,如定位精度不高、信号受干扰、设备需求高等问题。因此,基于可见光指纹的室内高精度定位方法备受关注。可见光通信作为一种新型的无线通信技术,由于具有频谱资源丰

一种基于位置指纹的室内WLAN定位方法.docx
一种基于位置指纹的室内WLAN定位方法Title:IndoorWLANLocalizationMethodbasedonLocationFingerprintingAbstract:Withtherapidgrowthofindoorwirelessnetworks,thereisanincreasingdemandforaccurateindoorlocalizationmethods.Inthispaper,weproposeanovelindoorWLANlocalizationmethodbase

一种基于位置指纹的室内定位方法.docx
一种基于位置指纹的室内定位方法基于位置指纹的室内定位方法摘要:室内定位是一项重要的技术,在很多应用领域中发挥着重要作用。然而,由于室内环境的复杂性和多样性,室内定位仍然是一个具有挑战性的问题。本文介绍了一种基于位置指纹的室内定位方法,该方法通过采集和处理各个位置的信号指纹,以实现高精度的室内定位。具体方法包括信号采集、指纹构建和定位算法。实验结果表明该方法具有较高的定位精度和鲁棒性,在实际应用中具有很大的潜力。关键词:室内定位、位置指纹、信号采集、指纹构建、定位算法1.引言室内定位是一项在商业和智能家居等