
一种模块化多电平换流器控制方法.pdf

努力****亚捷

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种模块化多电平换流器控制方法.pdf
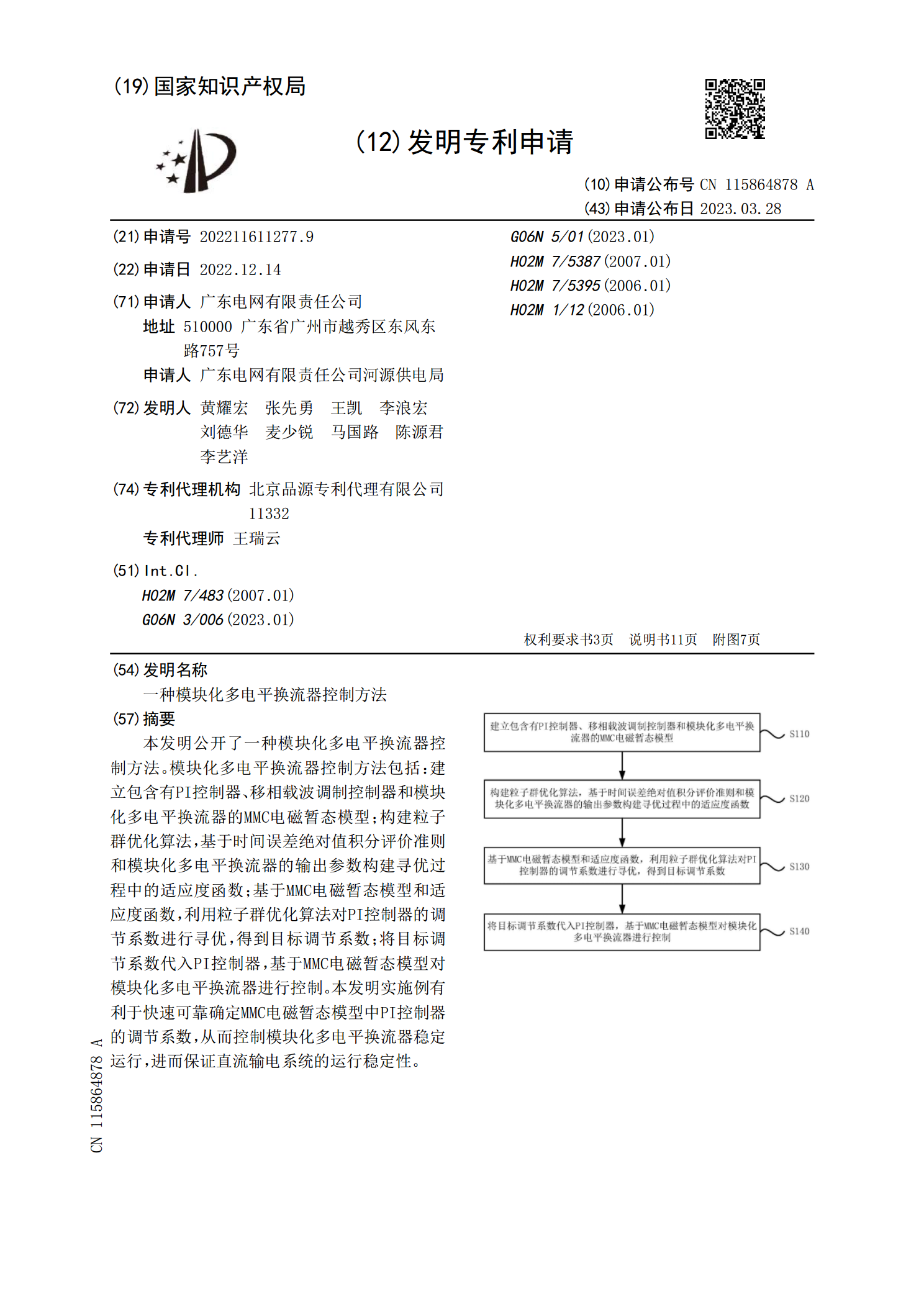
本发明公开了一种模块化多电平换流器控制方法。模块化多电平换流器控制方法包括:建立包含有PI控制器、移相载波调制控制器和模块化多电平换流器的MMC电磁暂态模型;构建粒子群优化算法,基于时间误差绝对值积分评价准则和模块化多电平换流器的输出参数构建寻优过程中的适应度函数;基于MMC电磁暂态模型和适应度函数,利用粒子群优化算法对PI控制器的调节系数进行寻优,得到目标调节系数;将目标调节系数代入PI控制器,基于MMC电磁暂态模型对模块化多电平换流器进行控制。本发明实施例有利于快速可靠确定MMC电磁暂态模型中PI控制

一种优化的模块化多电平换流器电压均衡控制方法.docx
一种优化的模块化多电平换流器电压均衡控制方法一、引言模块化多电平换流器(MMC)因其灵活性和高效性在高压直流输电(HVDC)领域越来越受欢迎。MMC的电压控制是实现其稳定性和可靠性的关键因素。MMC的电容器电压不平衡问题是MMC控制中面临的主要问题之一。由于电容器电压不平衡问题可能导致电容器寿命缩短和系统不稳定性,发展一种优化的模块化多电平换流器电压均衡控制方法变得至关重要。本文将介绍一种优化的模块化多电平换流器电压均衡控制方法,并对其实现、仿真和实验结果进行详细描述。二、问题描述MMC通常由若干个模块组

一种优化的模块化多电平换流器电压均衡控制方法.pdf
2011年5月电工技术学报Vol.26No.5第26卷第5期TRANSACTIONSOFCHINAELECTROTECHNICALSOCIETYMay2011一种优化的模块化多电平换流器电压均衡控制方法1112屠卿瑞徐政郑翔张静(1.浙江大学电气工程学院杭州3100272.浙江电力调度通信中心杭州310007)摘要模块化多电平换流器(MMC)的各个子模块间的电压均衡问题,是MMC拓扑的难点之一。本文在采用最近电平调制方式的基础上,对按子模块电容电压排序后,根据桥臂电流方向直接选择相应子模块触发的传统电压均

模块化多电平换流器电容电压的一种平衡控制方法.pdf
5/201223变流器·控制模块化多电平换流器电容电压的一种平衡控制方法李云丰,宋平岗,王楚(华东交通大学电气与电子工程学院,江西南昌330013)摘要:介绍了模块化多电平换流器(modularmultilevelconverter,MMC)的运行原理以及模块电容电压的平衡控制。考虑传统的单相桥臂平均电压控制可能会在外部干扰的情况下输出电压不平衡而导致波形畸变,结合载波移相调制方法提出了三相桥臂平均电压控制的方法,并对子模块电容电压采取比例积分调节,使得模块电容电压平衡在稳定的范围内。仿真验证了电容电压平

模块化多电平换流器的若干优化控制方法研究.docx
模块化多电平换流器的若干优化控制方法研究论文题目:模块化多电平换流器的若干优化控制方法研究摘要:随着电力电子技术的快速发展,模块化多电平换流器在高压直流输电领域得到了广泛应用。然而,该技术仍然面临着一些挑战,例如效率低、谐波问题等,这些问题需要通过优化控制方法来解决。因此,本文系统地研究了模块化多电平换流器的若干优化控制方法,包括功率平衡控制、谐波抑制技术、失衡电流控制等。研究结果表明,通过采用这些优化控制方法,可以显著提高换流器的性能,并减少其对电力系统的负面影响。关键词:模块化多电平换流器;优化控制方